Broc 3d pour imprimer
5441 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
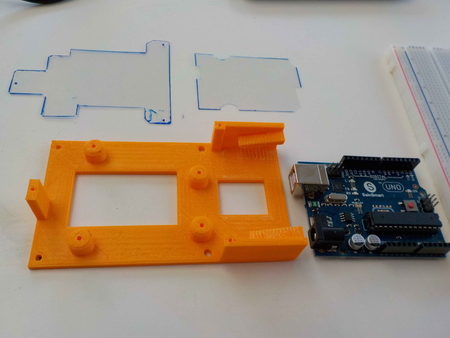
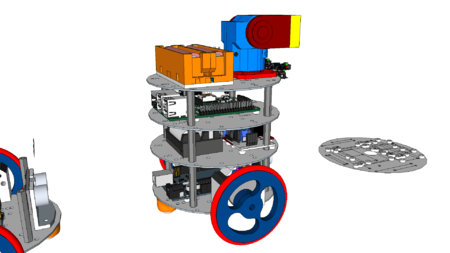
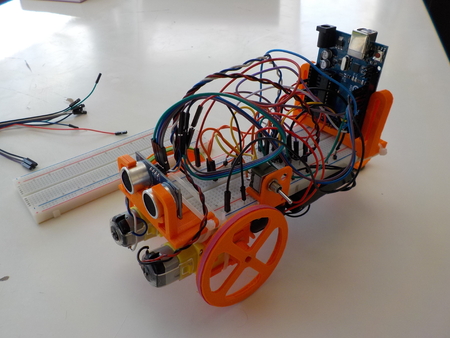
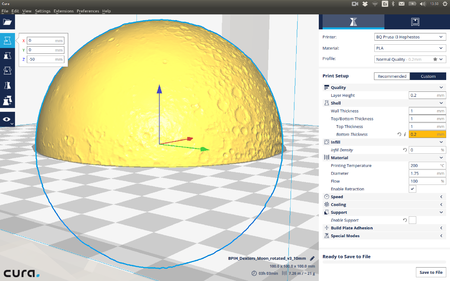
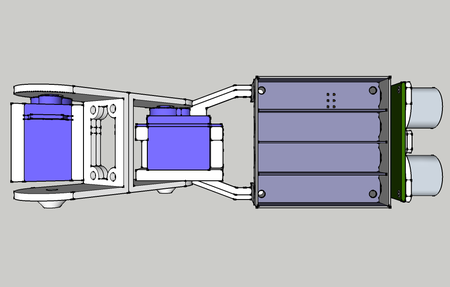
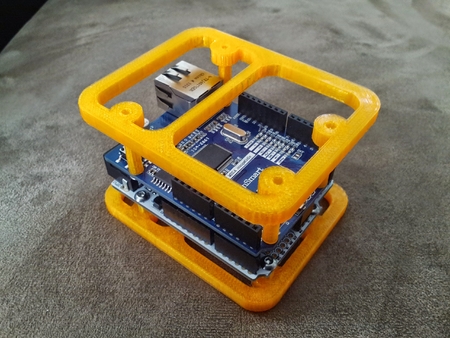
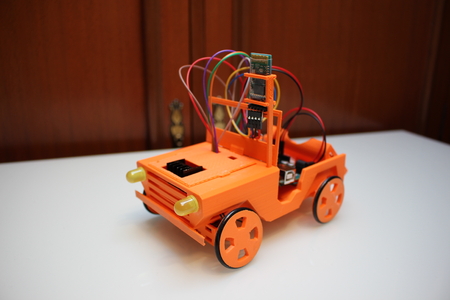
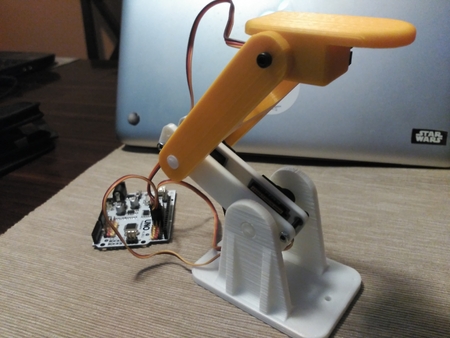
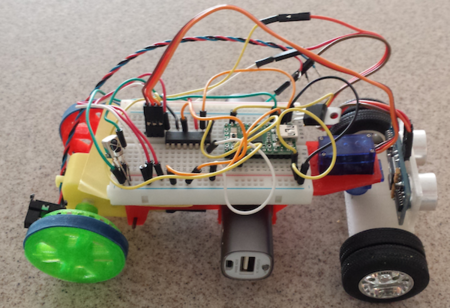
Un véhicule robotique simple mais assez capable, destiné à être construit principalement à partir de choses que les gens ont déjà traîné. Un Gearmotor, un servo qui double pour la direction et la construction d'une carte des obstacles devant le bot. Conçu pour l'impression 3D sur une plate-forme de construction 100x100 mm. Dans OpenSCAD, vous pouvez donc modifier pour s'adapter à vos propres pièces si nécessaire. (Vous devrez mettre les fichiers de cube servo-arm et rond dans votre dossier de bibliothèque OpenSCAD si vous ne les avez pas déjà.)
Le logiciel de base (avec Pinouts pour Teensy 2.0) est actuellement disponible sur https://codebender.cc/user/pw314 (Broc1-Broc4).
- Contrôleur compatible Arduino à planche à pain (Tensy, Trinket Pro, etc.)
- planche à pain sans ...soudure à moitié (de préférence avec deux rails de puissance et en bas adhésif)
- puce de pilote de moteur L293D ou équivalent
- Gearmotor à deux arbres
- Micro Servo
- Définder à ultrasons
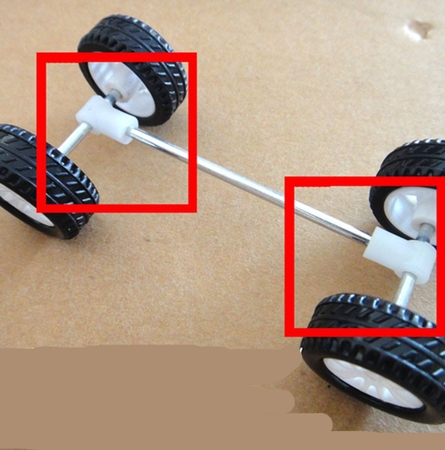
- essieu et roues
- Petit chargeur USB ou batterie 6.6 / 7.4vlipo
- régulateur de tension 7805 (si vous utilisez Lipo)
- récepteur de télécommande IR (facultatif)
- interrupteur optique à fente (facultatif)
- Bands de caoutchouc ou pneus
- liens zip
- Fils de cavalier
Designer
rp10007Description du modèle 3D
Voiture robotique de base. (OK, le nom vient vraiment de la conception des roues afin que vous puissiez utiliser des élastiques de supermarché Brocc...oli-Bunch pour les pneus.)Un véhicule robotique simple mais assez capable, destiné à être construit principalement à partir de choses que les gens ont déjà traîné. Un Gearmotor, un servo qui double pour la direction et la construction d'une carte des obstacles devant le bot. Conçu pour l'impression 3D sur une plate-forme de construction 100x100 mm. Dans OpenSCAD, vous pouvez donc modifier pour s'adapter à vos propres pièces si nécessaire. (Vous devrez mettre les fichiers de cube servo-arm et rond dans votre dossier de bibliothèque OpenSCAD si vous ne les avez pas déjà.)
Le logiciel de base (avec Pinouts pour Teensy 2.0) est actuellement disponible sur https://codebender.cc/user/pw314 (Broc1-Broc4).
Paramètres d'impression du modèle 3D
- PLA ou ABS ou votre autre filament préféré- Contrôleur compatible Arduino à planche à pain (Tensy, Trinket Pro, etc.)
- planche à pain sans ...soudure à moitié (de préférence avec deux rails de puissance et en bas adhésif)
- puce de pilote de moteur L293D ou équivalent
- Gearmotor à deux arbres
- Micro Servo
- Définder à ultrasons
- essieu et roues
- Petit chargeur USB ou batterie 6.6 / 7.4vlipo
- régulateur de tension 7805 (si vous utilisez Lipo)
- récepteur de télécommande IR (facultatif)
- interrupteur optique à fente (facultatif)
- Bands de caoutchouc ou pneus
- liens zip
- Fils de cavalier