Caminador de pin de cascanueces en 3D para imprimir





1165 Visualizaciones 0 Me gusta 0 Descargas Descarga
https://youtu.be/j8txVIA9YJA
Una reminiscencia de un modelo de Cascanueces estático que mi padre y yo creamos ...en madera de balsa usando uno de mis regalos de Navidad favoritos de la infancia, el "Mattel Power Shop" (hace más de cincuenta años), "Robotic Nutcracker Pin Walker" es una recreación impresa en 3D en forma de pin walker del bigote laminado y brazos, manos, cuerpo, pies y cabeza torneados. No pude localizar nuestros planos originales, por lo que esta versión fue recreada a partir de fragmentos de recuerdos, fotografías familiares y búsquedas en Internet.
Esta recreación impresa en 3D está diseñada para impresoras 3D de extrusión única, por lo que algunas piezas de detalles de color se roscan o pegan (usé pegamento de cianoacrilato grueso) en su lugar. También diseñé este modelo para imprimir sin necesidad de material de soporte, sin embargo, si tiene acceso a una impresora de doble extrusión con PVA utilizada para soporte, "Base.stl " requerirá mucho menos limpieza después de la impresión. El mecanismo que impulsa este modelo es muy similar a mis diseños anteriores de pasadores tanto en piezas impresas en 3D como compradas.
Para la estabilidad longitudinal y lateral de un modelo de pasador de este tamaño, es importante que el centro de masa esté ubicado sobre el centro de la trayectoria elíptica de los pasadores (de adelante hacia atrás), y centrado entre los pasadores (de izquierda a derecha). Como se puede ver en las imágenes del centro de masa calculadas por Autodesk Fusion 360, el centro de masa de este modelo, tanto de adelante hacia atrás como de lado a lado, satisface estas condiciones, pero es ligeramente pesado, por lo que utilicé un motor de engranajes de menor RPM en el diseño para una mayor estabilidad. Con la batería y el motorreductor que seleccioné para este modelo, el consumo de energía promedio es de alrededor de 16MA, por lo que debería funcionar unas horas antes de necesitar una recarga.
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Una nota final, no recibo ninguna compensación de ninguna forma por el diseño, el equipo, las piezas y / o los materiales utilizados en este modelo.
Y una última, última nota, de Lora y yo y toda nuestra familia, para ti y los tuyos, ¡Feliz Navidad!
Diseñado con Autodesk Fusion 360, cortado con Cura 4.4.0 e impreso en PLA en un Ultimaker 2 + Extended, un Ultimaker 3 Extended y un Ultimaker S5.
Comprar las siguientes piezas para este modelo:
* Una batería de litio de 3.7 vdc 100ma (https://www.adafruit.com/product/1570).
* Un c...able de 2 pines JST PH (https://www.adafruit.com/product/3814).
* Un motor de engranaje N20 6VDC 74RPM.
* Un interruptor micro (Uxcell a12013100ux0116 Alto Botón 3P 2 Posición 1P2T SPDT Vertical * Interruptor deslizante * 0.5 Amperios, 50V DC, 50 Piezas, 3 mm).
También necesitará un cargador de batería adecuado.
Imprimí en 3D las siguientes partes en PLA at.altura de la capa de 15m m con el relleno del 20% (a menos que se indique lo contrario) y ningunos soportes:
* Dos " Eje, Cuerpo.stl", white.
* Dos " Eje, Pin.stl", white.
* One " Axle, Seesaw.stl".
* Four " Band.stl", amarillo.
* Una " Base.stl "usando la opción Cura 4.4.0 "Relleno gradual", negro con soporte PVA opcional.
* One " Belt.stl", negro.
* Two " Bolt, Shoulder.stl", amarillo.
* Una " Hebilla.stl", amarillo.
* Botón de Seis".stl", amarillo.
* Una " Leva Y Eje.stl", white.
* One " Cam.stl", white.
* Dos " Cuff.stl", green.
* One " Eye, Left.stl", negro.
* One " Eye, Right.stl", negro.
* One " Eyebrow, Left.stl", amarillo.
* One " Eyebrow, Right.stl", amarillo.
* Un " Engranaje, Corona, Eje.stl", white.
* Un " Engranaje, Corona, Motor.stl", white.
* Two " Hand.stl", white.
* Un " Sombrero, Botón Medallón.stl", amarillo.
* One " Hat, Medallion.stl", amarillo.
* One " Hat, Pin.stl", negro.
* One " Hat.stl "usando la opción Cura 4.4.0 "Relleno gradual", negro.
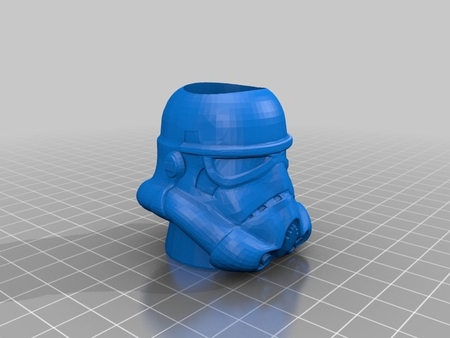
* One " Head.stl", white.
* One " Leg Band, Left.stl", amarillo.•
* One " Leg Band, Right.stl", amarillo.
* One " Mustache.stl", amarillo.
* Two "Pin", white.
* One " Seesaw.stl", white.
* One " Shoulders.stl", amarillo.
* One " Torso, Lower.stl", red.
* One " Torso, Upper.stl", red.
Este modelo es una impresión y montaje de alta precisión que utiliza a veces piezas impresas en 3D de precisión muy pequeñas en espacios reducidos. Antes del montaje, pruebe el ajuste y el ajuste, lime, perfore, lije, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
Este modelo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1) para la limpieza de roscas.
Monta el Sombrero.
Para montar el Sombrero, realicé los siguientes pasos:
* Pulsado " Sombrero, Botón Medallón.stl " en " Sombrero.stl".
* Glued "Hat, Medallion.stl " a la asamblea del sombrero.
* Pegado " Sombrero, Pin.stl " a la asamblea del sombrero.
Monta la Cabeza.
Para montar la cabeza, realicé los siguientes pasos:
* Presionado y pegado " Ojo, Derecha.stl", " Ojo, Izquierda.stl", " Ceja, Correcto.stl " y " Ceja izquierda.stl " en "la Cabeza".stl".
* Glued " Bigote.stl " en el conjunto debajo de la nariz.
Conecta el Conjunto del Sombrero al Conjunto de la cabeza.
Para unir el conjunto del sombrero al conjunto de la cabeza, usando el pasador del sombrero como guía de centrado, pegué los dos conjuntos juntos.
Reúne el Cuerpo.
Para montar el cuerpo, realicé los siguientes pasos:
* Pulsado el botón de cuatro".stl " en " Torso, Arriba.stl".
* Hebilla pulsada.stl "onto" Cinturón.stl".
* Deslizar el conjunto de la correa sobre el conjunto del torso alineando las ranuras del conjunto de la correa con las patas del conjunto del torso.
* Pressed " Shoulders.stl " en el conjunto del torso.
* Colocado una " Banda.stl " en una de las patas del conjunto del torso.
* Slid one " Bolt, Shoulder.stl " a través del hombro, el torso y la banda.
* Colocado una " Banda.stl " en la pierna restante del conjunto del torso.
* Deslizó el " Perno restante, Debe.stl " a través del hombro, el torso y la banda.
* Coloquo una " manguito.stl " en cada uno de los pernos del hombre.
Conecta el motor, el interruptor y el conector JST.
Para conectar el motor, el interruptor y el conector JST, realicé los siguientes pasos:
* Corte el cable negro en el conector JST a 20 mm de longitud, pelado y estañado el extremo y soldado al terminal central del interruptor.
* Disparó y estañó los extremos de la sección restante de 80 mm de cable negro, y lo soldó desde un terminal exterior del interruptor al terminal del motor" -".
* Soldó el cable rojo del conector JST al terminal " + " del motor.
Después del cableado, conecté la batería al conector JST, encendí el interruptor y verificé que el eje del motor giraba en el sentido de las agujas del reloj como se ve desde el extremo del eje del motor (si no, invertí el cableado del motor). Luego apagué el interruptor y desconecté la batería.
Monta la Base.
Para montar la base, realicé los siguientes pasos:
* Presiona el botón de dos " restante.stl " en " Torso, Más Abajo.stl".
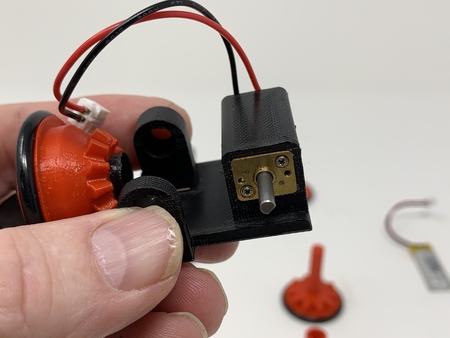
* Presionó el motor en su posición hacia arriba desde el lado de los pies de la "Base".stl " tal que el eje del motor estaba a 3 mm por encima de la superficie de la placa del engranaje de la corona del motor.
* Posicionado el conjunto del torso sobre el conjunto base (centrado sobre los orificios inferiores de la base del conjunto bajo, botones hacia adelante), luego asegurado en su lugar utilizando ambos "Eje, Cuerpo.stl", asegurándose de que la parte inferior del torso se balanceara libremente sobre los ejes.
* Pasó el interruptor, el conector JST y los cables a través del conjunto inferior del torso y luego presionó el interruptor en el torso inferior.
* Prensado " Engranaje, Corona, Motor.stl " en el eje del motor expuesto al ras con el extremo y asegurado en su lugar con un pequeño punto de pegado de cianoacrilato.
* Posicionado " Engranaje, Corona, Eje.stl " dentro del conjunto de base sobre el orificio del eje más pequeño.
* Deslizó el eje hexagonal de " Leva y Eje.stl " en el montaje de la base agujero del eje más grande.
* Presione el eje hexagonal a través del engranaje del eje y salga del orificio del eje más pequeño en el conjunto de la base (esto debe ser un ajuste apretado, si no, agregué un pequeño punto de pegado de cianoacrilato).
* Presionado " Cam.stl " en el extremo del eje hexagonal del conjunto del eje de tal manera que la leva estaba a 180 grados de la "Leva y el eje.stl " componente (esto debe ser un ajuste apretado, si no, he añadido un pequeño punto de pegado de cianoacrilato).
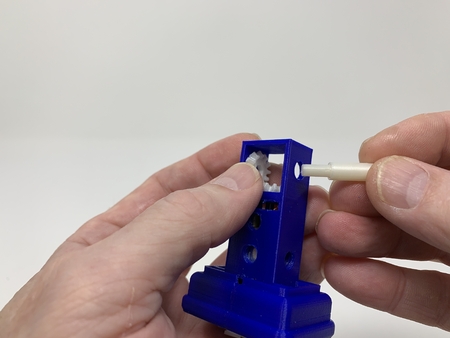
* Deslizó un " pasador "en el conjunto de base y colocó el anillo de leva sobre la leva y luego se aseguró en su lugar con un"Eje, Pasador".stl".
* Deslizó el " Pin " restante.stl " en el conjunto de base y colocó el anillo de leva sobre la leva y luego se aseguró en su lugar con el eje restante, Pasador.stl".
* Giró el engranaje del motor a mano hasta que los pasadores de la pierna estuvieran nivelados (una leva hacia adelante, permaneciendo recta hacia atrás).
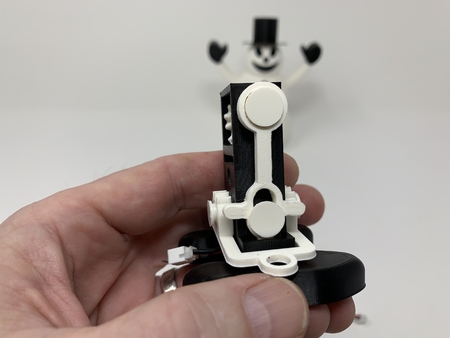
* Positioned " Seesaw.stl "sobre el orificio roscado superior en el conjunto de base y asegurado en su lugar con" Eje, balancín.stl", asegurándose de que los dos dientes centrales del balancín rodeen el diente central en el engranaje inferior del torso.
Montaje Final.
Para el montaje final, realicé los siguientes pasos:
* Aseguró la batería en su lugar usando cinta de doble cara, luego conectó la batería en el conector JST.
* Mientras sostiene el conjunto del cuerpo boca abajo, deslice el conjunto de la base en el conjunto del cuerpo.
* Posicionado una " Banda.stl " sobre el perno de hombre en el conjunto del cuerpo, alineando la banda con el contorno de la base del torso.
* Posicionado una " Mano.stl " sobre las roscas del perno de hombre en el conjunto del cuerpo con el agarre sobre el torso y asegurado en su lugar girando el perno de hombre en el sentido de las agujas del reloj (el perno, el torso superior, la banda, el manguito, la banda y la mano forman un mecanismo de "tornillo" que asegura el conjunto de base al conjunto del cuerpo).
* Repita el paso anterior para la mano restante.
* Fijar la cabeza al conjunto con pequeños puntos de pegado de cianoacrilato.
* Aseguró la banda de dos Piernas, Izquierda.stl " y " Banda de la pierna, Derecha.stl " a la base usando pequeños puntos de pegado de cianoacrilato.
* Se encendió la energía, y fuera de este cascanueces fue pin walking!
Y así es como imprimí y ensamblé en 3D Nutcracker Pin Walker.
Espero que te haya gustado!
Diseñador
Greg ZumwaltDescripción del modelo 3d
Un pasador con traje de Cascanueces.https://youtu.be/j8txVIA9YJA
Una reminiscencia de un modelo de Cascanueces estático que mi padre y yo creamos ...en madera de balsa usando uno de mis regalos de Navidad favoritos de la infancia, el "Mattel Power Shop" (hace más de cincuenta años), "Robotic Nutcracker Pin Walker" es una recreación impresa en 3D en forma de pin walker del bigote laminado y brazos, manos, cuerpo, pies y cabeza torneados. No pude localizar nuestros planos originales, por lo que esta versión fue recreada a partir de fragmentos de recuerdos, fotografías familiares y búsquedas en Internet.
Esta recreación impresa en 3D está diseñada para impresoras 3D de extrusión única, por lo que algunas piezas de detalles de color se roscan o pegan (usé pegamento de cianoacrilato grueso) en su lugar. También diseñé este modelo para imprimir sin necesidad de material de soporte, sin embargo, si tiene acceso a una impresora de doble extrusión con PVA utilizada para soporte, "Base.stl " requerirá mucho menos limpieza después de la impresión. El mecanismo que impulsa este modelo es muy similar a mis diseños anteriores de pasadores tanto en piezas impresas en 3D como compradas.
Para la estabilidad longitudinal y lateral de un modelo de pasador de este tamaño, es importante que el centro de masa esté ubicado sobre el centro de la trayectoria elíptica de los pasadores (de adelante hacia atrás), y centrado entre los pasadores (de izquierda a derecha). Como se puede ver en las imágenes del centro de masa calculadas por Autodesk Fusion 360, el centro de masa de este modelo, tanto de adelante hacia atrás como de lado a lado, satisface estas condiciones, pero es ligeramente pesado, por lo que utilicé un motor de engranajes de menor RPM en el diseño para una mayor estabilidad. Con la batería y el motorreductor que seleccioné para este modelo, el consumo de energía promedio es de alrededor de 16MA, por lo que debería funcionar unas horas antes de necesitar una recarga.
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Una nota final, no recibo ninguna compensación de ninguna forma por el diseño, el equipo, las piezas y / o los materiales utilizados en este modelo.
Y una última, última nota, de Lora y yo y toda nuestra familia, para ti y los tuyos, ¡Feliz Navidad!
Diseñado con Autodesk Fusion 360, cortado con Cura 4.4.0 e impreso en PLA en un Ultimaker 2 + Extended, un Ultimaker 3 Extended y un Ultimaker S5.
Parametros de impresión 3d
Parte.Comprar las siguientes piezas para este modelo:
* Una batería de litio de 3.7 vdc 100ma (https://www.adafruit.com/product/1570).
* Un c...able de 2 pines JST PH (https://www.adafruit.com/product/3814).
* Un motor de engranaje N20 6VDC 74RPM.
* Un interruptor micro (Uxcell a12013100ux0116 Alto Botón 3P 2 Posición 1P2T SPDT Vertical * Interruptor deslizante * 0.5 Amperios, 50V DC, 50 Piezas, 3 mm).
También necesitará un cargador de batería adecuado.
Imprimí en 3D las siguientes partes en PLA at.altura de la capa de 15m m con el relleno del 20% (a menos que se indique lo contrario) y ningunos soportes:
* Dos " Eje, Cuerpo.stl", white.
* Dos " Eje, Pin.stl", white.
* One " Axle, Seesaw.stl".
* Four " Band.stl", amarillo.
* Una " Base.stl "usando la opción Cura 4.4.0 "Relleno gradual", negro con soporte PVA opcional.
* One " Belt.stl", negro.
* Two " Bolt, Shoulder.stl", amarillo.
* Una " Hebilla.stl", amarillo.
* Botón de Seis".stl", amarillo.
* Una " Leva Y Eje.stl", white.
* One " Cam.stl", white.
* Dos " Cuff.stl", green.
* One " Eye, Left.stl", negro.
* One " Eye, Right.stl", negro.
* One " Eyebrow, Left.stl", amarillo.
* One " Eyebrow, Right.stl", amarillo.
* Un " Engranaje, Corona, Eje.stl", white.
* Un " Engranaje, Corona, Motor.stl", white.
* Two " Hand.stl", white.
* Un " Sombrero, Botón Medallón.stl", amarillo.
* One " Hat, Medallion.stl", amarillo.
* One " Hat, Pin.stl", negro.
* One " Hat.stl "usando la opción Cura 4.4.0 "Relleno gradual", negro.
* One " Head.stl", white.
* One " Leg Band, Left.stl", amarillo.•
* One " Leg Band, Right.stl", amarillo.
* One " Mustache.stl", amarillo.
* Two "Pin", white.
* One " Seesaw.stl", white.
* One " Shoulders.stl", amarillo.
* One " Torso, Lower.stl", red.
* One " Torso, Upper.stl", red.
Este modelo es una impresión y montaje de alta precisión que utiliza a veces piezas impresas en 3D de precisión muy pequeñas en espacios reducidos. Antes del montaje, pruebe el ajuste y el ajuste, lime, perfore, lije, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
Este modelo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1) para la limpieza de roscas.
Monta el Sombrero.
Para montar el Sombrero, realicé los siguientes pasos:
* Pulsado " Sombrero, Botón Medallón.stl " en " Sombrero.stl".
* Glued "Hat, Medallion.stl " a la asamblea del sombrero.
* Pegado " Sombrero, Pin.stl " a la asamblea del sombrero.
Monta la Cabeza.
Para montar la cabeza, realicé los siguientes pasos:
* Presionado y pegado " Ojo, Derecha.stl", " Ojo, Izquierda.stl", " Ceja, Correcto.stl " y " Ceja izquierda.stl " en "la Cabeza".stl".
* Glued " Bigote.stl " en el conjunto debajo de la nariz.
Conecta el Conjunto del Sombrero al Conjunto de la cabeza.
Para unir el conjunto del sombrero al conjunto de la cabeza, usando el pasador del sombrero como guía de centrado, pegué los dos conjuntos juntos.
Reúne el Cuerpo.
Para montar el cuerpo, realicé los siguientes pasos:
* Pulsado el botón de cuatro".stl " en " Torso, Arriba.stl".
* Hebilla pulsada.stl "onto" Cinturón.stl".
* Deslizar el conjunto de la correa sobre el conjunto del torso alineando las ranuras del conjunto de la correa con las patas del conjunto del torso.
* Pressed " Shoulders.stl " en el conjunto del torso.
* Colocado una " Banda.stl " en una de las patas del conjunto del torso.
* Slid one " Bolt, Shoulder.stl " a través del hombro, el torso y la banda.
* Colocado una " Banda.stl " en la pierna restante del conjunto del torso.
* Deslizó el " Perno restante, Debe.stl " a través del hombro, el torso y la banda.
* Coloquo una " manguito.stl " en cada uno de los pernos del hombre.
Conecta el motor, el interruptor y el conector JST.
Para conectar el motor, el interruptor y el conector JST, realicé los siguientes pasos:
* Corte el cable negro en el conector JST a 20 mm de longitud, pelado y estañado el extremo y soldado al terminal central del interruptor.
* Disparó y estañó los extremos de la sección restante de 80 mm de cable negro, y lo soldó desde un terminal exterior del interruptor al terminal del motor" -".
* Soldó el cable rojo del conector JST al terminal " + " del motor.
Después del cableado, conecté la batería al conector JST, encendí el interruptor y verificé que el eje del motor giraba en el sentido de las agujas del reloj como se ve desde el extremo del eje del motor (si no, invertí el cableado del motor). Luego apagué el interruptor y desconecté la batería.
Monta la Base.
Para montar la base, realicé los siguientes pasos:
* Presiona el botón de dos " restante.stl " en " Torso, Más Abajo.stl".
* Presionó el motor en su posición hacia arriba desde el lado de los pies de la "Base".stl " tal que el eje del motor estaba a 3 mm por encima de la superficie de la placa del engranaje de la corona del motor.
* Posicionado el conjunto del torso sobre el conjunto base (centrado sobre los orificios inferiores de la base del conjunto bajo, botones hacia adelante), luego asegurado en su lugar utilizando ambos "Eje, Cuerpo.stl", asegurándose de que la parte inferior del torso se balanceara libremente sobre los ejes.
* Pasó el interruptor, el conector JST y los cables a través del conjunto inferior del torso y luego presionó el interruptor en el torso inferior.
* Prensado " Engranaje, Corona, Motor.stl " en el eje del motor expuesto al ras con el extremo y asegurado en su lugar con un pequeño punto de pegado de cianoacrilato.
* Posicionado " Engranaje, Corona, Eje.stl " dentro del conjunto de base sobre el orificio del eje más pequeño.
* Deslizó el eje hexagonal de " Leva y Eje.stl " en el montaje de la base agujero del eje más grande.
* Presione el eje hexagonal a través del engranaje del eje y salga del orificio del eje más pequeño en el conjunto de la base (esto debe ser un ajuste apretado, si no, agregué un pequeño punto de pegado de cianoacrilato).
* Presionado " Cam.stl " en el extremo del eje hexagonal del conjunto del eje de tal manera que la leva estaba a 180 grados de la "Leva y el eje.stl " componente (esto debe ser un ajuste apretado, si no, he añadido un pequeño punto de pegado de cianoacrilato).
* Deslizó un " pasador "en el conjunto de base y colocó el anillo de leva sobre la leva y luego se aseguró en su lugar con un"Eje, Pasador".stl".
* Deslizó el " Pin " restante.stl " en el conjunto de base y colocó el anillo de leva sobre la leva y luego se aseguró en su lugar con el eje restante, Pasador.stl".
* Giró el engranaje del motor a mano hasta que los pasadores de la pierna estuvieran nivelados (una leva hacia adelante, permaneciendo recta hacia atrás).
* Positioned " Seesaw.stl "sobre el orificio roscado superior en el conjunto de base y asegurado en su lugar con" Eje, balancín.stl", asegurándose de que los dos dientes centrales del balancín rodeen el diente central en el engranaje inferior del torso.
Montaje Final.
Para el montaje final, realicé los siguientes pasos:
* Aseguró la batería en su lugar usando cinta de doble cara, luego conectó la batería en el conector JST.
* Mientras sostiene el conjunto del cuerpo boca abajo, deslice el conjunto de la base en el conjunto del cuerpo.
* Posicionado una " Banda.stl " sobre el perno de hombre en el conjunto del cuerpo, alineando la banda con el contorno de la base del torso.
* Posicionado una " Mano.stl " sobre las roscas del perno de hombre en el conjunto del cuerpo con el agarre sobre el torso y asegurado en su lugar girando el perno de hombre en el sentido de las agujas del reloj (el perno, el torso superior, la banda, el manguito, la banda y la mano forman un mecanismo de "tornillo" que asegura el conjunto de base al conjunto del cuerpo).
* Repita el paso anterior para la mano restante.
* Fijar la cabeza al conjunto con pequeños puntos de pegado de cianoacrilato.
* Aseguró la banda de dos Piernas, Izquierda.stl " y " Banda de la pierna, Derecha.stl " a la base usando pequeños puntos de pegado de cianoacrilato.
* Se encendió la energía, y fuera de este cascanueces fue pin walking!
Y así es como imprimí y ensamblé en 3D Nutcracker Pin Walker.
Espero que te haya gustado!