Ada robotic hand 3D for print














7568 Views 6 Likes 1 Downloads Download
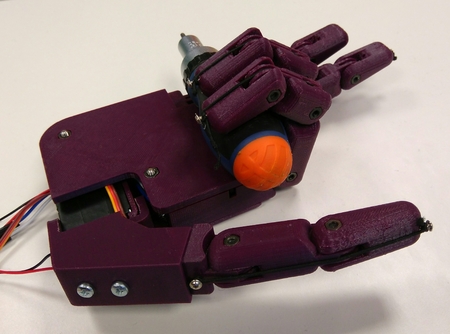
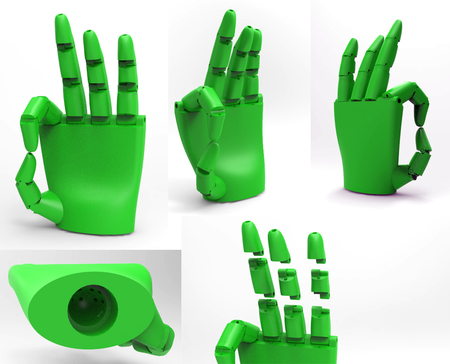
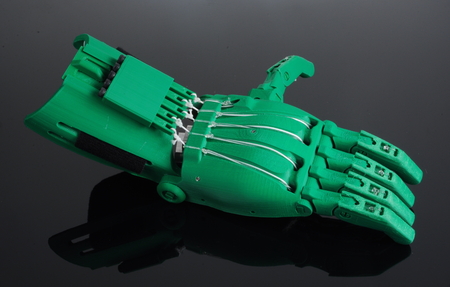
This is t...he Ada robotic hand from Open Bionics (www.openbionics.com), a fully 3D printable robotic hand, derived from the Dextrus robotic hand by the Open Hand Project .This hand design is completely open source and free for you to download and use.
All of the components required for a right hand start with 'R' and the components for a left hand start with 'L'.
A single hand requires the following 3D printed components:
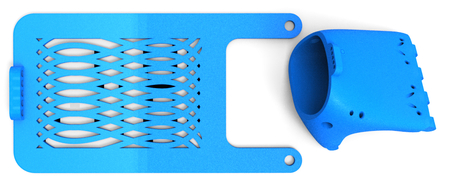
- Palm - Ninjaflex
- Back Cover - PLA/ABS
- PCB Tray Upper - PLA/ABS
- PCB Tray Lower - PLA/ABS
Non-3D printed components:
- 9 x M3 bolts (6mm length)
- 13 x M3 threaded push inserts
- 1m x 0.7mm tendon string
- 5 x Firgelli 12V linear actuators (PQ12-30-12-P)
- 1 x Open Bionics Almond electronics
- 5 x Micro gel fingertip grips]
- Super glue
(All of the above components are available from www.openbionics.com/shop)
Version History
16/02/16 - Ada V1.1
A step was added on the dorsal (back) side of the proximal finger joints. This "absorbs" the impact of any top layer curling during printing, protecting the joints. This should prevent any hands printing with floppy fingers on un-optimised machines.
02/02/16 - Ada V1.0
Initial release of the Ada hand
For assembly instructions and a guide on installing the firmware, we have written a few tutorials (www.openbionics.com/tutorials).
This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License (http://creativecommons.org/licenses/by-sa/4.0/)
- 9 x M3 bolts (6mm length)
- 13 x M3 threaded push inserts
- 1m x 0.7mm tendon string
- 5 x Firgelli 12V linear actuat...ors (PQ12-30-12-P)
- 1 x Open Bionics Almond electronics
- 5 x Micro gel fingertip grips
- Super glue
(All of the above components can be sourced from www.openbionics.com/shop)
Designer
Open Bionics3d model description
The Ada robotic hand from Open Bionics, a fully 3D printable robotic hand, derived from the Dextrus robotic hand by the Open Hand Project .This is t...he Ada robotic hand from Open Bionics (www.openbionics.com), a fully 3D printable robotic hand, derived from the Dextrus robotic hand by the Open Hand Project .This hand design is completely open source and free for you to download and use.
All of the components required for a right hand start with 'R' and the components for a left hand start with 'L'.
A single hand requires the following 3D printed components:
- Palm - Ninjaflex
- Back Cover - PLA/ABS
- PCB Tray Upper - PLA/ABS
- PCB Tray Lower - PLA/ABS
Non-3D printed components:
- 9 x M3 bolts (6mm length)
- 13 x M3 threaded push inserts
- 1m x 0.7mm tendon string
- 5 x Firgelli 12V linear actuators (PQ12-30-12-P)
- 1 x Open Bionics Almond electronics
- 5 x Micro gel fingertip grips]
- Super glue
(All of the above components are available from www.openbionics.com/shop)
Version History
16/02/16 - Ada V1.1
A step was added on the dorsal (back) side of the proximal finger joints. This "absorbs" the impact of any top layer curling during printing, protecting the joints. This should prevent any hands printing with floppy fingers on un-optimised machines.
02/02/16 - Ada V1.0
Initial release of the Ada hand
For assembly instructions and a guide on installing the firmware, we have written a few tutorials (www.openbionics.com/tutorials).
This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License (http://creativecommons.org/licenses/by-sa/4.0/)
3d model print parameters
Non-3D printed components:- 9 x M3 bolts (6mm length)
- 13 x M3 threaded push inserts
- 1m x 0.7mm tendon string
- 5 x Firgelli 12V linear actuat...ors (PQ12-30-12-P)
- 1 x Open Bionics Almond electronics
- 5 x Micro gel fingertip grips
- Super glue
(All of the above components can be sourced from www.openbionics.com/shop)