Pequeño robot de brazo en 3D para imprimir



2374 Visualizaciones 0 Me gusta 0 Descargas Descarga
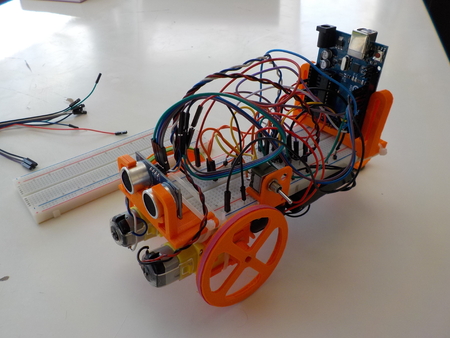
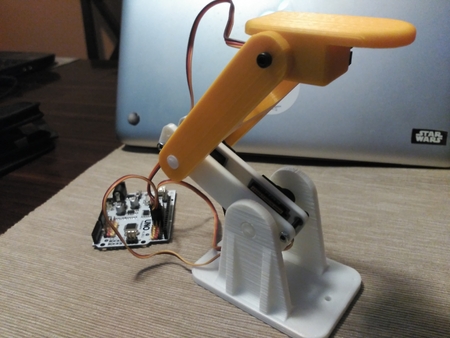
Este brazo robótico ...ha sido creado para poner a prueba el desarrollo de algunas clases en Python para el estudio y control de la Directa y Cinemática Inversa.
Debido a su simplicidad y tamaño, es perfecta para realizar este tipo de software.
Puede ser fácilmente adaptado para convertirse en un 4 Grados de Libertad del brazo.
http://robotstyles.blogspot.com.es/2017/01/una-clase-para-controlarlos.html
https://github.com/movilujo/UtilPython/tree/master/RobotArm3GL%20Class
Diseñador
MovilujoDescripción del modelo 3d
Pequeño, simple y básica brazo robótico creado con fines educativos para el estudio y las pruebas de desarrollo de software.Este brazo robótico ...ha sido creado para poner a prueba el desarrollo de algunas clases en Python para el estudio y control de la Directa y Cinemática Inversa.
Debido a su simplicidad y tamaño, es perfecta para realizar este tipo de software.
Puede ser fácilmente adaptado para convertirse en un 4 Grados de Libertad del brazo.
http://robotstyles.blogspot.com.es/2017/01/una-clase-para-controlarlos.html
https://github.com/movilujo/UtilPython/tree/master/RobotArm3GL%20Class