Raptor reloaded by e-nable 3D for print

















4375 Views 0 Likes 0 Downloads Download
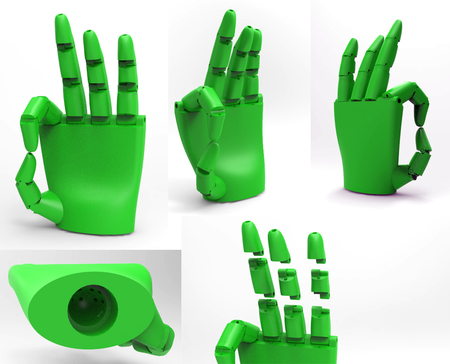
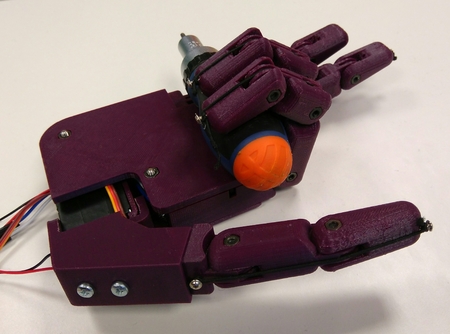
The Raptor Reloaded is an updated release of the original that incorporates feedback from the e-NABLE community ...and has CAD design source files available in STEP, IGES, IPT, and F3D formats.
Updates in the 12-17-14 release include:
--Improved print-ability due to custom modeled supports
--Cyborg Beast compatible sizing
--Improved dovetail geometry
--New tensioner retention clip
--Easier to use tensioner pins
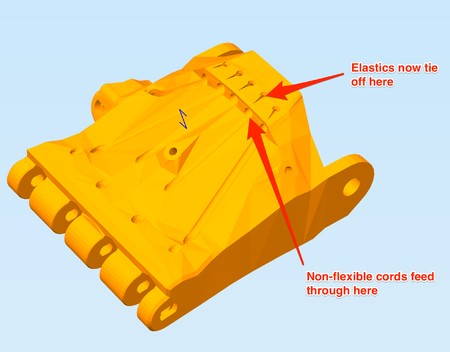
--Low profile elastics with two tie-off options
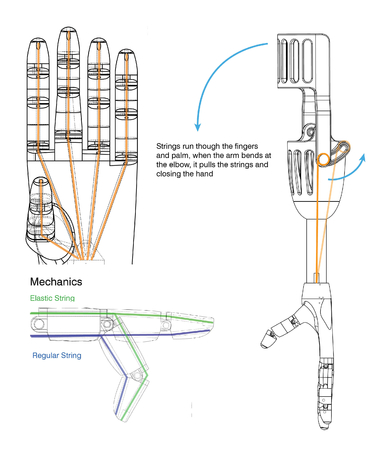
--More access to elastic and flexsor routing channels
--Debossed versioning information on palm and gauntlet
--Slimmer, more anthropomorhpic fingers
--Narrower knuckle block
--More intuitive assembly (new one-way proximals)
--Thorough documentation and modular design
--Source files in native Fusion 360 format, also STEP and IGES
--Additional velcro-mounting options as well as traditional velcro loop and leather options
--Re-oriented snap-pin head recesses to improve printability
--Knuckle pins are now removable, making the hand easy to repair and upgrade
--Strengthened tie-bars on finger tips
Native CAD source files available here:
Full Assembly
Left Palm
Right Palm
Gauntlet
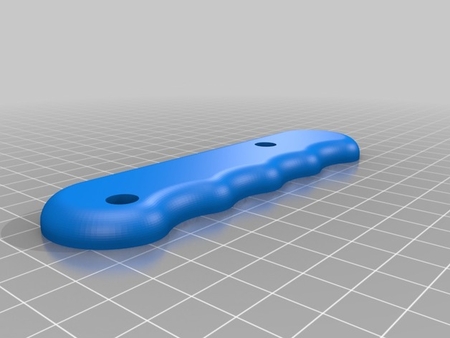
Proximal Phalange
Fingertip
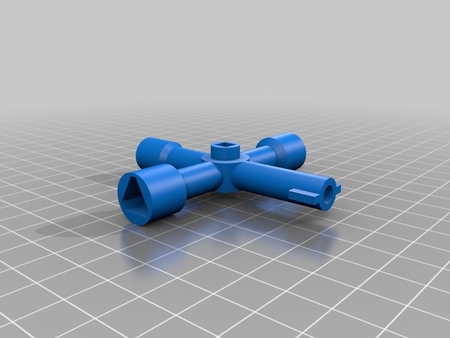
Finger Snap Pin
Detailed assembly instructions available at bit.ly/RaptorReloaded
Scale all parts as needed (the Raptor Hand is designed to work at scales from 100% through 170%)
At 100%, the inside of the... palm area measures 55mm
Measure across the widest part of the palm, then add 5mm for padding, then divide by 55 to get the scaling factor (for example, if the palm is 65mm wide, then 65 + 5 = 70, and 70 / 55 = 1.27 - so your scaling multiplier would be 1.27 or 127%)
Print without supports (palm and gauntlet have some supports built into the model)
PLA is recommended
Suggested settings are 0.2mm layer height, 35% infill, 2 outlines
Refer to file names for part descriptions. The number in square brackets at the end of each file name indicates how many copies of that STL file need to be printed for a complete hand assembly.
A video tutorial for the assembly process can be found here: http://youtu.be/5HVwC3RnWXk
Assembling a Raptor Hand requires the following materials:
(4 feet) Velcro, double-sided (2” wide)
(8 feet) Non-elastic nylon cord, 0.9mm
(5 feet) Flexible elastic cord
(5) Tensioner screws
(3) Palm velcro attachment screws with stop nuts
(12 inches) Firm Foam Padding (5 ¾” wide)
(5) Lee Tippi Micro Gel Fingertip Grips (optional)
All of the parts needed for assembly can be found easily in most areas, but if you prefer to get everything in one place, 3D Universe offers kits with all of the assembly materials needed for producing a Raptor Hand: http://shop3duniverse.com/collections/3d-printable-kits/products/raptor-hand-by-e-nable-assembly-materials-kit
Designer
https://www.youmagine.com/e-nable--2/designs3d model description
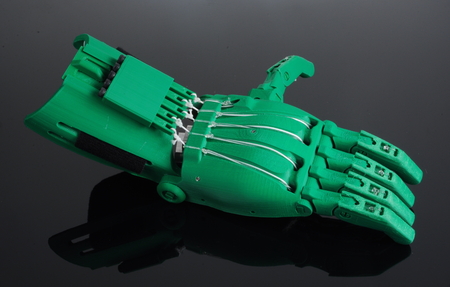
The latest in the Raptor Hand seriesThe Raptor Reloaded is an updated release of the original that incorporates feedback from the e-NABLE community ...and has CAD design source files available in STEP, IGES, IPT, and F3D formats.
Updates in the 12-17-14 release include:
--Improved print-ability due to custom modeled supports
--Cyborg Beast compatible sizing
--Improved dovetail geometry
--New tensioner retention clip
--Easier to use tensioner pins
--Low profile elastics with two tie-off options
--More access to elastic and flexsor routing channels
--Debossed versioning information on palm and gauntlet
--Slimmer, more anthropomorhpic fingers
--Narrower knuckle block
--More intuitive assembly (new one-way proximals)
--Thorough documentation and modular design
--Source files in native Fusion 360 format, also STEP and IGES
--Additional velcro-mounting options as well as traditional velcro loop and leather options
--Re-oriented snap-pin head recesses to improve printability
--Knuckle pins are now removable, making the hand easy to repair and upgrade
--Strengthened tie-bars on finger tips
Native CAD source files available here:
Full Assembly
Left Palm
Right Palm
Gauntlet
Proximal Phalange
Fingertip
Finger Snap Pin
Detailed assembly instructions available at bit.ly/RaptorReloaded
3d model print parameters
Printing instructions:Scale all parts as needed (the Raptor Hand is designed to work at scales from 100% through 170%)
At 100%, the inside of the... palm area measures 55mm
Measure across the widest part of the palm, then add 5mm for padding, then divide by 55 to get the scaling factor (for example, if the palm is 65mm wide, then 65 + 5 = 70, and 70 / 55 = 1.27 - so your scaling multiplier would be 1.27 or 127%)
Print without supports (palm and gauntlet have some supports built into the model)
PLA is recommended
Suggested settings are 0.2mm layer height, 35% infill, 2 outlines
Refer to file names for part descriptions. The number in square brackets at the end of each file name indicates how many copies of that STL file need to be printed for a complete hand assembly.
A video tutorial for the assembly process can be found here: http://youtu.be/5HVwC3RnWXk
Assembling a Raptor Hand requires the following materials:
(4 feet) Velcro, double-sided (2” wide)
(8 feet) Non-elastic nylon cord, 0.9mm
(5 feet) Flexible elastic cord
(5) Tensioner screws
(3) Palm velcro attachment screws with stop nuts
(12 inches) Firm Foam Padding (5 ¾” wide)
(5) Lee Tippi Micro Gel Fingertip Grips (optional)
All of the parts needed for assembly can be found easily in most areas, but if you prefer to get everything in one place, 3D Universe offers kits with all of the assembly materials needed for producing a Raptor Hand: http://shop3duniverse.com/collections/3d-printable-kits/products/raptor-hand-by-e-nable-assembly-materials-kit