Refrigerador rover en 3D para imprimir



1657 Visualizaciones 0 Me gusta 0 Descargas Descarga
https://youtu.be/IzrAztJ-se8
https://youtu.be/SdlJh3FiCNA
...
consigue un nuevo par de zapatos (magnéticos)! Bueno para escalar montañas ferrosas (o la mayoría de los refrigeradores)!
En cualquier caso,... los nietos están fascinados con él!
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que viene muchos errores.
Diseñado usando FreeCAD, cortado usando Ultimaker Cura 4.7.0, e impreso en 3D en PLA en Ultimaker S5s.
Parte.
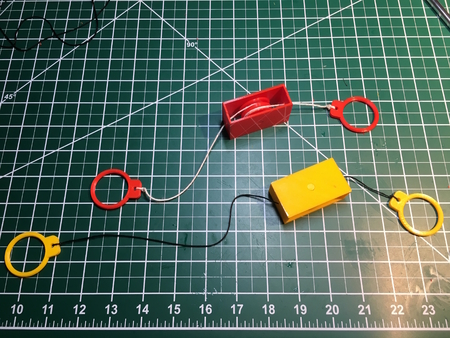
Comprar las siguientes partes:
* Una batería de litio de 3.7 vdc 100ma (https://www.adafruit.com/product/1570) y cargador.
* Un cable de 2 pines JST PH (https://www.adafruit.com/product/3814).
* Un motor de engranaje N20 6VDC 100RPM (en línea).
* Cuatro imanes de neodimio de 8 mm (diámetro) por 3 mm (grosor).
Imprimí en 3D las siguientes partes en .altura de la capa de 15m m, relleno del 20% :
* Six " Arm.stl".
* Eje De Dos", Montaje Magnético.stl"
* Cuatro " Eje, Lateral.stl".
* Tres " Eje.stl".
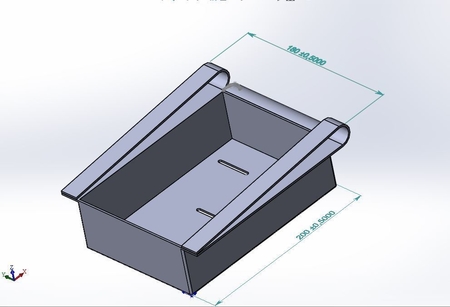
* Una " Base.stl".
* Six " Bolt, Axle.stl".
* Un " Engranaje, Eje.stl".
* Un " Engranaje, Motor.stl".
* Montaje Magnético de Dos ".stl".
* Dos " Lado, Diente de sierra.stl".
Antes del montaje, pruebo el ajuste y el corte, el archivado, el taladrado, el lijado, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario recortar, archivar, taladrar y/o lijar más o menos. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos.
Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
El mecanismo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1) para la limpieza de roscas.
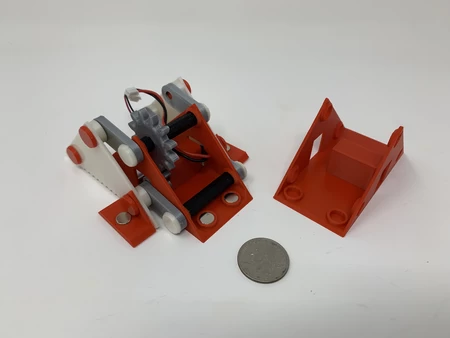
Asamblea.
Para montar el mecanismo, realicé los siguientes pasos:
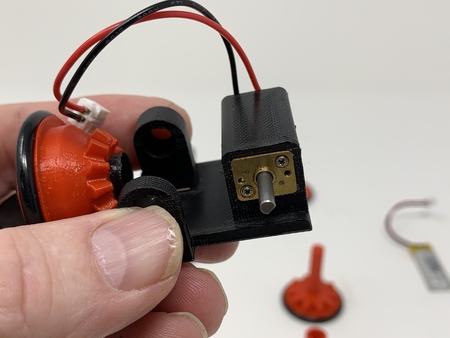
* Posicionado " Engranaje, Motor.stl " en " Base.stl", luego presionó el motor en la base y el engranaje.
* Presionado " Engranaje, Eje.stl "en uno de" Eje.stl".
* Soldó el conector JST al motor de tal manera que el eje del motor giró en sentido contrario a las agujas del reloj cuando se ve desde el extremo del eje del motor.
* Presiona dos imanes de neodimio en los bolsos magnéticos en el conjunto base.
* Posicionado el conjunto del eje en el conjunto de base, luego asegurado en su lugar con dos " Brazo.stl "y dos" Perno, Eje.stl".
* Posicionado el segundo eje en el conjunto de base y luego asegurado en su lugar con dos " Brazo.stl" and two " Bolt.stl".
* Posicionado el tercer eje en el conjunto de base y luego asegurado en su lugar con dos " Brazo.stl" and two " Bolt.stl".
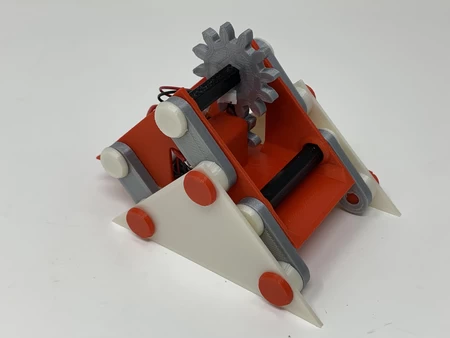
* Se adjunta un " Imán de montaje.stl "a un lado", Diente de Sierra.stl " usando un pequeño punto de pegado de cianoacrilato, asegurándose de que el orificio del eje en el soporte del imán esté alineado con el orificio del eje en el lado, luego presionó un imán de neodimio en el bolsillo del imán del soporte del imán.
* Repitió el paso anterior para el montaje y el lado restantes del imán.
* Se adjunta un conjunto lateral a los brazos de montaje base en un lado utilizando dos " Eje, Lado.stl "y un" Eje, Montaje Magnético.stl".
* Repitió el paso anterior para el conjunto lateral restante.
* Aseguró la batería al conjunto de base usando cinta de doble cara.
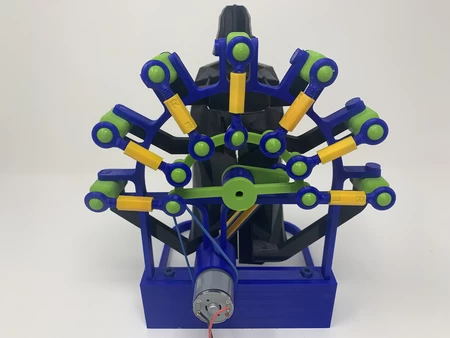
Después del montaje, simplemente conecté el conector JST al conector de la batería, coloqué el mecanismo en el refrigerador, ¡y de él subí!
Y así es como imprimí y ensamblé en 3D "Refrigerador Rover".
Espero que te haya gustado!
Diseñador
Greg ZumwaltDescripción del modelo 3d
Un mecanismo de escalada de refrigerador frontal ferroso.https://youtu.be/IzrAztJ-se8
https://youtu.be/SdlJh3FiCNA
...
Parametros de impresión 3d
consigue un nuevo par de zapatos (magnéticos)! Bueno para escalar montañas ferrosas (o la mayoría de los refrigeradores)!
En cualquier caso,... los nietos están fascinados con él!
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que viene muchos errores.
Diseñado usando FreeCAD, cortado usando Ultimaker Cura 4.7.0, e impreso en 3D en PLA en Ultimaker S5s.
Parte.
Comprar las siguientes partes:
* Una batería de litio de 3.7 vdc 100ma (https://www.adafruit.com/product/1570) y cargador.
* Un cable de 2 pines JST PH (https://www.adafruit.com/product/3814).
* Un motor de engranaje N20 6VDC 100RPM (en línea).
* Cuatro imanes de neodimio de 8 mm (diámetro) por 3 mm (grosor).
Imprimí en 3D las siguientes partes en .altura de la capa de 15m m, relleno del 20% :
* Six " Arm.stl".
* Eje De Dos", Montaje Magnético.stl"
* Cuatro " Eje, Lateral.stl".
* Tres " Eje.stl".
* Una " Base.stl".
* Six " Bolt, Axle.stl".
* Un " Engranaje, Eje.stl".
* Un " Engranaje, Motor.stl".
* Montaje Magnético de Dos ".stl".
* Dos " Lado, Diente de sierra.stl".
Antes del montaje, pruebo el ajuste y el corte, el archivado, el taladrado, el lijado, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario recortar, archivar, taladrar y/o lijar más o menos. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos.
Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
El mecanismo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1) para la limpieza de roscas.
Asamblea.
Para montar el mecanismo, realicé los siguientes pasos:
* Posicionado " Engranaje, Motor.stl " en " Base.stl", luego presionó el motor en la base y el engranaje.
* Presionado " Engranaje, Eje.stl "en uno de" Eje.stl".
* Soldó el conector JST al motor de tal manera que el eje del motor giró en sentido contrario a las agujas del reloj cuando se ve desde el extremo del eje del motor.
* Presiona dos imanes de neodimio en los bolsos magnéticos en el conjunto base.
* Posicionado el conjunto del eje en el conjunto de base, luego asegurado en su lugar con dos " Brazo.stl "y dos" Perno, Eje.stl".
* Posicionado el segundo eje en el conjunto de base y luego asegurado en su lugar con dos " Brazo.stl" and two " Bolt.stl".
* Posicionado el tercer eje en el conjunto de base y luego asegurado en su lugar con dos " Brazo.stl" and two " Bolt.stl".
* Se adjunta un " Imán de montaje.stl "a un lado", Diente de Sierra.stl " usando un pequeño punto de pegado de cianoacrilato, asegurándose de que el orificio del eje en el soporte del imán esté alineado con el orificio del eje en el lado, luego presionó un imán de neodimio en el bolsillo del imán del soporte del imán.
* Repitió el paso anterior para el montaje y el lado restantes del imán.
* Se adjunta un conjunto lateral a los brazos de montaje base en un lado utilizando dos " Eje, Lado.stl "y un" Eje, Montaje Magnético.stl".
* Repitió el paso anterior para el conjunto lateral restante.
* Aseguró la batería al conjunto de base usando cinta de doble cara.
Después del montaje, simplemente conecté el conector JST al conector de la batería, coloqué el mecanismo en el refrigerador, ¡y de él subí!
Y así es como imprimí y ensamblé en 3D "Refrigerador Rover".
Espero que te haya gustado!