Bateau d'hélice wifi 3d pour imprimer






















22537 Vues 1 Goûts 1 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
L'été se termine dans l'Oklahoma, mais les enfants, les petits-enfants, le...s nièces, les neveux et, bien, à peu près tout le monde que nous connaissons sont toujours dans le lac Zumwalt pour se rafraîchir. Donc, pour encore plus de divertissements de jouets en piscine, j'ai décidé de concevoir un dernier bateau pour la saison estivale, WiFi Propeller Boat.
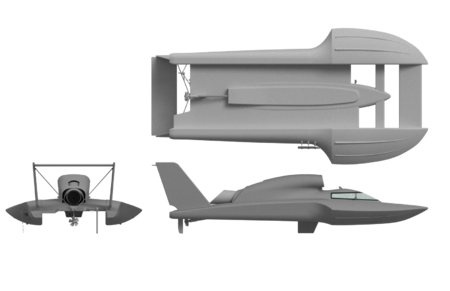
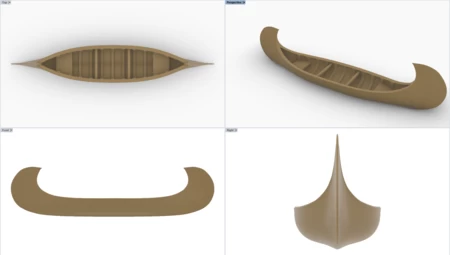
Paddle Boat est une coque jumelle, un bateau à l'hélice à compteur twin contrôlé via le WiFi à l'aide d'un téléphone intelligent, d'une tablette ou d'un autre appareil compatible tactile. Le bateau à l'hélice WiFi crée un point d'accès WiFi (un peu comme les petites caméras de sport) auxquelles vous vous connectez via les paramètres WiFi de l'appareil compatible WiFi. Ensuite, en utilisant votre navigateur Web WiFi Touch Active Device, vous accédez simplement à la page Web du bateau de l'hélice WiFi et vous allez! Les commandes du bateau à l'hélice WiFi sont identiques à celles de ma conception de paddle wifi, il est donc familier pour les petits-enfants. Et dans cette version, j'ai ajouté une surveillance de la tension de la batterie à l'affichage, donc, espérons-le, une baignade n'est pas nécessaire pour récupérer le bateau d'hélice wifi lorsque la batterie s'épuise.
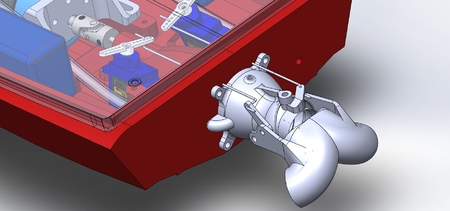
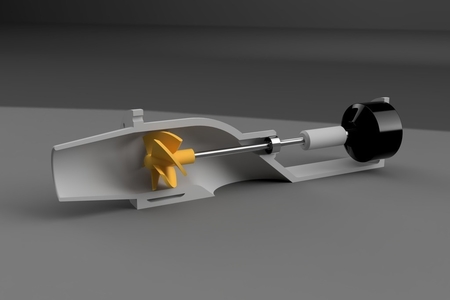
Pour garder l'électronique à sec, le bateau à l'hélice WiFi utilise des "joints universels" imprimés en 3D pour permettre le positionnement de l'électronique au-dessus de la ligne d'eau. J'ai inclus une vidéo des joints universels dans un luminaire de test pour illustrer comment ils fonctionnent.
Un mot de prudence; J'ai conçu le bateau d'hélice wifi pour être "résistant" et non "pas" à l'épreuve de l'eau ", donc si une vague voyou, un petit-enfant, une nièce, un neveu, etc., un bateau d'hélice WiFi" sous-marins ", bien bonne chance.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais des erreurs en abondance.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 3.4.1, et imprimé en PLA sur les deux et Ultimaker 2+ étendus et un Ultimaker 3 étendu.
Le bateau à l'hélice WiFi est un défi à imprimer, à assembler et à câbler et nécessite beaucoup d...e patience.
Avant de commencer, notez que le bateau à l'hélice WiFi contient de grands composants plats qui peuvent ne pas correspondre à votre zone de construction et si elles le font, la déformation peut devenir un problème important, alors utilisez un bord et vos meilleures techniques pour l'adhésion des plaques de construction. Il y a aussi de très petites pièces (si petite que j'ai perdu quelques-unes en les laissant tomber dans l'atelier) et des pièces à parois minces (aussi minces que 1,2 mm), donc avant d'imprimer, testez chaque pièce en utilisant votre trancheuse en mode couche pour confirmer Vos imprimantes ont la capacité d'imprimer les pièces.
J'ai acheté les pièces suivantes pour le bateau à hélice WiFi:
1 kit WiFi Heltec 32 avec écran OLED (en ligne).
1 Timesetl L298N Motor Drive Controller (en ligne).
2 micro 130 moteurs CC (en ligne).
2 10 par 15 mm roulements à billes scellés (j'ai utilisé un PTK-10046 ProtekRC, magasin de loisirs local).
1 ARES AZSZ2503 1200 MAH 2-Cell / 2S 7.4V 25c Lipo Batterie (magasin de loisirs local).
1 connecteur féminin JST (dimensionné pour la batterie, magasin de loisirs local).
4 Vis de set à 5 mm (boutique de loisirs locaux).
1 résistance de 2K ohm (boutique de loisirs locale).
1 km résistant d'Ohm (magasin de loisirs local).
Vous aurez également besoin de la colle cyanoacrylate, du ruban adhésif, du calfeutrage en acrylique, de la pince à nez d'aiguille et des outils de précision assortis de précision, des fichiers de bijoutiers, des coupe-fils, des strip-teaseuses de fil, de la soudure et du fer à souder, et peut-être de la peinture en pulvérisation PLA sûre.
J'ai imprimé "essieu, propulseur.stl", "axe.stl", "Bolt, 8 by 1.25mm.stl", "Bushing.stl", "Cross Journal.stl", "Propeller Port.stl", "Propeller Starboard .Stl "," Yoke Motor.stl "et" Yoke.stl "à une hauteur de couche .1 mm avec 100% rempli. J'ai imprimé les composants restants à une hauteur de couche de 0,15 mm avec 20% de remplissage. J'ai imprimé "Cover.Stl 'et" Deck.stl "avec support PLA, et" Propeller Port.stl "et" Propeller starboard.stl "avec Ultimaker Breakaway Support.
J'ai imprimé les quantités suivantes de chaque partie:
2 essieu, hélice.stl
2 axle.stl
6 boulon, 8 par 1,25 mm
2 bague.stl
1 couverture.stl
4 Cross Journal.stl
1 deck.stl
2 Hull.stl
1 port d'hélice.stl
1 PROPELLET Starboard.stl
2 Motor de joug.stl
6 joug.stl
Avant l'assemblage, le test d'ajustement et la garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non déplacées. Selon les couleurs que vous avez choisies et les paramètres de votre imprimante, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le modèle utilise un assemblage fileté (8 par 1,25 mm) Ainsi un robinet de 8 par 1,25 mm et peut être nécessaire pour nettoyer les composants filetés.
En ce qui concerne les coques, après l'impression, insérez complètement les 6 boulons dans les trous filetés sur le dessus des coques, sous la coque sous l'eau pendant environ une minute, retirer, sécher et secouer pour voir si de l'eau a coulé dans la coque. Si c'est le cas, vaporisez quelques couches lites de peinture en aérosol PLA claire sur la coque, laissez sécher et testez à nouveau.
Programmez le kit WiFi Heltec 32.
Le bateau d'hélice WiFi a été écrit dans l'environnement Arduino pour la puce ESP32. Il existe de nombreux excellents tutoriels autour du Web détaillant l'utilisation de l'environnement Arduino, donc je ne les reproduirai pas ici.
En ce qui concerne la page Web du bateau de l'hélice WiFi, j'ai utilisé un élément HTML "Canvas" pour les graphiques, et les événements Canvas "Touchstart", "TouchMove" et "Touchend" pour le contrôle. Je suis de la croyance que le logiciel devrait fonctionner sur des appareils compatibles au toucher autres que iOS, mais je n'ai pas été en mesure de confirmer que cela le fera.
Avec le kit WiFi Heltec 32 connecté à votre ordinateur via un câble USB, ouvrez l'environnement Arduino et chargez le fichier "WiFipropellerboat.ino". En haut du fichier, il existe une série de fichiers inclués (fichiers se terminant par ".h"). Assurez-vous que la bibliothèque a associé à chacun de ces fichiers installés dans votre environnement Arduino.
WiFi Propeller Boat fonctionne en mode Point d'accès (ce mode est similaire aux différentes petites caméras de sport) en ce que vous connectez directement votre wifi Smart Phone WiFi au WiFi Propeller Boat WiFi. J'ai programmé "WiFiproperse Boat" avec le SSID "WiFiproperse Boat", le mot de passe "WiFipropeller Boat" et l'adresse IP de "192.168.20.20". Avant de compiler et de télécharger le logiciel sur le kit WiFi 32, vous souhaiterez peut-être modifier ces paramètres en fonction de vos besoins.
Une fois que toutes les bibliothèques sont installées et que le SSID, le mot de passe et l'adresse IP sont définis, compiler et télécharger le logiciel sur le WiFikit 32. Une fois téléchargé, le kit WiFi 32 OLED devrait afficher le titre, le droit d'auteur et enfin le nom AP et l'adresse IP. Accédez aux paramètres WiFi sur votre téléphone intelligent et connectez-vous au kit WiFi 32 Point d'accès SSID à l'aide du mot de passe. Lorsque la connexion WiFi est terminée, ouvrez un navigateur Web sur votre téléphone intelligent et accédez à l'adresse IP. En cas de succès, une image de style clignotante "STOP SIGN" devrait apparaître au milieu du kit WiFi 32 OLED, et un point bleu devrait apparaître sur votre affichage de téléphone intelligent. Si vous faites glisser le point bleu vers le haut de l'écran, une flèche vers le haut doit apparaître avec deux indicateurs de niveau de puissance sur le kit WiFi 32 OLED. Faites glisser le point bleu autour de l'affichage du téléphone intelligent et examinez la réponse OLED.
Câblage.
Pour connecter le contrôleur de vitesse du moteur aux moteurs et au kit WiFi 32, j'ai effectué les étapes suivantes.
Le moteur du port (à gauche) est connecté au contrôleur de vitesse du moteur OUT4 ("-") et OUT3 ("+") Terminaux à vis. Souder une longueur de 100 mm de fil rouge AWG 16 au moteur de port "+" terminal, et une longueur de 100 mm de fil noir AWG 16 au moteur de port "-" Terminal. Tirez les extrémités libres de ces fils, puis connectez l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur OUT3 Terminal et l'extrémité libre en conserve du fil noir à la borne OUT4.
Le moteur tribord (à droite) est connecté au contrôleur de vitesse du moteur OUT1 ("-") et OUT2 ("+") Terminaux à vis. Souder une longueur de 100 mm de fil rouge AWG 16 au moteur tribord "+", et une longueur de 100 mm de fil noir AWG 16 au moteur tribord "-" Terminal. Tirez les extrémités libres de ces fils, puis connectez l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur OUT2 Terminal et l'extrémité libre en conserve du fil noir à la borne OUT1.
Sur la carte du contrôleur de vitesse du moteur, le connecteur de style d'en-tête à 6 broches fournit l'interface de commande du moteur. J'ai utilisé un connecteur d'en-tête féminin de style Arduino à 6 broches et soudé les fils de commande entre ce connecteur d'en-tête et le kit WiFi Heltec 32 comme suit:
Souder une longueur de 100 mm de fil vert AWG 26 entre la broche 26 sur le kit WiFi 32 et la broche d'en-tête ENA sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil bleu AWG 26 entre la broche 12 sur le kit WiFi 32 et la broche d'en-tête IN1 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil jaune AWG 26 entre la broche 13 sur le kit WiFi 32 et la broche d'en-tête IN2 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil bleu AWG 26 entre la broche 27 sur le kit WiFi 32 et la broche d'en-tête IN3 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil jaune AWG 26 entre la broche 14 sur le kit WiFi 32 et la broche d'en-tête IN4 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil vert AWG 26 entre la broche 25 sur le kit WiFi 32 et la broche d'en-tête ENB sur l'en-tête du contrôleur de vitesse du moteur.
Le contrôleur de vitesse du moteur fournit également un 5VDC régulé sur la borne à vis à 3 broches que j'ai utilisée pour alimenter le kit WiFi 32. Pour connecter l'alimentation du contrôleur de vitesse du moteur au kit wifi 32, souder une longueur de 100 mm de fil rouge AWG 26 au wifi Kit 32 PIN 5V. Ensuite, soudez une longueur de 100 mm de fil noir AWG 26 au kit wifi 32 Pin GND. Étouffer les extrémités libres des deux fils, puis connecter l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur + la broche 5V sur le connecteur à vis à 3 broches et connecter l'extrémité libre en conserve du fil noir à la broche de vitesse du moteur GND sur le connecteur à vis à 3 broches.
L'ensemble du circuit est alimenté par la batterie Lipo 7.4VDC 1200MA. Pour connecter la batterie au contrôleur de vitesse du moteur, fixez le fil rouge du connecteur femelle JST au contrôleur de vitesse du moteur + broche 12V sur la borne à vis à 3 broches et le fil noir du connecteur femelle JST à la broche GND sur la borne à vis à 3 broches ( Ce terminal partage des terrains avec le kit wifi 32 terre).
Et enfin, pour surveiller la tension de la batterie, fixez une extrémité de la résistance de 2K OHM au contrôleur de vitesse du moteur +12 broche sur la borne à vis à 3 broches. Fixez ensuite une extrémité de la résistance de 1k ohm à la broche GND du contrôleur de vitesse du moteur sur la borne à vis à 3 broches. Ensuite, soudez les deux extrémités libres des résistances ensemble, puis soudez une longueur de 100 mm de fil jaune AWG 26 entre le joint de soudure résistant et la broche 36 Le kit WiFi 32.
Vérifiez tout le câblage.
Assemblez les arbres d'entraînement.
Deux assemblages de joug inférieur et deux assemblages de joug supérieur sont nécessaires pour assembler les arbres d'entraînement.
Les pièces requises pour un assemblage de joug inférieur sont de 2 "Yoke.stl" et 1 "Cross Journal.stl". Commencez par claquer un journal croisé dans l'un des Yokes comme indiqué. J'ai utilisé une pince à nez d'aiguille pour aider à cette étape. Ensuite, prenez soigneusement le joug restant dans le Journal Cross. Une fois terminé, l'assemblage doit tourner facilement et en douceur sur les deux axes. Répétez ce processus pour le deuxième assemblage de joug inférieur.
Les pièces nécessaires pour assembler un empiècement supérieur sont de 1 "Yoke.stl", 1 "Jouer Motor.stl" et 1 "Cross Journal.stl", et ils assemblent la même chose que l'assemblage inférieur de l'emploi. Répétez le processus pour le deuxième assemblage de joug supérieur.
Avec les assemblages de joug supérieur et inférieur terminé, appuyez ensuite sur "Port de propulseur" sur ON du "essieu, propulseur.stl". Cela devrait être un ajustement très serré. Répétez ce processus avec "propulseur starboard.stl" et l'essieu de l'hélice restante.
Ensuite, appuyez sur une "bague" dans l'un des roulements scellés de 10 par 15 par 4 mm. Cela devrait être un ajustement serré. Répétez ce processus avec la bague et le roulement restant.
Appuyez sur l'un des assemblages de bague / roulement sur l'un des essieux de l'hélice comme indiqué, à 4 mm de l'extrémité de l'essieu. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur l'un des assemblages de joug inférieur sur l'un des essieux de l'hélice comme indiqué, en vous assurant que l'extrémité de l'essieu est rincé avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur un "essieu.stl" dans l'un des jougs libres sur l'assemblage inférieur de l'emploi comme indiqué, en vous assurant que l'extrémité de l'essieu est à la chasse avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur un assemblage de joug supérieur sur l'extrémité libre de "essieu" comme indiqué, en vous assurant que l'extrémité de l'essieu est rincé avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
À l'aide d'une clé hexagonale de 1,5 mm, enfilez les vis de réglage de 3 par 5 mm dans les yokes du moteur.
Assemblage final.
Appuyez sur les moteurs dans leurs positions dans le pont comme indiqué. Les fils du moteur seront proches de l'extérieur de la coque, et les évents du moteur seront vers le trou elliptique dans les supports de moteur du pont.
Appliquez une perle de calfeutrage de silicium autour du dessous des 4 trous dans "Deck.stl", puis fixez un "Hull.stl" sous le pont en utilisant deux "Bolt, 8 par 1,25 mm.stl" comme indiqué. Répétez ce processus avec la coque restante.
Installez les deux autres "boulon, 8 par 1,25 mm" "dans les deux trous restants dans les coques (ces trous sont destinés aux caractéristiques" futures ").
Insérez soigneusement l'ensemble de l'essieu du port d'hélice, l'extrémité du joug du moteur d'abord, dans le trou arrière de la coque à port, glissant complètement en place jusqu'à ce que le joug de moteur soit entièrement engagé sur l'arbre du moteur à port et que le roulement est rincé avec la surface de la coque extérieure (ceci (ceci sera un ajustement serré). Serrez soigneusement les deux vis de réglage dans le joug du moteur jusqu'à ce que le joug soit solidement fixé au moteur. Répétez ce processus avec l'assemblage d'essieu tribord d'hélice sur la coque tribord.
Placer le contrôleur de vitesse du moteur et le kit WiFi 32 en position comme indiqué et sécurisé en place avec du ruban adhésif.
Placez le kit WiFi Heltec 32 en position comme indiqué et sécurisé en place avec du ruban adhésif.
Positionnez la batterie entre le contrôleur de vitesse du moteur et le kit WiFi Heltec 32 comme indiqué.
Branchez la batterie dans le contrôleur de vitesse du moteur et vérifiez le bon fonctionnement d'affichage.
Test.
Avec l'assemblage complet et avant le premier test d'eau, j'effectue les tâches suivantes:
Placer le bateau d'hélice WiFi sur une surface plane avec les hélices suspendues (sur le bord).
Branchez la batterie.
Connectez un appareil compatible WiFi à la WiFi Propeller Boat WiFi (mon bateau d'hélice WiFi SSID est "WiFiproperse Boat").
Ouvrez un navigateur Web sur un appareil compatible WiFi. Accédez à l'adresse IP du bateau de l'hélice WiFi (mon adresse IP de bateau à l'hélice WiFi est 192.168.20.20).
Lorsque le point bleu apparaît sur le navigateur Web, une image de style "STOP SIGN" apparaît clignotant sur le kit WiFi 32 OLED.
Faites glisser le point vers le centre supérieur de l'écran et l'affichage OLED affiche une flèche vers le haut et 2 indicateurs de niveau d'alimentation (un pour le moteur du port et une seconde pour le moteur tribord). Assurez-vous que les hélices tournent dans la bonne direction.
Déplacez le point vers le bas au centre de l'écran et surveillez les indications OLED appropriées et le mouvement de l'hélice.
Avec ce complet, placez la couverture sur la baie d'électronique dans le pont, placez le bateau d'hélice WiFi dans l'eau, et vous allez!
C'est ainsi que j'ai imprimé, programmé, câblé et assemblé le bateau d'hélice WiFi.
J'espère que vous l'appréciez!
Designer
Greg ZumwaltDescription du modèle 3D
Un bateau à éloignement à distance a permis à la télécommande Wi-FiL'été se termine dans l'Oklahoma, mais les enfants, les petits-enfants, le...s nièces, les neveux et, bien, à peu près tout le monde que nous connaissons sont toujours dans le lac Zumwalt pour se rafraîchir. Donc, pour encore plus de divertissements de jouets en piscine, j'ai décidé de concevoir un dernier bateau pour la saison estivale, WiFi Propeller Boat.
Paddle Boat est une coque jumelle, un bateau à l'hélice à compteur twin contrôlé via le WiFi à l'aide d'un téléphone intelligent, d'une tablette ou d'un autre appareil compatible tactile. Le bateau à l'hélice WiFi crée un point d'accès WiFi (un peu comme les petites caméras de sport) auxquelles vous vous connectez via les paramètres WiFi de l'appareil compatible WiFi. Ensuite, en utilisant votre navigateur Web WiFi Touch Active Device, vous accédez simplement à la page Web du bateau de l'hélice WiFi et vous allez! Les commandes du bateau à l'hélice WiFi sont identiques à celles de ma conception de paddle wifi, il est donc familier pour les petits-enfants. Et dans cette version, j'ai ajouté une surveillance de la tension de la batterie à l'affichage, donc, espérons-le, une baignade n'est pas nécessaire pour récupérer le bateau d'hélice wifi lorsque la batterie s'épuise.
Pour garder l'électronique à sec, le bateau à l'hélice WiFi utilise des "joints universels" imprimés en 3D pour permettre le positionnement de l'électronique au-dessus de la ligne d'eau. J'ai inclus une vidéo des joints universels dans un luminaire de test pour illustrer comment ils fonctionnent.
Un mot de prudence; J'ai conçu le bateau d'hélice wifi pour être "résistant" et non "pas" à l'épreuve de l'eau ", donc si une vague voyou, un petit-enfant, une nièce, un neveu, etc., un bateau d'hélice WiFi" sous-marins ", bien bonne chance.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais des erreurs en abondance.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 3.4.1, et imprimé en PLA sur les deux et Ultimaker 2+ étendus et un Ultimaker 3 étendu.
Paramètres d'impression du modèle 3D
Achetez, imprimez et préparez les pièces.Le bateau à l'hélice WiFi est un défi à imprimer, à assembler et à câbler et nécessite beaucoup d...e patience.
Avant de commencer, notez que le bateau à l'hélice WiFi contient de grands composants plats qui peuvent ne pas correspondre à votre zone de construction et si elles le font, la déformation peut devenir un problème important, alors utilisez un bord et vos meilleures techniques pour l'adhésion des plaques de construction. Il y a aussi de très petites pièces (si petite que j'ai perdu quelques-unes en les laissant tomber dans l'atelier) et des pièces à parois minces (aussi minces que 1,2 mm), donc avant d'imprimer, testez chaque pièce en utilisant votre trancheuse en mode couche pour confirmer Vos imprimantes ont la capacité d'imprimer les pièces.
J'ai acheté les pièces suivantes pour le bateau à hélice WiFi:
1 kit WiFi Heltec 32 avec écran OLED (en ligne).
1 Timesetl L298N Motor Drive Controller (en ligne).
2 micro 130 moteurs CC (en ligne).
2 10 par 15 mm roulements à billes scellés (j'ai utilisé un PTK-10046 ProtekRC, magasin de loisirs local).
1 ARES AZSZ2503 1200 MAH 2-Cell / 2S 7.4V 25c Lipo Batterie (magasin de loisirs local).
1 connecteur féminin JST (dimensionné pour la batterie, magasin de loisirs local).
4 Vis de set à 5 mm (boutique de loisirs locaux).
1 résistance de 2K ohm (boutique de loisirs locale).
1 km résistant d'Ohm (magasin de loisirs local).
Vous aurez également besoin de la colle cyanoacrylate, du ruban adhésif, du calfeutrage en acrylique, de la pince à nez d'aiguille et des outils de précision assortis de précision, des fichiers de bijoutiers, des coupe-fils, des strip-teaseuses de fil, de la soudure et du fer à souder, et peut-être de la peinture en pulvérisation PLA sûre.
J'ai imprimé "essieu, propulseur.stl", "axe.stl", "Bolt, 8 by 1.25mm.stl", "Bushing.stl", "Cross Journal.stl", "Propeller Port.stl", "Propeller Starboard .Stl "," Yoke Motor.stl "et" Yoke.stl "à une hauteur de couche .1 mm avec 100% rempli. J'ai imprimé les composants restants à une hauteur de couche de 0,15 mm avec 20% de remplissage. J'ai imprimé "Cover.Stl 'et" Deck.stl "avec support PLA, et" Propeller Port.stl "et" Propeller starboard.stl "avec Ultimaker Breakaway Support.
J'ai imprimé les quantités suivantes de chaque partie:
2 essieu, hélice.stl
2 axle.stl
6 boulon, 8 par 1,25 mm
2 bague.stl
1 couverture.stl
4 Cross Journal.stl
1 deck.stl
2 Hull.stl
1 port d'hélice.stl
1 PROPELLET Starboard.stl
2 Motor de joug.stl
6 joug.stl
Avant l'assemblage, le test d'ajustement et la garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non déplacées. Selon les couleurs que vous avez choisies et les paramètres de votre imprimante, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le modèle utilise un assemblage fileté (8 par 1,25 mm) Ainsi un robinet de 8 par 1,25 mm et peut être nécessaire pour nettoyer les composants filetés.
En ce qui concerne les coques, après l'impression, insérez complètement les 6 boulons dans les trous filetés sur le dessus des coques, sous la coque sous l'eau pendant environ une minute, retirer, sécher et secouer pour voir si de l'eau a coulé dans la coque. Si c'est le cas, vaporisez quelques couches lites de peinture en aérosol PLA claire sur la coque, laissez sécher et testez à nouveau.
Programmez le kit WiFi Heltec 32.
Le bateau d'hélice WiFi a été écrit dans l'environnement Arduino pour la puce ESP32. Il existe de nombreux excellents tutoriels autour du Web détaillant l'utilisation de l'environnement Arduino, donc je ne les reproduirai pas ici.
En ce qui concerne la page Web du bateau de l'hélice WiFi, j'ai utilisé un élément HTML "Canvas" pour les graphiques, et les événements Canvas "Touchstart", "TouchMove" et "Touchend" pour le contrôle. Je suis de la croyance que le logiciel devrait fonctionner sur des appareils compatibles au toucher autres que iOS, mais je n'ai pas été en mesure de confirmer que cela le fera.
Avec le kit WiFi Heltec 32 connecté à votre ordinateur via un câble USB, ouvrez l'environnement Arduino et chargez le fichier "WiFipropellerboat.ino". En haut du fichier, il existe une série de fichiers inclués (fichiers se terminant par ".h"). Assurez-vous que la bibliothèque a associé à chacun de ces fichiers installés dans votre environnement Arduino.
WiFi Propeller Boat fonctionne en mode Point d'accès (ce mode est similaire aux différentes petites caméras de sport) en ce que vous connectez directement votre wifi Smart Phone WiFi au WiFi Propeller Boat WiFi. J'ai programmé "WiFiproperse Boat" avec le SSID "WiFiproperse Boat", le mot de passe "WiFipropeller Boat" et l'adresse IP de "192.168.20.20". Avant de compiler et de télécharger le logiciel sur le kit WiFi 32, vous souhaiterez peut-être modifier ces paramètres en fonction de vos besoins.
Une fois que toutes les bibliothèques sont installées et que le SSID, le mot de passe et l'adresse IP sont définis, compiler et télécharger le logiciel sur le WiFikit 32. Une fois téléchargé, le kit WiFi 32 OLED devrait afficher le titre, le droit d'auteur et enfin le nom AP et l'adresse IP. Accédez aux paramètres WiFi sur votre téléphone intelligent et connectez-vous au kit WiFi 32 Point d'accès SSID à l'aide du mot de passe. Lorsque la connexion WiFi est terminée, ouvrez un navigateur Web sur votre téléphone intelligent et accédez à l'adresse IP. En cas de succès, une image de style clignotante "STOP SIGN" devrait apparaître au milieu du kit WiFi 32 OLED, et un point bleu devrait apparaître sur votre affichage de téléphone intelligent. Si vous faites glisser le point bleu vers le haut de l'écran, une flèche vers le haut doit apparaître avec deux indicateurs de niveau de puissance sur le kit WiFi 32 OLED. Faites glisser le point bleu autour de l'affichage du téléphone intelligent et examinez la réponse OLED.
Câblage.
Pour connecter le contrôleur de vitesse du moteur aux moteurs et au kit WiFi 32, j'ai effectué les étapes suivantes.
Le moteur du port (à gauche) est connecté au contrôleur de vitesse du moteur OUT4 ("-") et OUT3 ("+") Terminaux à vis. Souder une longueur de 100 mm de fil rouge AWG 16 au moteur de port "+" terminal, et une longueur de 100 mm de fil noir AWG 16 au moteur de port "-" Terminal. Tirez les extrémités libres de ces fils, puis connectez l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur OUT3 Terminal et l'extrémité libre en conserve du fil noir à la borne OUT4.
Le moteur tribord (à droite) est connecté au contrôleur de vitesse du moteur OUT1 ("-") et OUT2 ("+") Terminaux à vis. Souder une longueur de 100 mm de fil rouge AWG 16 au moteur tribord "+", et une longueur de 100 mm de fil noir AWG 16 au moteur tribord "-" Terminal. Tirez les extrémités libres de ces fils, puis connectez l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur OUT2 Terminal et l'extrémité libre en conserve du fil noir à la borne OUT1.
Sur la carte du contrôleur de vitesse du moteur, le connecteur de style d'en-tête à 6 broches fournit l'interface de commande du moteur. J'ai utilisé un connecteur d'en-tête féminin de style Arduino à 6 broches et soudé les fils de commande entre ce connecteur d'en-tête et le kit WiFi Heltec 32 comme suit:
Souder une longueur de 100 mm de fil vert AWG 26 entre la broche 26 sur le kit WiFi 32 et la broche d'en-tête ENA sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil bleu AWG 26 entre la broche 12 sur le kit WiFi 32 et la broche d'en-tête IN1 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil jaune AWG 26 entre la broche 13 sur le kit WiFi 32 et la broche d'en-tête IN2 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil bleu AWG 26 entre la broche 27 sur le kit WiFi 32 et la broche d'en-tête IN3 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil jaune AWG 26 entre la broche 14 sur le kit WiFi 32 et la broche d'en-tête IN4 sur l'en-tête du contrôleur de vitesse du moteur.
Souder une longueur de 100 mm de fil vert AWG 26 entre la broche 25 sur le kit WiFi 32 et la broche d'en-tête ENB sur l'en-tête du contrôleur de vitesse du moteur.
Le contrôleur de vitesse du moteur fournit également un 5VDC régulé sur la borne à vis à 3 broches que j'ai utilisée pour alimenter le kit WiFi 32. Pour connecter l'alimentation du contrôleur de vitesse du moteur au kit wifi 32, souder une longueur de 100 mm de fil rouge AWG 26 au wifi Kit 32 PIN 5V. Ensuite, soudez une longueur de 100 mm de fil noir AWG 26 au kit wifi 32 Pin GND. Étouffer les extrémités libres des deux fils, puis connecter l'extrémité libre en conserve du fil rouge au contrôleur de vitesse du moteur + la broche 5V sur le connecteur à vis à 3 broches et connecter l'extrémité libre en conserve du fil noir à la broche de vitesse du moteur GND sur le connecteur à vis à 3 broches.
L'ensemble du circuit est alimenté par la batterie Lipo 7.4VDC 1200MA. Pour connecter la batterie au contrôleur de vitesse du moteur, fixez le fil rouge du connecteur femelle JST au contrôleur de vitesse du moteur + broche 12V sur la borne à vis à 3 broches et le fil noir du connecteur femelle JST à la broche GND sur la borne à vis à 3 broches ( Ce terminal partage des terrains avec le kit wifi 32 terre).
Et enfin, pour surveiller la tension de la batterie, fixez une extrémité de la résistance de 2K OHM au contrôleur de vitesse du moteur +12 broche sur la borne à vis à 3 broches. Fixez ensuite une extrémité de la résistance de 1k ohm à la broche GND du contrôleur de vitesse du moteur sur la borne à vis à 3 broches. Ensuite, soudez les deux extrémités libres des résistances ensemble, puis soudez une longueur de 100 mm de fil jaune AWG 26 entre le joint de soudure résistant et la broche 36 Le kit WiFi 32.
Vérifiez tout le câblage.
Assemblez les arbres d'entraînement.
Deux assemblages de joug inférieur et deux assemblages de joug supérieur sont nécessaires pour assembler les arbres d'entraînement.
Les pièces requises pour un assemblage de joug inférieur sont de 2 "Yoke.stl" et 1 "Cross Journal.stl". Commencez par claquer un journal croisé dans l'un des Yokes comme indiqué. J'ai utilisé une pince à nez d'aiguille pour aider à cette étape. Ensuite, prenez soigneusement le joug restant dans le Journal Cross. Une fois terminé, l'assemblage doit tourner facilement et en douceur sur les deux axes. Répétez ce processus pour le deuxième assemblage de joug inférieur.
Les pièces nécessaires pour assembler un empiècement supérieur sont de 1 "Yoke.stl", 1 "Jouer Motor.stl" et 1 "Cross Journal.stl", et ils assemblent la même chose que l'assemblage inférieur de l'emploi. Répétez le processus pour le deuxième assemblage de joug supérieur.
Avec les assemblages de joug supérieur et inférieur terminé, appuyez ensuite sur "Port de propulseur" sur ON du "essieu, propulseur.stl". Cela devrait être un ajustement très serré. Répétez ce processus avec "propulseur starboard.stl" et l'essieu de l'hélice restante.
Ensuite, appuyez sur une "bague" dans l'un des roulements scellés de 10 par 15 par 4 mm. Cela devrait être un ajustement serré. Répétez ce processus avec la bague et le roulement restant.
Appuyez sur l'un des assemblages de bague / roulement sur l'un des essieux de l'hélice comme indiqué, à 4 mm de l'extrémité de l'essieu. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur l'un des assemblages de joug inférieur sur l'un des essieux de l'hélice comme indiqué, en vous assurant que l'extrémité de l'essieu est rincé avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur un "essieu.stl" dans l'un des jougs libres sur l'assemblage inférieur de l'emploi comme indiqué, en vous assurant que l'extrémité de l'essieu est à la chasse avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
Appuyez sur un assemblage de joug supérieur sur l'extrémité libre de "essieu" comme indiqué, en vous assurant que l'extrémité de l'essieu est rincé avec la surface intérieure du joug comme indiqué. Cela devrait être un ajustement serré. Répétez ce processus avec l'assemblage restant.
À l'aide d'une clé hexagonale de 1,5 mm, enfilez les vis de réglage de 3 par 5 mm dans les yokes du moteur.
Assemblage final.
Appuyez sur les moteurs dans leurs positions dans le pont comme indiqué. Les fils du moteur seront proches de l'extérieur de la coque, et les évents du moteur seront vers le trou elliptique dans les supports de moteur du pont.
Appliquez une perle de calfeutrage de silicium autour du dessous des 4 trous dans "Deck.stl", puis fixez un "Hull.stl" sous le pont en utilisant deux "Bolt, 8 par 1,25 mm.stl" comme indiqué. Répétez ce processus avec la coque restante.
Installez les deux autres "boulon, 8 par 1,25 mm" "dans les deux trous restants dans les coques (ces trous sont destinés aux caractéristiques" futures ").
Insérez soigneusement l'ensemble de l'essieu du port d'hélice, l'extrémité du joug du moteur d'abord, dans le trou arrière de la coque à port, glissant complètement en place jusqu'à ce que le joug de moteur soit entièrement engagé sur l'arbre du moteur à port et que le roulement est rincé avec la surface de la coque extérieure (ceci (ceci sera un ajustement serré). Serrez soigneusement les deux vis de réglage dans le joug du moteur jusqu'à ce que le joug soit solidement fixé au moteur. Répétez ce processus avec l'assemblage d'essieu tribord d'hélice sur la coque tribord.
Placer le contrôleur de vitesse du moteur et le kit WiFi 32 en position comme indiqué et sécurisé en place avec du ruban adhésif.
Placez le kit WiFi Heltec 32 en position comme indiqué et sécurisé en place avec du ruban adhésif.
Positionnez la batterie entre le contrôleur de vitesse du moteur et le kit WiFi Heltec 32 comme indiqué.
Branchez la batterie dans le contrôleur de vitesse du moteur et vérifiez le bon fonctionnement d'affichage.
Test.
Avec l'assemblage complet et avant le premier test d'eau, j'effectue les tâches suivantes:
Placer le bateau d'hélice WiFi sur une surface plane avec les hélices suspendues (sur le bord).
Branchez la batterie.
Connectez un appareil compatible WiFi à la WiFi Propeller Boat WiFi (mon bateau d'hélice WiFi SSID est "WiFiproperse Boat").
Ouvrez un navigateur Web sur un appareil compatible WiFi. Accédez à l'adresse IP du bateau de l'hélice WiFi (mon adresse IP de bateau à l'hélice WiFi est 192.168.20.20).
Lorsque le point bleu apparaît sur le navigateur Web, une image de style "STOP SIGN" apparaît clignotant sur le kit WiFi 32 OLED.
Faites glisser le point vers le centre supérieur de l'écran et l'affichage OLED affiche une flèche vers le haut et 2 indicateurs de niveau d'alimentation (un pour le moteur du port et une seconde pour le moteur tribord). Assurez-vous que les hélices tournent dans la bonne direction.
Déplacez le point vers le bas au centre de l'écran et surveillez les indications OLED appropriées et le mouvement de l'hélice.
Avec ce complet, placez la couverture sur la baie d'électronique dans le pont, placez le bateau d'hélice WiFi dans l'eau, et vous allez!
C'est ainsi que j'ai imprimé, programmé, câblé et assemblé le bateau d'hélice WiFi.
J'espère que vous l'appréciez!