Scru-fe: simple c++ robot con ultra-sonic sensor para la educación: arduino uno evitación del obstáculo laberinto de programación en 3D para imprimir




4714 Visualizaciones 2 Me gusta 0 Descargas Descarga
Pienso usar este diseño para promover la necesidad de una forma reali...sta para enseñar a los estudiantes de primaria y secundaria de cómo la programación puede ser simple y de la diversión sin la necesidad de costosos equipos. Por favor comparte/imprime/código y mantener los recursos que fluyen por la educación!
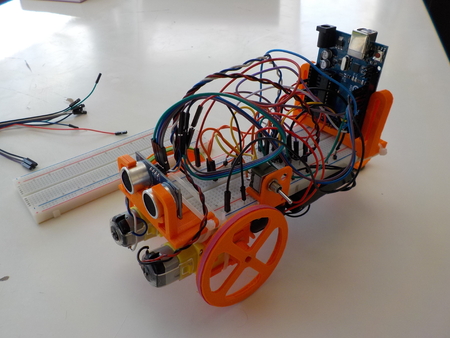
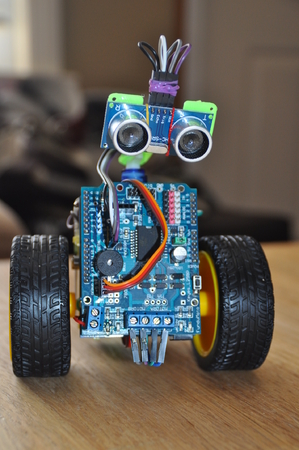
Este Robot construir empezó cuando mi hija de dos años cayó en amor con un viejo ultrasónico robot que he construido en la escuela primaria de veinticinco años. Le faltan partes y ya no funciona, pero ella le ha tratado con amor desde que tenía un año de edad. Para su tercer cumpleaños, me puse a hacer un sub $50 Robot con partes fácilmente reemplazables (ver B. O. M. de instrucciones) que podríamos hacer juntos. El hecho de que ninguna parte de los costos de más de $10 y de que todas las piezas son fáciles de encontrar o de fuente abierta me da la esperanza de que SCRU-FE será transmitida a sus hijos con todos sus grandes recuerdos.
Mi hija adora a este Robot. Ella le puso por nombre Desaliñado, así que he hecho un tonto acrónimo que corresponde a su tonto apariencia.
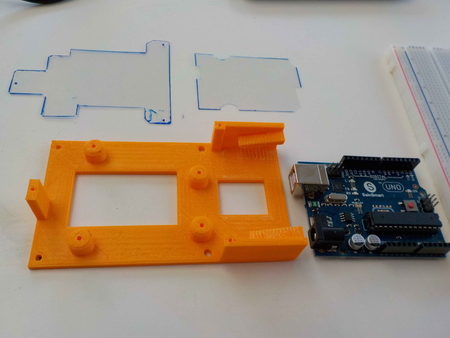
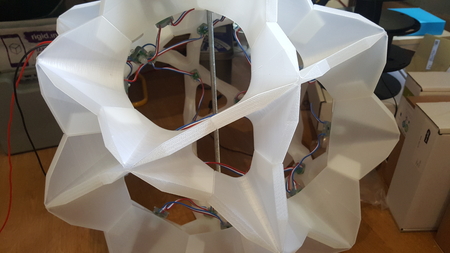
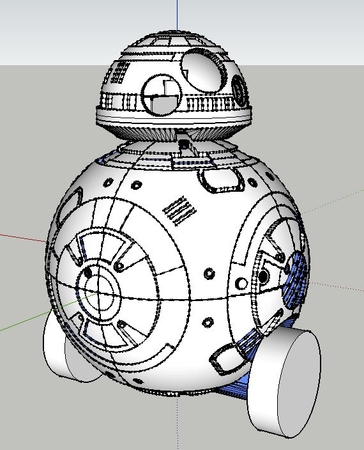
-Impreso Cuerpo
-Impreso Brazo Del Servo
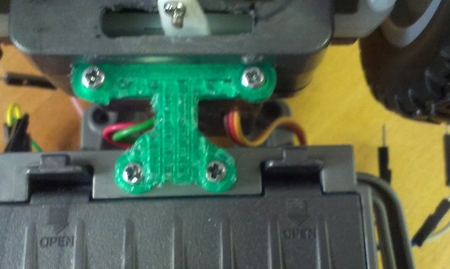
-Impreso Sensor Monte
-(2) Impreso De La Rueda Mitades
-Arduino UNO
-UNO de Motor... shield (yo uso el L298P con zumbador, Ping y servo de entradas)
-Dos "vehículos Inteligentes" Gearmotors y ruedas
-Dos 3AA soportes de las Baterías
-SG-90 9g Micro servo conjunto
-HC-SR04 sensor de Ultrasonidos
-200mm hembra/hembra de 4 pines cable de
-Alto Amperaje interruptor de palanca (15A o mejor aún buscando una buena fuente puede saltar y tomar una batería para desconectar la alimentación quemaba a través de un par de 5A interruptores ya :()
-(4) de 25 mm de secciones de cable para motores
-(2) F623 rodamientos (rueda)
-(4) M3x25mm zócalo de la tapa (motores)
-(1) M3x15mm zócalo de la tapa (en el cuello)
-(1) M3x20mm zócalo de la tapa (rueda)
-(4) M3x8mm plana de cabeza hexagonal tornillo de cabeza --(baterías)
-(4) M3x6mm zócalo de la tapa (ONU)
-(6) arandelas M3 (rueda)
-(10) M3 nylon tuercas de bloqueo
-varias pequeñas bandas de goma
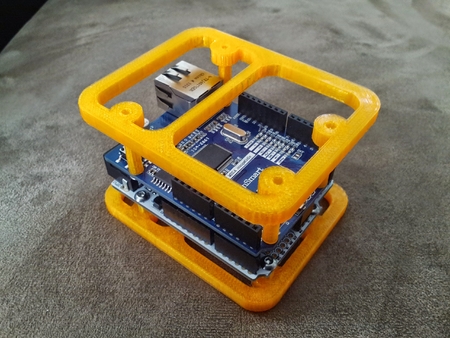
opcional: (3) 12 mm de largo M3 acoplador de nueces a los internos de la asamblea más fácil (sustituye a 6 m3 de tuercas de fijación, (4) 12 mm (6 mm rosca) m3 enfrentamiento tuercas de la placa arduino para darle un aspecto más profesional
Herramientas Necesarias:
-Llave allen de 2 mm
-2.5 mm llave allen
-2-3 mm destornillador phillips
-2-3 mm destornillador
-5.5 mm llave
-aguja pequeña nariz capas
-pinzas (ESD-15 si es posible)
-Soldador con smal de la punta de soldadura y
-pequeño taladro
-1.5 mm o 1/6" de broca
-3 mm o 1/8" broca
-broca para elegido interruptor de palanca
La construcción de consejos:
Después de la impresión en el cuerpo perfore todos los agujeros con una broca de 3mm, excepto por la ONU en los agujeros de montaje. En mi imprime el M3x6mm tornillos auto roscado en el propio plástico. Si esto no funciona, utilice tornillos de 8 mm de nylon y tuercas de bloqueo en su lugar.
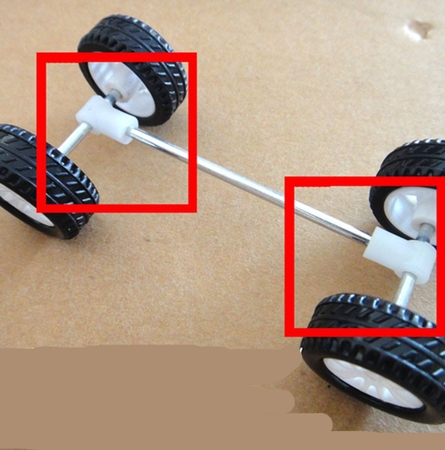
La necesidad de ruedas 3 arandelas o espaciadores de 2 mm a cada lado para permitir la separación de las tuercas que sujetan la caja de la batería en. Si no hay suficiente espacio libre se puede utilizar un regular M3 tuercas de la caja de la batería o agregar más arandelas entre la rueda y el cuerpo.
Código: el código de ejemplo se incluye un rápido código de trabajo, sin embargo, yo no soy maestro en C++ ni Arduino, así que por favor utilice como un ejemplo solamente.
Diseñador
rtheissDescripción del modelo 3d
S. C. R. U.-F. E.: Simple C++ Robot con Ultrasonidos-sensor para la EducaciónPienso usar este diseño para promover la necesidad de una forma reali...sta para enseñar a los estudiantes de primaria y secundaria de cómo la programación puede ser simple y de la diversión sin la necesidad de costosos equipos. Por favor comparte/imprime/código y mantener los recursos que fluyen por la educación!
Este Robot construir empezó cuando mi hija de dos años cayó en amor con un viejo ultrasónico robot que he construido en la escuela primaria de veinticinco años. Le faltan partes y ya no funciona, pero ella le ha tratado con amor desde que tenía un año de edad. Para su tercer cumpleaños, me puse a hacer un sub $50 Robot con partes fácilmente reemplazables (ver B. O. M. de instrucciones) que podríamos hacer juntos. El hecho de que ninguna parte de los costos de más de $10 y de que todas las piezas son fáciles de encontrar o de fuente abierta me da la esperanza de que SCRU-FE será transmitida a sus hijos con todos sus grandes recuerdos.
Mi hija adora a este Robot. Ella le puso por nombre Desaliñado, así que he hecho un tonto acrónimo que corresponde a su tonto apariencia.
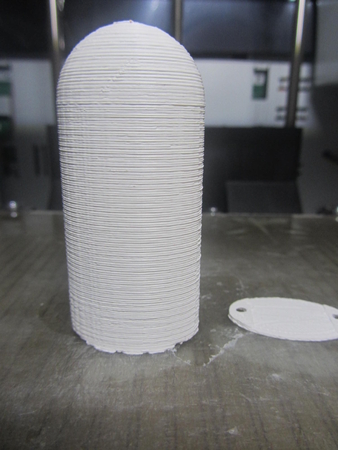
Parametros de impresión 3d
Lista De Materiales-Impreso Cuerpo
-Impreso Brazo Del Servo
-Impreso Sensor Monte
-(2) Impreso De La Rueda Mitades
-Arduino UNO
-UNO de Motor... shield (yo uso el L298P con zumbador, Ping y servo de entradas)
-Dos "vehículos Inteligentes" Gearmotors y ruedas
-Dos 3AA soportes de las Baterías
-SG-90 9g Micro servo conjunto
-HC-SR04 sensor de Ultrasonidos
-200mm hembra/hembra de 4 pines cable de
-Alto Amperaje interruptor de palanca (15A o mejor aún buscando una buena fuente puede saltar y tomar una batería para desconectar la alimentación quemaba a través de un par de 5A interruptores ya :()
-(4) de 25 mm de secciones de cable para motores
-(2) F623 rodamientos (rueda)
-(4) M3x25mm zócalo de la tapa (motores)
-(1) M3x15mm zócalo de la tapa (en el cuello)
-(1) M3x20mm zócalo de la tapa (rueda)
-(4) M3x8mm plana de cabeza hexagonal tornillo de cabeza --(baterías)
-(4) M3x6mm zócalo de la tapa (ONU)
-(6) arandelas M3 (rueda)
-(10) M3 nylon tuercas de bloqueo
-varias pequeñas bandas de goma
opcional: (3) 12 mm de largo M3 acoplador de nueces a los internos de la asamblea más fácil (sustituye a 6 m3 de tuercas de fijación, (4) 12 mm (6 mm rosca) m3 enfrentamiento tuercas de la placa arduino para darle un aspecto más profesional
Herramientas Necesarias:
-Llave allen de 2 mm
-2.5 mm llave allen
-2-3 mm destornillador phillips
-2-3 mm destornillador
-5.5 mm llave
-aguja pequeña nariz capas
-pinzas (ESD-15 si es posible)
-Soldador con smal de la punta de soldadura y
-pequeño taladro
-1.5 mm o 1/6" de broca
-3 mm o 1/8" broca
-broca para elegido interruptor de palanca
La construcción de consejos:
Después de la impresión en el cuerpo perfore todos los agujeros con una broca de 3mm, excepto por la ONU en los agujeros de montaje. En mi imprime el M3x6mm tornillos auto roscado en el propio plástico. Si esto no funciona, utilice tornillos de 8 mm de nylon y tuercas de bloqueo en su lugar.
La necesidad de ruedas 3 arandelas o espaciadores de 2 mm a cada lado para permitir la separación de las tuercas que sujetan la caja de la batería en. Si no hay suficiente espacio libre se puede utilizar un regular M3 tuercas de la caja de la batería o agregar más arandelas entre la rueda y el cuerpo.
Código: el código de ejemplo se incluye un rápido código de trabajo, sin embargo, yo no soy maestro en C++ ni Arduino, así que por favor utilice como un ejemplo solamente.