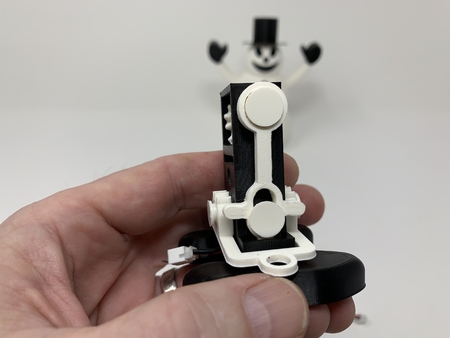
Ultimaker robot "pin walker". en 3D para imprimir
























4416 Visualizaciones 0 Me gusta 0 Descargas Descarga
En Youtube un seguidor me sugirió que el diseño de un "pin walker" mecanismo, que yo nunca había visto n...i oído hablar, así que él me dirigió a la RobotHut sitio web y yo estaba tan intrigado que inmediatamente empezar a diseñar un pin walker mecanismo. Después de diseñar el mecanismo, ya que el uso de impresoras 3D Ultimaker me decidí a completar el modelo de uso de la Ultimaker Robot como el cuerpo para Ultimaker Robot "Pin Walker".
Como de costumbre, probablemente olvidó de un archivo o dos o quién sabe qué otra cosa, así que si usted tiene alguna pregunta, por favor no dude en preguntar como puedo hacer hacer un montón de errores.
Diseñado utilizando Autodesk Fusion 360, rodajas de uso de Cura 4.2, e impresas en PLA en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendida.
Una nota final, yo no reciben compensación alguna por las partes y/o materiales utilizados en este modelo.
Compra, Imprimir y Preparar las Piezas.>/b>
He utilizado los siguientes materiales:
• Espesor de cianoacrilato.
• Cianoacrilato acelerante.
• La luz de aceite de máquina.
• La soldadura.
• Cinta adhesiva de doble cara.
Este modelo utiliza la siguiente no impreso en 3D de las piezas:
• Uno de 3,7 vdc 100 ma de la Batería de Litio (https://www.adafruit.com/product/1570).
• Una JST PH de 2-Pin Cable (https://www.adafruit.com/product/3814).
• Una N20 6VCD 150RPM motor de engranajes.
• Un micro interruptor (Uxcell a12013100ux0116 Alto Mando 3P 2 Posición 1P2T SPDT Vertical, Deslice el Interruptor, 0.5 Amp, 50V DC, 50 Pieza, 3 mm).
Usted también necesitará un adecuado cargador de la batería.
Para el 3D de piezas impresas, he incluido el archivo "Impreso en 3D de las Piezas.pdf" que contiene los nombres de las piezas, el conde, altura de capa, de relleno y soporte de configuración para el 3D de las piezas impresas.
Esta es una alta precisión de la impresión y el modelo de ensamblaje utilizando a veces piezas muy pequeñas y en espacios muy reducidos. Antes del montaje, compruebe el ajuste y recorte, archivo, arena, etc. todas las piezas que sean necesarias para el movimiento suave de las superficies en movimiento, y ajuste apretado para no mover las superficies. Dependiendo de la impresora, la configuración de la impresora y los colores que elegiste, más o menos cortar, limar y/o lijado puede ser requerido. Cuidadosamente todos los bordes que estaban en contacto con la placa de construcción para hacer absolutamente seguro de que todos placa de construcción "cieno" es retirado y que todos los bordes son lisos. He utilizado los pequeños joyeros archivos y un montón de paciencia para realizar este paso.
El modelo también utiliza rosca de montaje, así que he usado un toque y morir conjunto de 6mm (1) para la limpieza de roscas.
He utilizado un pequeño punto de espesor cianoacrilato, el cuerpo, la sección trasera del cuerpo de la sección delantera, asegure el cableado de la base y asegurar los hilos, si es necesario.
Yo también utiliza la luz de la máquina de aceite para la lubricación de los engranajes y ejes.
Conectar el robot del motor y el interruptor de encendido/apagado, he realizado lo...s siguientes pasos:
• Cortar los cables en el conector JST a 40 mm de longitud, a continuación, pelado y estañado los extremos.
• Soldar el cable negro del conector JST del motor "-" terminal.
• Soldar el cable rojo del conector JST a uno en el exterior de la terminal del conmutador.
• Soldar un cable rojo desde el centro de la clavija del interruptor del motor "+" de la terminal.
Después de cableado, he conectado el conector JST la batería y operado el interruptor para encender el motor encendido y apagado.
Ensamble la Base.
Para ensamblar la base, he realizado los siguientes pasos:
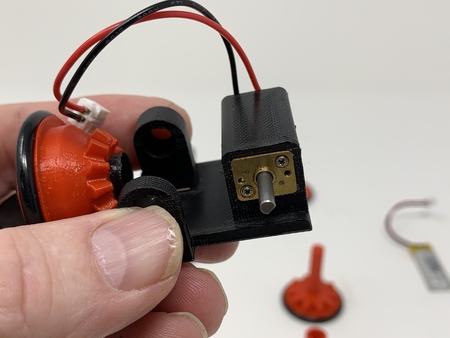
• Pulsa el motor de engranaje en la "Base.stl" de manera tal que el eje del motor fue de 3 mm por encima del engranaje del motor de la placa.
• Pulsa "Piñón, Corona, Motor.stl" sobre el eje motor.
• Posicionado "Piñón, Corona, Eje.stl" dentro de la base de la asamblea sobre el pequeño agujero del eje.
• Deslizó el más largo hexagonal del eje de "Eje.stl" en la base de montaje más grande agujero del eje.
• Pulsa el largo hexagonal eje a través de los engranajes del eje y el más pequeño agujero del eje en la base de montaje.
• Pulsa uno "de la Cam.stl" en el eje y girar el tren de engranajes tal que la cam era en su parte más alta posición.
• Pulsa el resto "de la Cam.stl" en el otro extremo del eje tal que la cam estaba en su punto más bajo (posición de 180 grados desde el primer cam).
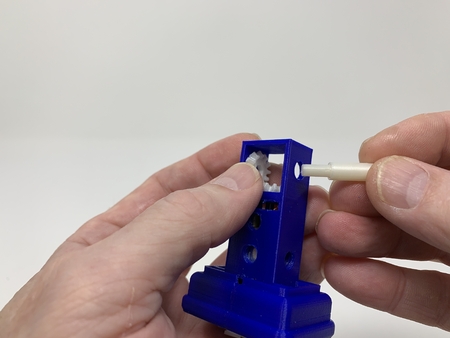
• Deslizó una "Pata.stl" en el ensamblaje de la base y se coloca el anillo de levas encima de la cam, y luego se fija en su lugar con una "Eje de la Pierna.stl".
• Deslizó el resto "de la Pierna.stl" en el ensamblaje de la base y se coloca el anillo de levas encima de la cam, y luego se fija en su lugar con el resto de "Eje de la Pierna.stl".
• Posicionado "Subibaja.stl" en la parte superior del agujero roscado en la base de montaje, a continuación, se fija en su lugar con el "Eje de Balancín.stl".
• Presiona el conector de la batería entre el robot pie y la carcasa del motor sobre la base de montaje a continuación se fija la batería para el ensamblaje de la base utilizando cinta adhesiva de doble cara.
En este punto, he conectado el motor a una fuente de alimentación con el fin de probar la asamblea. Yo lubricado y es operado la asamblea y observó el consumo de energía será de 18 a 20 ma.
Montaje Final.
Para el montaje final, he realizado los siguientes pasos:
• Girar el tren de engranajes hasta que el pedaleo era horizontal.
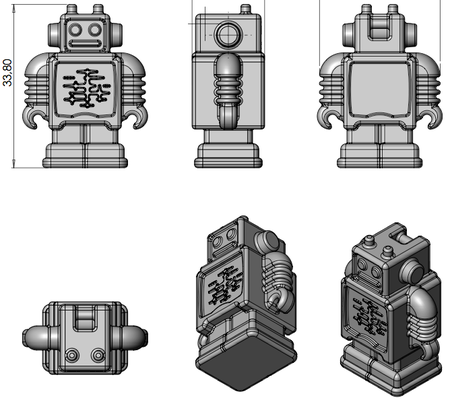
• Posicionado "Ultimaker Robot, De Frente.stl" (o "Ultimaker Robot, de Frente.3mf") en la parte inferior de agujero roscado en la parte frontal de la base de montaje, asegurándose de que los dientes de los engranajes en el robot frente comprometido con los dientes de los engranajes en el columpio, y luego se fija en su lugar con una "Eje del Cuerpo.stl".
• Posicionado "Ultimaker Robot, Parte Trasera.stl" en la parte inferior del agujero con rosca en la parte posterior del montaje de la base y luego se fija en su lugar con el resto de "Eje del Cuerpo.stl".
• Asegurado las dos mitades del cuerpo usando o un pequeño punto de pegamento de cianoacrilato o pequeñas tiras de cinta adhesiva de doble cara.
• Aseguró el interruptor para el interior del pie usando un pequeño punto de pegamento de cianoacrilato o una pequeña tira de cinta adhesiva de doble cara.
Y así es como lo tengo impreso y montado Ultimaker Robot "Pin Walker".
Espero que te haya gustado!
Diseñador
Greg ZumwaltDescripción del modelo 3d
La Ultimaker Robot en "Pin Walker" forma.En Youtube un seguidor me sugirió que el diseño de un "pin walker" mecanismo, que yo nunca había visto n...i oído hablar, así que él me dirigió a la RobotHut sitio web y yo estaba tan intrigado que inmediatamente empezar a diseñar un pin walker mecanismo. Después de diseñar el mecanismo, ya que el uso de impresoras 3D Ultimaker me decidí a completar el modelo de uso de la Ultimaker Robot como el cuerpo para Ultimaker Robot "Pin Walker".
Como de costumbre, probablemente olvidó de un archivo o dos o quién sabe qué otra cosa, así que si usted tiene alguna pregunta, por favor no dude en preguntar como puedo hacer hacer un montón de errores.
Diseñado utilizando Autodesk Fusion 360, rodajas de uso de Cura 4.2, e impresas en PLA en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendida.
Una nota final, yo no reciben compensación alguna por las partes y/o materiales utilizados en este modelo.
Compra, Imprimir y Preparar las Piezas.>/b>
He utilizado los siguientes materiales:
• Espesor de cianoacrilato.
• Cianoacrilato acelerante.
• La luz de aceite de máquina.
• La soldadura.
• Cinta adhesiva de doble cara.
Este modelo utiliza la siguiente no impreso en 3D de las piezas:
• Uno de 3,7 vdc 100 ma de la Batería de Litio (https://www.adafruit.com/product/1570).
• Una JST PH de 2-Pin Cable (https://www.adafruit.com/product/3814).
• Una N20 6VCD 150RPM motor de engranajes.
• Un micro interruptor (Uxcell a12013100ux0116 Alto Mando 3P 2 Posición 1P2T SPDT Vertical, Deslice el Interruptor, 0.5 Amp, 50V DC, 50 Pieza, 3 mm).
Usted también necesitará un adecuado cargador de la batería.
Para el 3D de piezas impresas, he incluido el archivo "Impreso en 3D de las Piezas.pdf" que contiene los nombres de las piezas, el conde, altura de capa, de relleno y soporte de configuración para el 3D de las piezas impresas.
Esta es una alta precisión de la impresión y el modelo de ensamblaje utilizando a veces piezas muy pequeñas y en espacios muy reducidos. Antes del montaje, compruebe el ajuste y recorte, archivo, arena, etc. todas las piezas que sean necesarias para el movimiento suave de las superficies en movimiento, y ajuste apretado para no mover las superficies. Dependiendo de la impresora, la configuración de la impresora y los colores que elegiste, más o menos cortar, limar y/o lijado puede ser requerido. Cuidadosamente todos los bordes que estaban en contacto con la placa de construcción para hacer absolutamente seguro de que todos placa de construcción "cieno" es retirado y que todos los bordes son lisos. He utilizado los pequeños joyeros archivos y un montón de paciencia para realizar este paso.
El modelo también utiliza rosca de montaje, así que he usado un toque y morir conjunto de 6mm (1) para la limpieza de roscas.
He utilizado un pequeño punto de espesor cianoacrilato, el cuerpo, la sección trasera del cuerpo de la sección delantera, asegure el cableado de la base y asegurar los hilos, si es necesario.
Yo también utiliza la luz de la máquina de aceite para la lubricación de los engranajes y ejes.
Parametros de impresión 3d
Alambre el Robot del Motor y el Interruptor De encendido/Apagado.Conectar el robot del motor y el interruptor de encendido/apagado, he realizado lo...s siguientes pasos:
• Cortar los cables en el conector JST a 40 mm de longitud, a continuación, pelado y estañado los extremos.
• Soldar el cable negro del conector JST del motor "-" terminal.
• Soldar el cable rojo del conector JST a uno en el exterior de la terminal del conmutador.
• Soldar un cable rojo desde el centro de la clavija del interruptor del motor "+" de la terminal.
Después de cableado, he conectado el conector JST la batería y operado el interruptor para encender el motor encendido y apagado.
Ensamble la Base.
Para ensamblar la base, he realizado los siguientes pasos:
• Pulsa el motor de engranaje en la "Base.stl" de manera tal que el eje del motor fue de 3 mm por encima del engranaje del motor de la placa.
• Pulsa "Piñón, Corona, Motor.stl" sobre el eje motor.
• Posicionado "Piñón, Corona, Eje.stl" dentro de la base de la asamblea sobre el pequeño agujero del eje.
• Deslizó el más largo hexagonal del eje de "Eje.stl" en la base de montaje más grande agujero del eje.
• Pulsa el largo hexagonal eje a través de los engranajes del eje y el más pequeño agujero del eje en la base de montaje.
• Pulsa uno "de la Cam.stl" en el eje y girar el tren de engranajes tal que la cam era en su parte más alta posición.
• Pulsa el resto "de la Cam.stl" en el otro extremo del eje tal que la cam estaba en su punto más bajo (posición de 180 grados desde el primer cam).
• Deslizó una "Pata.stl" en el ensamblaje de la base y se coloca el anillo de levas encima de la cam, y luego se fija en su lugar con una "Eje de la Pierna.stl".
• Deslizó el resto "de la Pierna.stl" en el ensamblaje de la base y se coloca el anillo de levas encima de la cam, y luego se fija en su lugar con el resto de "Eje de la Pierna.stl".
• Posicionado "Subibaja.stl" en la parte superior del agujero roscado en la base de montaje, a continuación, se fija en su lugar con el "Eje de Balancín.stl".
• Presiona el conector de la batería entre el robot pie y la carcasa del motor sobre la base de montaje a continuación se fija la batería para el ensamblaje de la base utilizando cinta adhesiva de doble cara.
En este punto, he conectado el motor a una fuente de alimentación con el fin de probar la asamblea. Yo lubricado y es operado la asamblea y observó el consumo de energía será de 18 a 20 ma.
Montaje Final.
Para el montaje final, he realizado los siguientes pasos:
• Girar el tren de engranajes hasta que el pedaleo era horizontal.
• Posicionado "Ultimaker Robot, De Frente.stl" (o "Ultimaker Robot, de Frente.3mf") en la parte inferior de agujero roscado en la parte frontal de la base de montaje, asegurándose de que los dientes de los engranajes en el robot frente comprometido con los dientes de los engranajes en el columpio, y luego se fija en su lugar con una "Eje del Cuerpo.stl".
• Posicionado "Ultimaker Robot, Parte Trasera.stl" en la parte inferior del agujero con rosca en la parte posterior del montaje de la base y luego se fija en su lugar con el resto de "Eje del Cuerpo.stl".
• Asegurado las dos mitades del cuerpo usando o un pequeño punto de pegamento de cianoacrilato o pequeñas tiras de cinta adhesiva de doble cara.
• Aseguró el interruptor para el interior del pie usando un pequeño punto de pegamento de cianoacrilato o una pequeña tira de cinta adhesiva de doble cara.
Y así es como lo tengo impreso y montado Ultimaker Robot "Pin Walker".
Espero que te haya gustado!