Diybio orbital shaker 3d pour imprimer


2837 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
INTRODUCTION
Il s'agit de ...la version 2.0 de notre shaker orbital Diybio. Nous ajouterons plus d'informations, de vidéos et d'instructions d'assemblage dans un avenir proche.
Toutes les électroniques sont les mêmes que la version originale. Il en va de même pour tout le code Arduino.
Le diagramme électronique est inclus ci-dessus dans les images. Le code Arduino sera fourni ci-dessous. Consultez notre prototype ici pour des conseils sur l'assemblage: https://www.thingiverse.com/thing:2633507
... jusqu'à ce que nous obtenions plus de documentation pour cette version.
Le fichier Sketchup est inclus. Il contient à la fois le prototype d'origine et la nouvelle version. Il a également des conceptions non incluses dans V 2.0, mais vous êtes libre de les utiliser / les modifier.
Vidéo de celui-ci en action:
Code arduino
Sketch Arduino utilisé:
// Contrôle du moteur pas à pas
//
// par Achim Pieters, www.studiopieters.nl
//
//
// définit les numéros d'épingles
const int steppin = 7;
const int dirpin = 8;
int CustomDelay, CustomDelayMappy; // définit les variables
void setup () {
// définit les deux broches en sorties
PinMode (steppin, sortie);
pinmode (dirpin, sortie);
DigitalWrite (Dirpin, High); // permet au moteur de se déplacer dans une direction particulière
}
VOID LOOP () {
CustomDeLayMapt = SpeedUp (); // obtient des valeurs de retard personnalisées à partir de la fonction d'accélération personnalisée
// fait des pules avec un délai personnalisé, selon le potentiomètre, à partir de laquelle la vitesse du moteur dépend
DigitalWrite (Steppin, High);
DelayMicRosecondes (CustomDeLayMapp);
DigitalWrite (Steppin, Low);
DelayMicRosecondes (CustomDeLayMapp);
}
// fonction pour lire le potentiomètre
int speedup () {
int coustomdelay = analogread (a0); // lit le potentiomètre
int newCustom = map (personnalisédelay, 0, 1023, 300,4000); // convient les valeurs de lecture du potentiomètre de 0 à 1023 dans les valeurs de retard souhaitées (300 à 4000)
return newCustom;
}
Moteur pas à pas 12V
Pololu DRV8825 STEPUR
Arduino Micro Pro
Potentiomètre
Interrupteur à bascule
Adaptateur CC (femme)
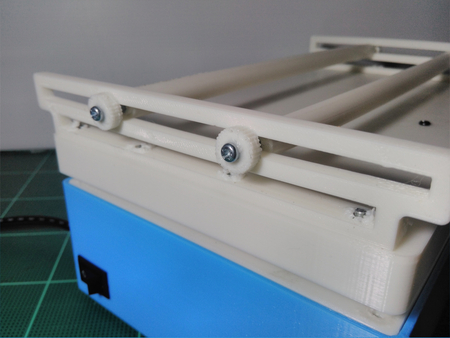
Roulements 608z (...x5)
Boulons de 3 mm
Noix de 3 mm
Vis de 3 mm
Designer
ProgressTHDescription du modèle 3D
Il s'agit d'un shaker orbital de laboratoire relativement important utilisant un moteur pas à pas 12V et un nano Arduino.INTRODUCTION
Il s'agit de ...la version 2.0 de notre shaker orbital Diybio. Nous ajouterons plus d'informations, de vidéos et d'instructions d'assemblage dans un avenir proche.
Toutes les électroniques sont les mêmes que la version originale. Il en va de même pour tout le code Arduino.
Le diagramme électronique est inclus ci-dessus dans les images. Le code Arduino sera fourni ci-dessous. Consultez notre prototype ici pour des conseils sur l'assemblage: https://www.thingiverse.com/thing:2633507
... jusqu'à ce que nous obtenions plus de documentation pour cette version.
Le fichier Sketchup est inclus. Il contient à la fois le prototype d'origine et la nouvelle version. Il a également des conceptions non incluses dans V 2.0, mais vous êtes libre de les utiliser / les modifier.
Vidéo de celui-ci en action:
Code arduino
Sketch Arduino utilisé:
// Contrôle du moteur pas à pas
//
// par Achim Pieters, www.studiopieters.nl
//
//
// définit les numéros d'épingles
const int steppin = 7;
const int dirpin = 8;
int CustomDelay, CustomDelayMappy; // définit les variables
void setup () {
// définit les deux broches en sorties
PinMode (steppin, sortie);
pinmode (dirpin, sortie);
DigitalWrite (Dirpin, High); // permet au moteur de se déplacer dans une direction particulière
}
VOID LOOP () {
CustomDeLayMapt = SpeedUp (); // obtient des valeurs de retard personnalisées à partir de la fonction d'accélération personnalisée
// fait des pules avec un délai personnalisé, selon le potentiomètre, à partir de laquelle la vitesse du moteur dépend
DigitalWrite (Steppin, High);
DelayMicRosecondes (CustomDeLayMapp);
DigitalWrite (Steppin, Low);
DelayMicRosecondes (CustomDeLayMapp);
}
// fonction pour lire le potentiomètre
int speedup () {
int coustomdelay = analogread (a0); // lit le potentiomètre
int newCustom = map (personnalisédelay, 0, 1023, 300,4000); // convient les valeurs de lecture du potentiomètre de 0 à 1023 dans les valeurs de retard souhaitées (300 à 4000)
return newCustom;
}
Paramètres d'impression du modèle 3D
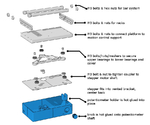
Parties:Moteur pas à pas 12V
Pololu DRV8825 STEPUR
Arduino Micro Pro
Potentiomètre
Interrupteur à bascule
Adaptateur CC (femme)
Roulements 608z (...x5)
Boulons de 3 mm
Noix de 3 mm
Vis de 3 mm