Colibríes. en 3D para imprimir





996 Visualizaciones 0 Me gusta 0 Descargas Descarga
https://youtu.be/2vsFSrN2SaA
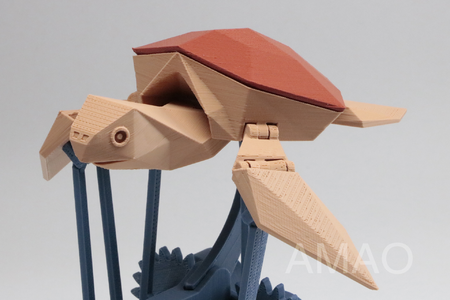
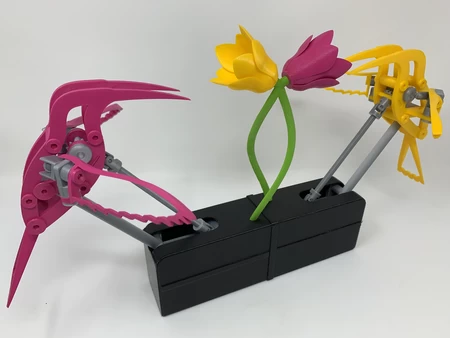
A mi esposa le encantan los colibríes, por lo que diseñé mi primer autómata de colibrí "Colibrí" (htt...ps://www.youmagine.com/designs/hummingbird) . ¿Qué podría ser mejor que tener un autómata de colibrí? ¿Por qué este doble colibrí autómata, "Colibríes", por supuesto!
Ensamblado con más de cien piezas impresas en 3D y tres piezas compradas, "Colibríes" es definitivamente un desafío para imprimir y ensamblar.
Y como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Diseñado con Autodesk Fusion 360, cortado con Cura 4.2 e impreso en PLA en un Ultimaker 2 + Extended y un Ultimaker 3 Extended.
He comprado las siguientes piezas:
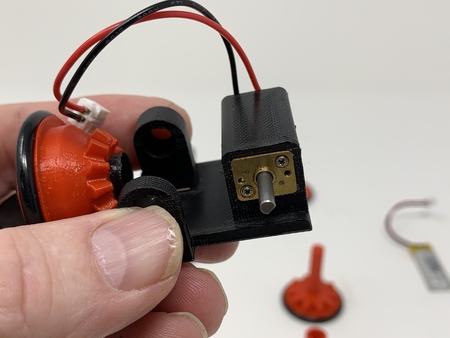
○ Motor de engranaje de 150 rpm (búsqueda de "uxcell DC 3V 150RPM Mi...cro Speed Reduction Motor Mini Caja de engranajes con 2 terminales para RC Car Robot Model DIY Engine Toy").
○ Una fuente de alimentación de 3vdc.
○ Un conector coaxial que se ajuste al conector de la fuente de alimentación (opcional).
El archivo incluido "Hummingbirds Part List" contiene los nombres de las piezas, cantidades, alturas de capa y configuración de relleno de las piezas impresas en 3D necesarias para este modelo.
"Colibríes" es un modelo de impresión y montaje de alta precisión. Antes del montaje, pruebe el ajuste y el ajuste, el limado, la arena, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
"Colibríes" también utiliza ensamble roscado, por lo que utilicé un grifo de 6 mm by1 y un troquel para la limpieza de roscas.
Reúne a los Colibríes.
https://www.youtube.com/watch?v=AWzwdxY4i3w
Monté el colibrí derecho (magenta en la imagen de la portada) de la siguiente manera:
○ Ensamblado las seis juntas universales como se muestra en el video incluido (cinco como se muestra en el video, la sexta usando "Engranaje, Yugo, Unidad (Módulo 1.1, Dientes 20.stl").
○ Presionado un " Perno, Engranaje, Corona.engranaje stl "en uno", Corona (Módulo 1.5, dientes 12).stl".
○ Deslizó el conjunto de engranaje de tornillo y corona en un " Espaciador, plano.stl", luego asegurado en su lugar con un conjunto de yugo asegurándose de que el conjunto girara libremente.
○ Presionado un " Engranaje, Corona (Módulo 1.5, dientes 12).stl "en un" Eje, Ruedas.stl " alineando cuidadosamente el engranaje con la estría del eje.
○ Posicionado el eje y el conjunto de engranajes de corona en un " Cuerpo, a la derecha.stl", con el engranaje adyacente al cuerpo.
○ Presionó el conjunto de yugo en el cuerpo.
○ Presionado " Cuerpo, Izquierda.stl" en la asamblea.
○ Roscado de dos " Rueda, RHT.stl " en las roscas del conjunto del engranaje del eje y de la corona y alineó las juntas de rótula.
○ Posicionado y asegurado en su lugar cuatro " Espaciador, Redondo.stl "en el conjunto del cuerpo usando ocho" Perno, 6mm, hombre de 3.8 mm. stl".
○ Colocado un "" Pivote, Hombre.stl" en uno " Pivote, Ala.stl "luego asegurado en su lugar con un" Perno Pivote Ala.stl " asegurándose de que el conjunto girara libremente.
○ Asegurado un " Ala, Derecha.stl "en el conjunto del hombre usando un" Perno, 6mm, hombre de 2.8 mm. stl".
○ Se rompió un extremo del " Agujero de conexión de 6,3 mm de varilla.stl " en la bola del conjunto del ala.
○ Posicionado el conjunto de alas en el hombre del lado derecho del cuerpo y luego asegurado en su lugar con un " Perno, 6 mm, 4,4 mm Hombre.stl".
○ Encajó el extremo restante de la biela en la bola de la rueda a la derecha y luego se aseguró de que el conjunto girara libremente.
○ Repitió los pasos de montaje del ala izquierda.
○ Roscado un " Eje, Unidad.stl " en el extremo libre de la junta universal.
○ Roscado un conjunto de unión universal en el extremo libre del eje motriz.
○ Posicionado una " Cola.stl "entre los marcos y asegurado en su lugar con dos" Negrita, 6 mm, 4,4 mm Hombre.stl".
Monté el colibrí izquierdo (amarillo en la imagen de la cubierta) como lo hice con el derecho, con la excepción de invertir la orientación del eje y el conjunto de la corona de modo que el engranaje esté adyacente al cuerpo izquierdo (por ejemplo, una imagen de espejo "pico a pico").
Monta la Base.
Monté la base como sigue:
○ Cableado el motor al conector coaxial (opcional) de tal manera que el eje del motor gira en el sentido de las agujas del reloj cuando se ve desde el extremo del eje del motor del motor.
○ Presionado el motor en " Base.stl".
○ Aseguró el cable coaxial al conjunto de base usando la tuerca incluida.
○ Engranaje presionado, Motor (Módulo 1.1, Dientes 10).stl " en el eje del motor.
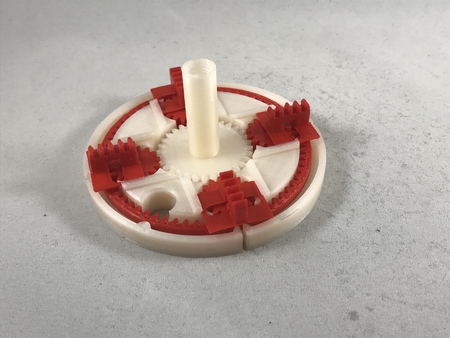
○ Posicionado un " Engranaje, Yugo, Unidad (Módulo 1.1, Dientes 20).stl " montaje (montado en el paso anterior) en el conjunto de base y roscado un "Acoplador, 18mm.stl" en las roscas de engranajes.
○ Engranaje roscado, Gusano.stl" en el acoplador.
○ Roscado un "acoplador, 4,4 mm. stl" en el extremo libre del conjunto de yugo engranado.
○ Roscado el acoplador " restante.stl " en el engranaje de gusano.
○ Roscado un conjunto de yugo en el acoplador.
○ Roscado un " acoplador, 4mm. stl en el extremo libre de la asamblea del yugo.
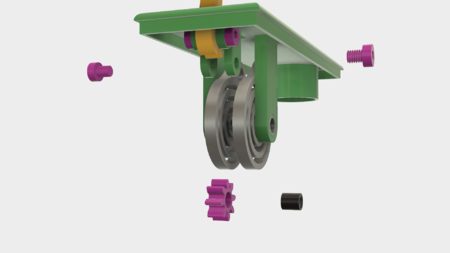
○ Posicionado " Engranaje.stl "en el conjunto de base luego asegurado en su lugar con un "Perno, 6 mm, hombre de 4,4 mm. stl".
○ Asegurado un " Brazo, Engranaje.stl "onto" Brazo.stl "usando un" Perno, 6mm, hombre de 4.4 mm. stl".
○ Aseguró este conjunto de brazo en el extremo izquierdo del conjunto de base con dos "Perno, 6 mm, hombre de 4,4 mm. stl" asegurándose de que el brazo girara libremente.
○ Asegurado el resto " Brazo, Engranaje.stl" onto " Brazo, Offset.stl "(en la cara exterior del brazo desplazado) usando un "Perno, 6 mm, hombre de 4,4 mm. stl".
○ Aseguró este conjunto de brazo en el extremo derecho del conjunto de base usando dos "Perno, 6 mm, hombre de 4,4 mm. stl" asegurándose de que el brazo girara libremente.
○ Aseguró los extremos libres de cada brazo del engranaje al engranaje usando un " Eje, Brazo, Engranaje.stl".
○ Aplicó potencia al motor y permitió que el brazo izquierdo viajara hasta el límite más bajo, luego eliminó la potencia.
○ Cubierta deslizada, Izquierda.stl "sobre el extremo libre del brazo izquierdo, lo deslizó en su posición, luego se aseguró en su lugar con cuatro "Perno, 6 mm, hombre de 3,8 mm. stl".
○ Aplicó potencia al motor y permitió que el brazo derecho viajara hasta el límite más bajo, luego eliminó la potencia.
○ Cubierta deslizada, Derecha.stl "sobre el extremo libre del brazo derecho, lo deslizó en su posición, luego se aseguró en su lugar con cuatro" Perno, 6 mm, hombre de 3,8 mm. stl".
○ Cubierta deslizada, Izquierda.stl "sobre el extremo libre del brazo izquierdo, lo deslizó en su posición, luego se aseguró en su lugar con cuatro "Perno, 6 mm, hombre de 3,8 mm. stl".
Montaje Final.
Para el montaje final, realicé los siguientes pasos.
○ Posicionado el conjunto de pájaro izquierdo (amarillo en la imagen de la cubierta) en el brazo izquierdo y asegurado en su lugar con dos "Perno, 6mm, 4.4 mm Hombre.stl".
○ Enrosque el yugo izquierdo del pájaro en el acoplador izquierdo de la base.
○ Posicionado el conjunto de pájaro derecho (magenta en la imagen de la cubierta) en el brazo derecho y asegurado en su lugar con dos "Perno, 6mm, 4.4 mm Hombre.stl".
○ Enrosque el yugo derecho del pájaro en el acoplador derecho de la base.
○ Presionado la flor de dos".stl" onto " Stems.stl " tal que los pétalos más largos estaban alineados verticalmente.
○ Presionó el conjunto de la flor y el tallo en la base.
Y así es como imprimí y ensamblé "Colibríes".
Espero que te haya gustado!
Diseñador
Greg ZumwaltDescripción del modelo 3d
Colibríes.https://youtu.be/2vsFSrN2SaA
A mi esposa le encantan los colibríes, por lo que diseñé mi primer autómata de colibrí "Colibrí" (htt...ps://www.youmagine.com/designs/hummingbird) . ¿Qué podría ser mejor que tener un autómata de colibrí? ¿Por qué este doble colibrí autómata, "Colibríes", por supuesto!
Ensamblado con más de cien piezas impresas en 3D y tres piezas compradas, "Colibríes" es definitivamente un desafío para imprimir y ensamblar.
Y como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Diseñado con Autodesk Fusion 360, cortado con Cura 4.2 e impreso en PLA en un Ultimaker 2 + Extended y un Ultimaker 3 Extended.
Parametros de impresión 3d
Compra, Imprime y Prepara las Piezas.He comprado las siguientes piezas:
○ Motor de engranaje de 150 rpm (búsqueda de "uxcell DC 3V 150RPM Mi...cro Speed Reduction Motor Mini Caja de engranajes con 2 terminales para RC Car Robot Model DIY Engine Toy").
○ Una fuente de alimentación de 3vdc.
○ Un conector coaxial que se ajuste al conector de la fuente de alimentación (opcional).
El archivo incluido "Hummingbirds Part List" contiene los nombres de las piezas, cantidades, alturas de capa y configuración de relleno de las piezas impresas en 3D necesarias para este modelo.
"Colibríes" es un modelo de impresión y montaje de alta precisión. Antes del montaje, pruebe el ajuste y el ajuste, el limado, la arena, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
"Colibríes" también utiliza ensamble roscado, por lo que utilicé un grifo de 6 mm by1 y un troquel para la limpieza de roscas.
Reúne a los Colibríes.
https://www.youtube.com/watch?v=AWzwdxY4i3w
Monté el colibrí derecho (magenta en la imagen de la portada) de la siguiente manera:
○ Ensamblado las seis juntas universales como se muestra en el video incluido (cinco como se muestra en el video, la sexta usando "Engranaje, Yugo, Unidad (Módulo 1.1, Dientes 20.stl").
○ Presionado un " Perno, Engranaje, Corona.engranaje stl "en uno", Corona (Módulo 1.5, dientes 12).stl".
○ Deslizó el conjunto de engranaje de tornillo y corona en un " Espaciador, plano.stl", luego asegurado en su lugar con un conjunto de yugo asegurándose de que el conjunto girara libremente.
○ Presionado un " Engranaje, Corona (Módulo 1.5, dientes 12).stl "en un" Eje, Ruedas.stl " alineando cuidadosamente el engranaje con la estría del eje.
○ Posicionado el eje y el conjunto de engranajes de corona en un " Cuerpo, a la derecha.stl", con el engranaje adyacente al cuerpo.
○ Presionó el conjunto de yugo en el cuerpo.
○ Presionado " Cuerpo, Izquierda.stl" en la asamblea.
○ Roscado de dos " Rueda, RHT.stl " en las roscas del conjunto del engranaje del eje y de la corona y alineó las juntas de rótula.
○ Posicionado y asegurado en su lugar cuatro " Espaciador, Redondo.stl "en el conjunto del cuerpo usando ocho" Perno, 6mm, hombre de 3.8 mm. stl".
○ Colocado un "" Pivote, Hombre.stl" en uno " Pivote, Ala.stl "luego asegurado en su lugar con un" Perno Pivote Ala.stl " asegurándose de que el conjunto girara libremente.
○ Asegurado un " Ala, Derecha.stl "en el conjunto del hombre usando un" Perno, 6mm, hombre de 2.8 mm. stl".
○ Se rompió un extremo del " Agujero de conexión de 6,3 mm de varilla.stl " en la bola del conjunto del ala.
○ Posicionado el conjunto de alas en el hombre del lado derecho del cuerpo y luego asegurado en su lugar con un " Perno, 6 mm, 4,4 mm Hombre.stl".
○ Encajó el extremo restante de la biela en la bola de la rueda a la derecha y luego se aseguró de que el conjunto girara libremente.
○ Repitió los pasos de montaje del ala izquierda.
○ Roscado un " Eje, Unidad.stl " en el extremo libre de la junta universal.
○ Roscado un conjunto de unión universal en el extremo libre del eje motriz.
○ Posicionado una " Cola.stl "entre los marcos y asegurado en su lugar con dos" Negrita, 6 mm, 4,4 mm Hombre.stl".
Monté el colibrí izquierdo (amarillo en la imagen de la cubierta) como lo hice con el derecho, con la excepción de invertir la orientación del eje y el conjunto de la corona de modo que el engranaje esté adyacente al cuerpo izquierdo (por ejemplo, una imagen de espejo "pico a pico").
Monta la Base.
Monté la base como sigue:
○ Cableado el motor al conector coaxial (opcional) de tal manera que el eje del motor gira en el sentido de las agujas del reloj cuando se ve desde el extremo del eje del motor del motor.
○ Presionado el motor en " Base.stl".
○ Aseguró el cable coaxial al conjunto de base usando la tuerca incluida.
○ Engranaje presionado, Motor (Módulo 1.1, Dientes 10).stl " en el eje del motor.
○ Posicionado un " Engranaje, Yugo, Unidad (Módulo 1.1, Dientes 20).stl " montaje (montado en el paso anterior) en el conjunto de base y roscado un "Acoplador, 18mm.stl" en las roscas de engranajes.
○ Engranaje roscado, Gusano.stl" en el acoplador.
○ Roscado un "acoplador, 4,4 mm. stl" en el extremo libre del conjunto de yugo engranado.
○ Roscado el acoplador " restante.stl " en el engranaje de gusano.
○ Roscado un conjunto de yugo en el acoplador.
○ Roscado un " acoplador, 4mm. stl en el extremo libre de la asamblea del yugo.
○ Posicionado " Engranaje.stl "en el conjunto de base luego asegurado en su lugar con un "Perno, 6 mm, hombre de 4,4 mm. stl".
○ Asegurado un " Brazo, Engranaje.stl "onto" Brazo.stl "usando un" Perno, 6mm, hombre de 4.4 mm. stl".
○ Aseguró este conjunto de brazo en el extremo izquierdo del conjunto de base con dos "Perno, 6 mm, hombre de 4,4 mm. stl" asegurándose de que el brazo girara libremente.
○ Asegurado el resto " Brazo, Engranaje.stl" onto " Brazo, Offset.stl "(en la cara exterior del brazo desplazado) usando un "Perno, 6 mm, hombre de 4,4 mm. stl".
○ Aseguró este conjunto de brazo en el extremo derecho del conjunto de base usando dos "Perno, 6 mm, hombre de 4,4 mm. stl" asegurándose de que el brazo girara libremente.
○ Aseguró los extremos libres de cada brazo del engranaje al engranaje usando un " Eje, Brazo, Engranaje.stl".
○ Aplicó potencia al motor y permitió que el brazo izquierdo viajara hasta el límite más bajo, luego eliminó la potencia.
○ Cubierta deslizada, Izquierda.stl "sobre el extremo libre del brazo izquierdo, lo deslizó en su posición, luego se aseguró en su lugar con cuatro "Perno, 6 mm, hombre de 3,8 mm. stl".
○ Aplicó potencia al motor y permitió que el brazo derecho viajara hasta el límite más bajo, luego eliminó la potencia.
○ Cubierta deslizada, Derecha.stl "sobre el extremo libre del brazo derecho, lo deslizó en su posición, luego se aseguró en su lugar con cuatro" Perno, 6 mm, hombre de 3,8 mm. stl".
○ Cubierta deslizada, Izquierda.stl "sobre el extremo libre del brazo izquierdo, lo deslizó en su posición, luego se aseguró en su lugar con cuatro "Perno, 6 mm, hombre de 3,8 mm. stl".
Montaje Final.
Para el montaje final, realicé los siguientes pasos.
○ Posicionado el conjunto de pájaro izquierdo (amarillo en la imagen de la cubierta) en el brazo izquierdo y asegurado en su lugar con dos "Perno, 6mm, 4.4 mm Hombre.stl".
○ Enrosque el yugo izquierdo del pájaro en el acoplador izquierdo de la base.
○ Posicionado el conjunto de pájaro derecho (magenta en la imagen de la cubierta) en el brazo derecho y asegurado en su lugar con dos "Perno, 6mm, 4.4 mm Hombre.stl".
○ Enrosque el yugo derecho del pájaro en el acoplador derecho de la base.
○ Presionado la flor de dos".stl" onto " Stems.stl " tal que los pétalos más largos estaban alineados verticalmente.
○ Presionó el conjunto de la flor y el tallo en la base.
Y así es como imprimí y ensamblé "Colibríes".
Espero que te haya gustado!