Tri_max_gripper ( conforme garra robótica ) en 3D para imprimir
















899 Visualizaciones 0 Me gusta 0 Descargas Descarga
Diseñado por Chiprobot (http://www.thingiverse.com/Chiprobot)....
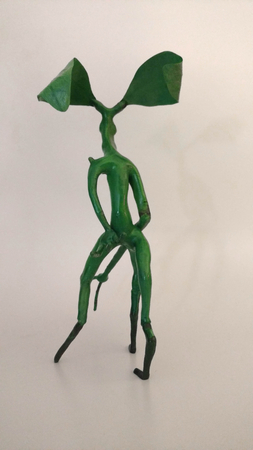
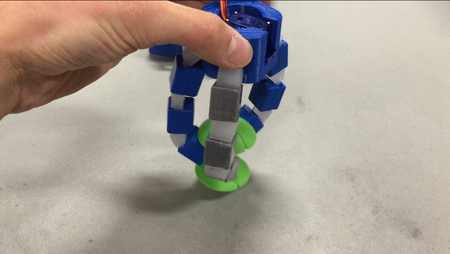
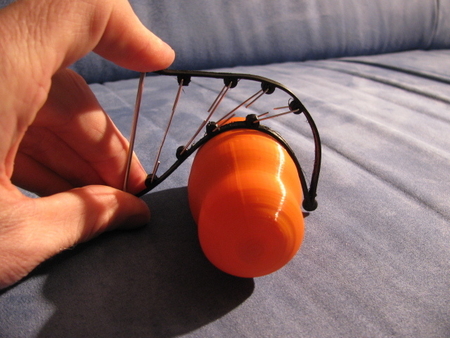
Este es un robot de garra que ajusta su agarre para ajustarse a la forma y la forma de los objetos recogidos.
ACTUALIZACIÓN 2013/12/7 :-
Yo estaba bastante gobsmaked por el interés que este garra ha atraído a
y gracias a todos por los mensajes de tipo.
La Pinza ahora ha sido Presentado en :-
http://hackaday.com/2013/12/03/compliant-robot-gripper-wont-scramble-your-eggs/
de la construcción se puede encontrar en mi robot de la página aquí :-http://letsmakerobots.com/node/39387
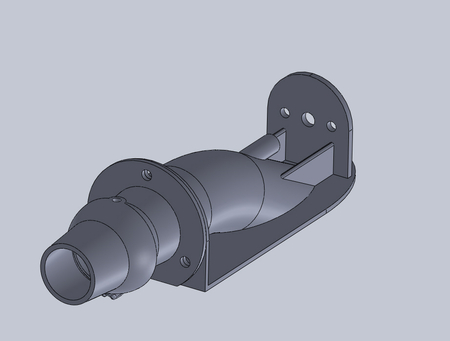
El mecanismo de la unidad es una simple norma de servo modificado con un actuador lineal hecha de un "Pegamento" y lineal potenciómetro de retroalimentación.
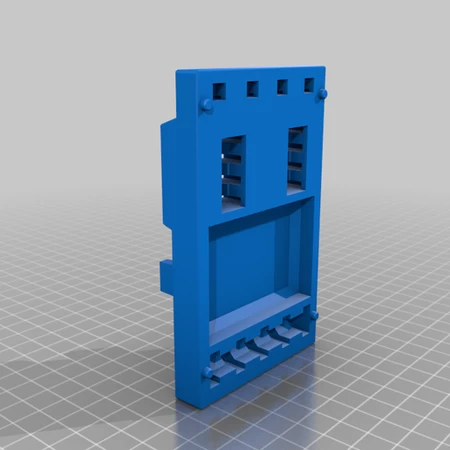
Simple de imprimir piezas con normal PLA , el STL archivos están orientados para la impresión sin necesidad de ayuda, usted puede ne...cesitar para frenar la impresora, mientras que la última parte de las vigas de soporte se imprimen.
Pegamento de los tres (rojo) vigas de apoyo para la frente (azul) del cuerpo.
Agregar alambre (clip de alambre) entre los ojales de los tres brazos.
Recomiendo que ver los anteriores videos para detalles de actuador construir.
Más detalles de la compilación puede ser visto aquí :- http://letsmakerobots.com/node/31838?page=1
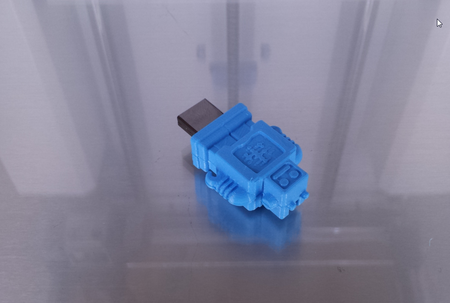
Ajuste en el lineal mecanismo Servo (yo usé una de Pritt stick, como el cuerpo y un brillo de labios en forma de tubo como el émbolo (pegamento el émbolo inserte la llave en el interior del brillo de labios de tubo) y pega el émbolo de la corona (verde) en la parte superior de la lipgloss tubo). Se hace de esta manera para que usted pueda afinar (deslizamiento de la corona arriba/abajo) para llevar la pinza extremos juntos para darle a max. agarre
El Servo es un estándar HS-311 - cuando se convierte en un actuador lineal que puede empujar a los 3 kg de fuerza.
Diseñador
Erik de BruijnDescripción del modelo 3d
Este es un robot de pinza por Chiprobot, originalmente publicado en diciembre 1, 2013.Diseñado por Chiprobot (http://www.thingiverse.com/Chiprobot)....
Este es un robot de garra que ajusta su agarre para ajustarse a la forma y la forma de los objetos recogidos.
ACTUALIZACIÓN 2013/12/7 :-
Yo estaba bastante gobsmaked por el interés que este garra ha atraído a
y gracias a todos por los mensajes de tipo.
La Pinza ahora ha sido Presentado en :-
http://hackaday.com/2013/12/03/compliant-robot-gripper-wont-scramble-your-eggs/
de la construcción se puede encontrar en mi robot de la página aquí :-http://letsmakerobots.com/node/39387
El mecanismo de la unidad es una simple norma de servo modificado con un actuador lineal hecha de un "Pegamento" y lineal potenciómetro de retroalimentación.
Parametros de impresión 3d
InstruccionesSimple de imprimir piezas con normal PLA , el STL archivos están orientados para la impresión sin necesidad de ayuda, usted puede ne...cesitar para frenar la impresora, mientras que la última parte de las vigas de soporte se imprimen.
Pegamento de los tres (rojo) vigas de apoyo para la frente (azul) del cuerpo.
Agregar alambre (clip de alambre) entre los ojales de los tres brazos.
Recomiendo que ver los anteriores videos para detalles de actuador construir.
Más detalles de la compilación puede ser visto aquí :- http://letsmakerobots.com/node/31838?page=1
Ajuste en el lineal mecanismo Servo (yo usé una de Pritt stick, como el cuerpo y un brillo de labios en forma de tubo como el émbolo (pegamento el émbolo inserte la llave en el interior del brillo de labios de tubo) y pega el émbolo de la corona (verde) en la parte superior de la lipgloss tubo). Se hace de esta manera para que usted pueda afinar (deslizamiento de la corona arriba/abajo) para llevar la pinza extremos juntos para darle a max. agarre
El Servo es un estándar HS-311 - cuando se convierte en un actuador lineal que puede empujar a los 3 kg de fuerza.