Enable- yulia personalizado de la mano en 3D para imprimir










1531 Visualizaciones 0 Me gusta 0 Descargas Descarga
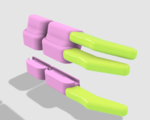
Como parte de las habilitar proyecto en el que estaba asignado para el diseño personalizado de la mano de una chica en la necesidad de que no se beneficiarían de la norma habilita los dispositivos.
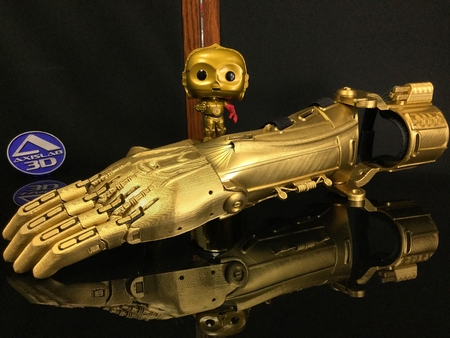
He diseñado el modelo desde Cero en Fusion360. Este es el 4º y último prototipo que está siendo examinada actualmente por las manos de nombre dador de Yulia
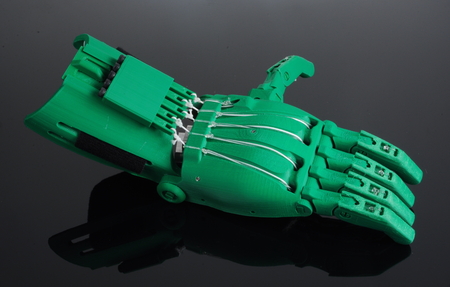
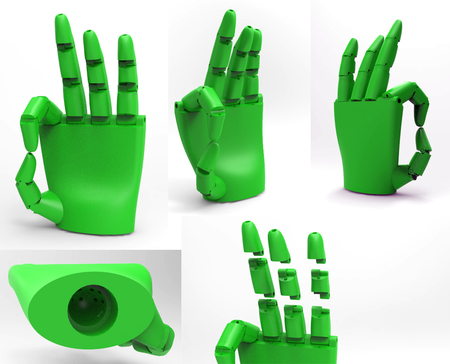
El diseño se basa en la "pizca" de movimiento que es crucial para una buena función de la mano. Yulia todavía tenía un funcionamiento (aunque deformada) dedo que me integrados en el diseño de la función de actuar como el dedo Índice.
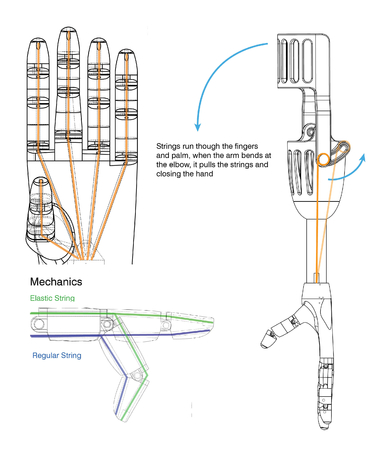
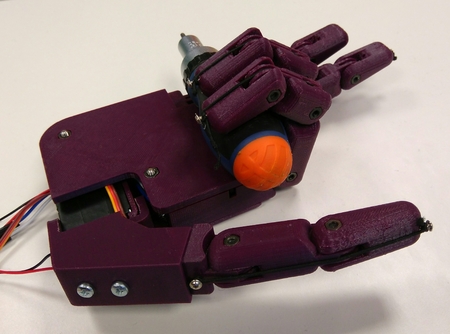
En el diseño he utilizado un escáner 3D de su mano y el modelado de la mano a su alrededor. La mecánica es similar a la del raptor, pero no se basan en gran medida en el movimiento de Yulia restantes del dedo, que esencialmente saca el impreso en 3D pulgar.
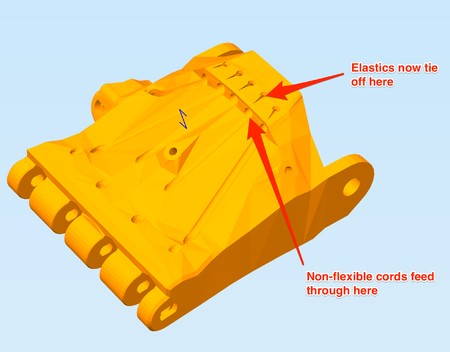
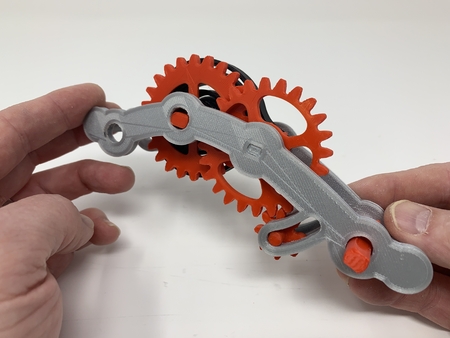
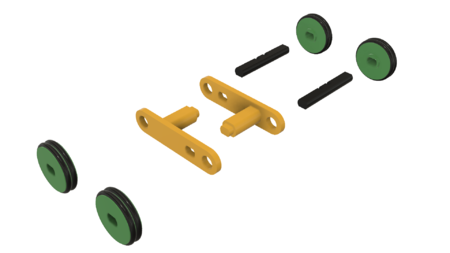
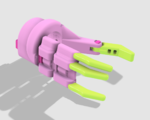
El diseño viene con 3 alternativas de tensor de enlaces para proporcionar diferentes niveles de apalancamiento en el tensor de alambre.
El tensor de enlaces y las puntas de los dedos están conectados por medio de piezas cortas de filamento de 3 mm (por qué el diseño de una 3mm pin cuando usted tiene toneladas en stock :D )
Usted notará que los dedos son puramente estética de la mano es totalmente funcional sin ellos.
- 50cm Dynema (cometa de alambre)
- 50cm Ronda cordón Elástico de 1,5 a 2 mm
- 50cm de Doble cara de 25mm de velcro
- 20cm de Filamento... de 3mm (este se utiliza para conectar los dedos de las manos y el tensor de enlaces)
Impresión:
- 1x Yulia proto04_finger1and2.stl
- 1x Yulia proto04_finger3.stl
- 3x Yulia proto04_fingertip.stl
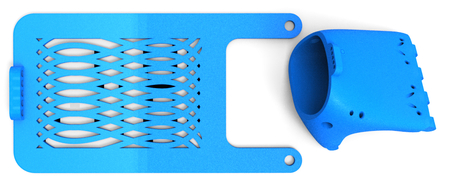
- 1x Yulia proto04_gauntlet.stl
- 1x Yulia proto04_link top 1.stl
- 1x* Yulia proto04_link top 2.stl
- 1x* Yulia proto04_link top 3.stl
- 1x* Yulia proto04_tensioner.stl
- 1x Yulia proto04_thumb pin.stl
- 1x Yulia proto04_thumb.stl
* He diseñado 3 versiones de la 1 de vínculo externo en el tensor para permitir un mayor apalancamiento de la tensión del cable si es necesario
Diseñador
martinvanwezel@mac.comDescripción del modelo 3d
Como parte de las habilitar proyecto en el que estaba asignado para el diseño personalizado de la mano de una chica en la necesidad de que no se bene...ficiarían de la norma habilita los dispositivos. He diseñado el modelo desde Cero en Fusion360. Este es el 4º y último prototipo que está siendo examinada actualmente por las manos de nombre dador de YuliaComo parte de las habilitar proyecto en el que estaba asignado para el diseño personalizado de la mano de una chica en la necesidad de que no se beneficiarían de la norma habilita los dispositivos.
He diseñado el modelo desde Cero en Fusion360. Este es el 4º y último prototipo que está siendo examinada actualmente por las manos de nombre dador de Yulia
El diseño se basa en la "pizca" de movimiento que es crucial para una buena función de la mano. Yulia todavía tenía un funcionamiento (aunque deformada) dedo que me integrados en el diseño de la función de actuar como el dedo Índice.
En el diseño he utilizado un escáner 3D de su mano y el modelado de la mano a su alrededor. La mecánica es similar a la del raptor, pero no se basan en gran medida en el movimiento de Yulia restantes del dedo, que esencialmente saca el impreso en 3D pulgar.
El diseño viene con 3 alternativas de tensor de enlaces para proporcionar diferentes niveles de apalancamiento en el tensor de alambre.
El tensor de enlaces y las puntas de los dedos están conectados por medio de piezas cortas de filamento de 3 mm (por qué el diseño de una 3mm pin cuando usted tiene toneladas en stock :D )
Usted notará que los dedos son puramente estética de la mano es totalmente funcional sin ellos.
Parametros de impresión 3d
Comprar:- 50cm Dynema (cometa de alambre)
- 50cm Ronda cordón Elástico de 1,5 a 2 mm
- 50cm de Doble cara de 25mm de velcro
- 20cm de Filamento... de 3mm (este se utiliza para conectar los dedos de las manos y el tensor de enlaces)
Impresión:
- 1x Yulia proto04_finger1and2.stl
- 1x Yulia proto04_finger3.stl
- 3x Yulia proto04_fingertip.stl
- 1x Yulia proto04_gauntlet.stl
- 1x Yulia proto04_link top 1.stl
- 1x* Yulia proto04_link top 2.stl
- 1x* Yulia proto04_link top 3.stl
- 1x* Yulia proto04_tensioner.stl
- 1x Yulia proto04_thumb pin.stl
- 1x Yulia proto04_thumb.stl
* He diseñado 3 versiones de la 1 de vínculo externo en el tensor para permitir un mayor apalancamiento de la tensión del cable si es necesario