Impreso en 3d jetsprint jet boat v1 en 3D para imprimir







4947 Visualizaciones 1 Me gusta 3 Descargas Descarga
La VERSIÓN 2 ES la SALIDA: https://www.youmagine.com/designs/prototye-3d-printed-jetsprint-jet-bo...at-v2
Hilo del foro: https://www.rcgroups.com/forums/showthread.php?3061106
Un proyecto personal que he estado trabajando. Publicar aquí ya que no hay muchos impresos en 3D en jetboat diseños por ahí.
lijingwei hecho demasiado. Él también hizo algunas mejoras. Usted puede encontrar estas aquí: https://www.thingiverse.com/thing:2890756/remixes
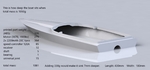
Especificaciones:
Impulsor: 29mm con 29mm de tono (18-29 cancha de archivos incluido)
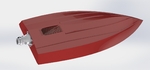
Boquilla: 22mm
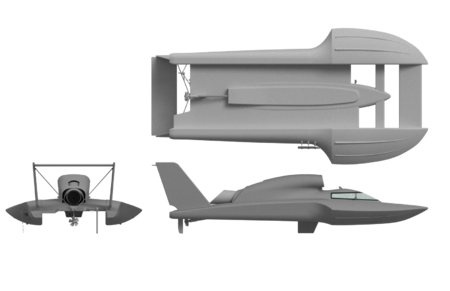
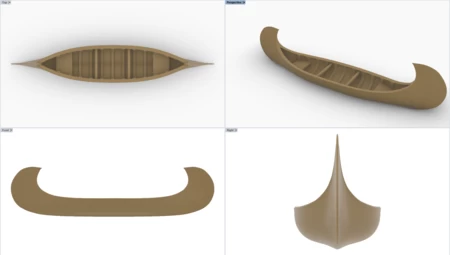
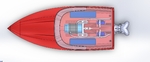
Casco eslora: 430mm
Casco ancho: ~165 mm
9g servo de dirección
puntos de montaje para la marcha atrás opcional cubo y servo
Reunidos en masa: 1308kg
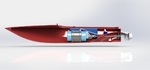
Sistema de alimentación:
3674 sin escobillas inrunner motor @1900KV. 61A max. Max 1800w de potencia.
2x baterías de 2200 mah, 25C.
120A por ESC
El crédito para el que se incluyen axial de propulsión a chorro de cálculo hoja de cálculo, va a RCgroups miembro UnusualRC. ACTUALIZACIÓN: se me ha notificado que hay un error en una de las fórmulas en la hoja. Por favor, ser conscientes de que.
TAREAS:
El vídeo de la misma en la parte superior de la velocidad con la rueda de Engranaje movido adelante corriendo a 6S, a continuación, volver a probar
HECHO:
Prueba de barco con 6S de configuración. el barco es overpowered que es muy divertido. TAN rápido. Recibe una gran cantidad de aire.
EN PROGRESO
La próxima versión mayor del casco - cálculos son correctos y casco sat mucho más profundo en el agua que en los cálculos indicados
Mejorar la tapa a ser más apretado de agua en la próxima versión.
Otras notas:
baterías, esc y motor todos se quedaron de piedra fría en 3S modo corriendo a toda velocidad. El Motor es wayyy de gran tamaño para este barco.
Es en ninguna parte cerca de los usos de toda la potencia disponible para que se ejecute en 3S.
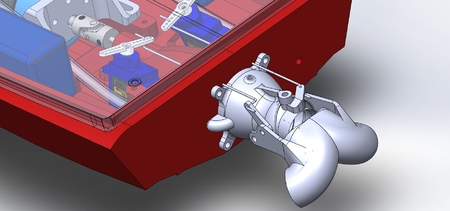
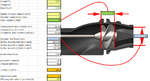
El impulsor está destinado a ser pegadas en su 3mm eje de accionamiento. Es recomendable que la arena el eje ligeramente antes de aplicar el pegamento para asegurar una buena adherencia.
La boquilla lleva a 3mm de interior, de 4 mm de diámetro exterior tubo de teflón como un casquillo para el eje (marque las últimas dos fotos de arriba). Yo de corte de 5 mm fuera de mi bowden tubo y se utiliza esta. El teflón es muy resistente y de baja fricción en el material perfecto para su uso aquí.
Lista de Materiales:
- ~430 g de filamento
- M3 varios tornillos
- tornillos autorroscantes
- 1x 100 mm de largo, 3 mm de varilla de acero inoxidable como eje de transmisión.
- 1x 623RS cojinete (623ZZ también está bien, pero el sello de goma del curso es mejor cuando el agua está involucrada)
- 1x 750mm de la varilla de empuje del servo de alambre
- 1x flexible acoplador para ir desde el motor al eje de transmisión. He utilizado 3 a 5 mm adaptador. La mayoría de 36mm de diámetro motores de uso de 5mm ejes. Yo recomendaría una articulación universal que se puede encontrar por $1-2 en aliexpress. Usted puede imprimir su propia junta universal directo o acoplador (ambos son imprimibles y se incluye en los archivos).
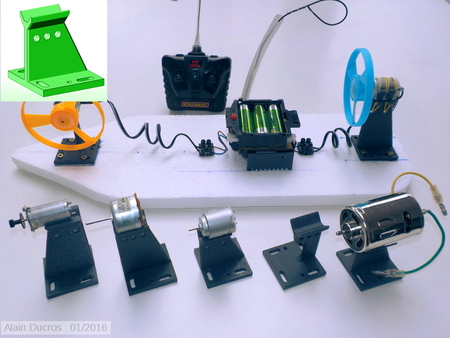
Electrónica:
- 2x servos 9g (1x si no optar por la reversión de la cubeta)
- 1x Motor + ESC
Voy a utilizar este motor: https://hobbyking.com/en_us/turnigy-xk3674-1900kv-brushless-inrunner.html
Y este ESC: https://hobbyking.com/en_us/hobbyking-120a-boat-esc-4a-ubec.html
Usted querrá elegir un motor/batería combo que ofrece hasta 20.000 rpm y puede manejar alrededor de ~75A continua. Se refieren a: https://www.kehrer-modellbau.de/en/kmb-jet28/jet-drives/kmb-jet28-rev.-3-with-short-steering-nozzle
Incluido en los archivos de soportes de montaje de 36 mm y 28 mm de diámetro inrunner motores así como un soporte para el común de los motores del avión utilizando 19mm espaciamiento del agujero. Si usted necesita un soporte para un motor diferente, que me haga saber las dimensiones y voy a hacer una para usted.
- 2x baterías lipo. Usted querrá dos: uno para colocar en cualquier lado del motor para mantener el equilibrio. Voy a utilizar 2x 2200mAh 3S lipo baterías. Me gusta usar velcro para mantener las baterías en su lugar.
- 1x transmisor/receptor de conjunto. Voy a usar mis Flysky i6 transmisor con el receptor de la
Si usted tiene alguna pregunta, por favor pregunte. Como se señaló en la parte superior de la página con un enlace, ahora hay una mejora de la nueva versión publicada.
Diseñador
Jotham BDescripción del modelo 3d
Enlace para la versión 2 está en la descripciónLa VERSIÓN 2 ES la SALIDA: https://www.youmagine.com/designs/prototye-3d-printed-jetsprint-jet-bo...at-v2
Hilo del foro: https://www.rcgroups.com/forums/showthread.php?3061106
Un proyecto personal que he estado trabajando. Publicar aquí ya que no hay muchos impresos en 3D en jetboat diseños por ahí.
lijingwei hecho demasiado. Él también hizo algunas mejoras. Usted puede encontrar estas aquí: https://www.thingiverse.com/thing:2890756/remixes
Especificaciones:
Impulsor: 29mm con 29mm de tono (18-29 cancha de archivos incluido)
Boquilla: 22mm
Casco eslora: 430mm
Casco ancho: ~165 mm
9g servo de dirección
puntos de montaje para la marcha atrás opcional cubo y servo
Reunidos en masa: 1308kg
Sistema de alimentación:
3674 sin escobillas inrunner motor @1900KV. 61A max. Max 1800w de potencia.
2x baterías de 2200 mah, 25C.
120A por ESC
El crédito para el que se incluyen axial de propulsión a chorro de cálculo hoja de cálculo, va a RCgroups miembro UnusualRC. ACTUALIZACIÓN: se me ha notificado que hay un error en una de las fórmulas en la hoja. Por favor, ser conscientes de que.
TAREAS:
El vídeo de la misma en la parte superior de la velocidad con la rueda de Engranaje movido adelante corriendo a 6S, a continuación, volver a probar
HECHO:
Prueba de barco con 6S de configuración. el barco es overpowered que es muy divertido. TAN rápido. Recibe una gran cantidad de aire.
EN PROGRESO
La próxima versión mayor del casco - cálculos son correctos y casco sat mucho más profundo en el agua que en los cálculos indicados
Mejorar la tapa a ser más apretado de agua en la próxima versión.
Otras notas:
baterías, esc y motor todos se quedaron de piedra fría en 3S modo corriendo a toda velocidad. El Motor es wayyy de gran tamaño para este barco.
Es en ninguna parte cerca de los usos de toda la potencia disponible para que se ejecute en 3S.
Parametros de impresión 3d
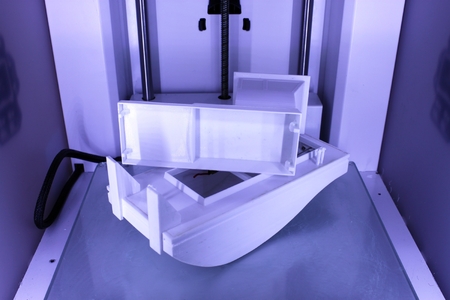
He impreso mi casco de 0,3 mm de capas con 3 perímetros y 25% de relleno con estructuras de apoyo habilitado. El casco es mejor impreso en PETG o ABS... para una mayor durabilidad. He impreso mi impulsor en la PLA ya de cómo es más fácil conseguir un muy limpia de impresión cuando se utiliza material de apoyo. Me parece que se imprime mejor en el 0,15 mm así que recomiendo que.El impulsor está destinado a ser pegadas en su 3mm eje de accionamiento. Es recomendable que la arena el eje ligeramente antes de aplicar el pegamento para asegurar una buena adherencia.
La boquilla lleva a 3mm de interior, de 4 mm de diámetro exterior tubo de teflón como un casquillo para el eje (marque las últimas dos fotos de arriba). Yo de corte de 5 mm fuera de mi bowden tubo y se utiliza esta. El teflón es muy resistente y de baja fricción en el material perfecto para su uso aquí.
Lista de Materiales:
- ~430 g de filamento
- M3 varios tornillos
- tornillos autorroscantes
- 1x 100 mm de largo, 3 mm de varilla de acero inoxidable como eje de transmisión.
- 1x 623RS cojinete (623ZZ también está bien, pero el sello de goma del curso es mejor cuando el agua está involucrada)
- 1x 750mm de la varilla de empuje del servo de alambre
- 1x flexible acoplador para ir desde el motor al eje de transmisión. He utilizado 3 a 5 mm adaptador. La mayoría de 36mm de diámetro motores de uso de 5mm ejes. Yo recomendaría una articulación universal que se puede encontrar por $1-2 en aliexpress. Usted puede imprimir su propia junta universal directo o acoplador (ambos son imprimibles y se incluye en los archivos).
Electrónica:
- 2x servos 9g (1x si no optar por la reversión de la cubeta)
- 1x Motor + ESC
Voy a utilizar este motor: https://hobbyking.com/en_us/turnigy-xk3674-1900kv-brushless-inrunner.html
Y este ESC: https://hobbyking.com/en_us/hobbyking-120a-boat-esc-4a-ubec.html
Usted querrá elegir un motor/batería combo que ofrece hasta 20.000 rpm y puede manejar alrededor de ~75A continua. Se refieren a: https://www.kehrer-modellbau.de/en/kmb-jet28/jet-drives/kmb-jet28-rev.-3-with-short-steering-nozzle
Incluido en los archivos de soportes de montaje de 36 mm y 28 mm de diámetro inrunner motores así como un soporte para el común de los motores del avión utilizando 19mm espaciamiento del agujero. Si usted necesita un soporte para un motor diferente, que me haga saber las dimensiones y voy a hacer una para usted.
- 2x baterías lipo. Usted querrá dos: uno para colocar en cualquier lado del motor para mantener el equilibrio. Voy a utilizar 2x 2200mAh 3S lipo baterías. Me gusta usar velcro para mantener las baterías en su lugar.
- 1x transmisor/receptor de conjunto. Voy a usar mis Flysky i6 transmisor con el receptor de la
Si usted tiene alguna pregunta, por favor pregunte. Como se señaló en la parte superior de la página con un enlace, ahora hay una mejora de la nueva versión publicada.