E-nable - yulia custom hand 3d pour imprimer










3913 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
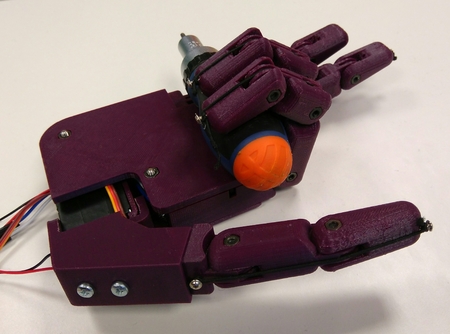
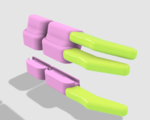
Dans le cadre du projet E-Nable, j'ai été chargé de concevoir une main personnalisée pour une fille dans le besoin qui ne bénéficierait pas des appareils E-Nable standard.
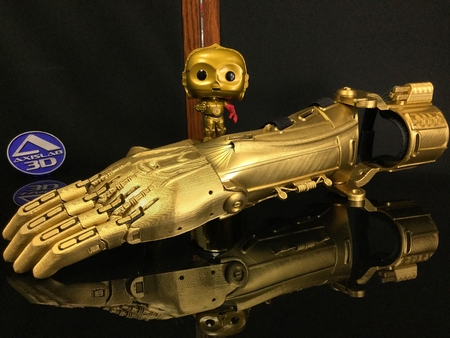
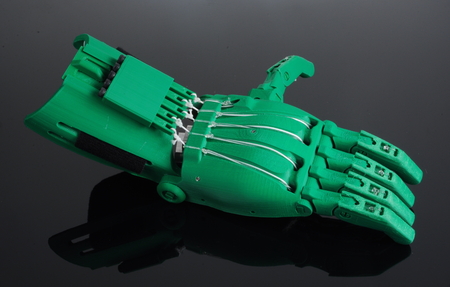
J'ai conçu le modèle à partir de zéro dans Fusion360. Il s'agit du 4e et dernier prototype qui est actuellement testé par le nom de mains Yu-Lia
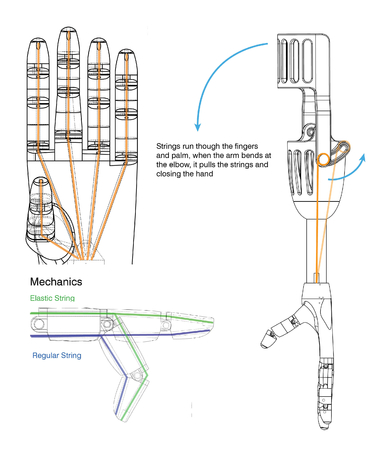
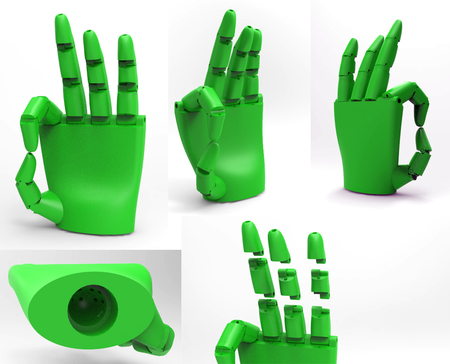
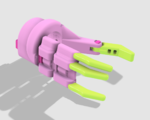
La conception est basée sur le mouvement "Pinch" qui est crucial pour une bonne fonction à main. Yu-Lia avait toujours un doigt fonctionnel (bien que déformé) que j'ai intégré dans la fonction de conception pour agir comme l'index.
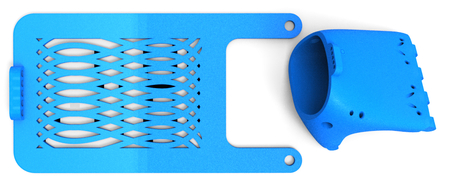
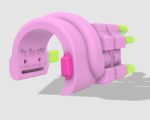
Dans la conception, j'ai utilisé un scan 3D de sa main et modélisé la main autour de lui. Les mécanismes sont similaires au Raptor, mais s'appuient fortement sur le mouvement du doigt restant de Yu-Lia qui tire essentiellement le pouce imprimé en 3D.
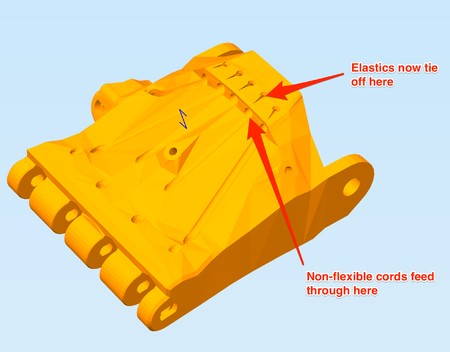
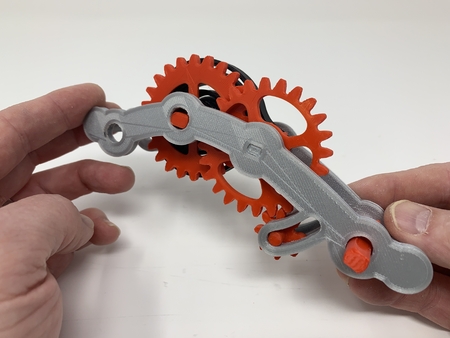
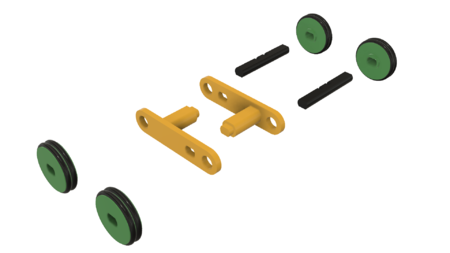
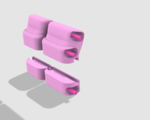
La conception est livrée avec 3 liaisons de tendeur alternatives pour fournir différents niveaux de levier dans le fil de tension.
Les liens du tendeur et les pointes du doigt sont connectés à l'aide de morceaux courts de filament 3 mm (pourquoi concevoir une broche de 3 mm lorsque vous avez des tonnes en stock: D)
Vous remarquerez que les doigts sont purement esthétiques La main est entièrement fonctionnelle sans eux.
- Dynéma 50 cm (fil de cerf-volant)
- Cordon élastique rond de 50 cm de 1,5 à 2 mm
- 50 cm Velcro de 25 mm double face
- Filament 20cm en ...3 mm (ceci est utilisé pour connecter les doigts et les liens de tendeur)
Imprimer:
- 1x yu-lia proto04_finger1and2.stl
- 1x yu-lia proto04_finger3.stl
- 3x yu-lia proto04_fingertip.stl
- 1x yu-lia proto04_gauntlet.stl
- 1x yu-lia proto04_link top 1.stl
- 1x * yu-lia proto04_link top 2.stl
- 1x * yu-lia proto04_link top 3.stl
- 1x * yu-lia proto04_tensionner.stl
- 1x yu-lia proto04_thumb Pin.stl
- 1x yu-lia proto04_thumb.stl
* J'ai conçu 3 versions du 1er lien externe dans le tendeur pour permettre un effet de levier plus important du cordon de tension si nécessaire
Designer
martinvanwezel@mac.comDescription du modèle 3D
Dans le cadre du projet E-Nable, j'ai été chargé de concevoir une main personnalisée pour une fille dans le besoin qui ne bénéficierait pas des ...appareils E-Nable standard. J'ai conçu le modèle à partir de zéro dans Fusion360. Il s'agit du 4e et dernier prototype qui est actuellement testé par le nom de mains Yu-LiaDans le cadre du projet E-Nable, j'ai été chargé de concevoir une main personnalisée pour une fille dans le besoin qui ne bénéficierait pas des appareils E-Nable standard.
J'ai conçu le modèle à partir de zéro dans Fusion360. Il s'agit du 4e et dernier prototype qui est actuellement testé par le nom de mains Yu-Lia
La conception est basée sur le mouvement "Pinch" qui est crucial pour une bonne fonction à main. Yu-Lia avait toujours un doigt fonctionnel (bien que déformé) que j'ai intégré dans la fonction de conception pour agir comme l'index.
Dans la conception, j'ai utilisé un scan 3D de sa main et modélisé la main autour de lui. Les mécanismes sont similaires au Raptor, mais s'appuient fortement sur le mouvement du doigt restant de Yu-Lia qui tire essentiellement le pouce imprimé en 3D.
La conception est livrée avec 3 liaisons de tendeur alternatives pour fournir différents niveaux de levier dans le fil de tension.
Les liens du tendeur et les pointes du doigt sont connectés à l'aide de morceaux courts de filament 3 mm (pourquoi concevoir une broche de 3 mm lorsque vous avez des tonnes en stock: D)
Vous remarquerez que les doigts sont purement esthétiques La main est entièrement fonctionnelle sans eux.
Paramètres d'impression du modèle 3D
Acheter:- Dynéma 50 cm (fil de cerf-volant)
- Cordon élastique rond de 50 cm de 1,5 à 2 mm
- 50 cm Velcro de 25 mm double face
- Filament 20cm en ...3 mm (ceci est utilisé pour connecter les doigts et les liens de tendeur)
Imprimer:
- 1x yu-lia proto04_finger1and2.stl
- 1x yu-lia proto04_finger3.stl
- 3x yu-lia proto04_fingertip.stl
- 1x yu-lia proto04_gauntlet.stl
- 1x yu-lia proto04_link top 1.stl
- 1x * yu-lia proto04_link top 2.stl
- 1x * yu-lia proto04_link top 3.stl
- 1x * yu-lia proto04_tensionner.stl
- 1x yu-lia proto04_thumb Pin.stl
- 1x yu-lia proto04_thumb.stl
* J'ai conçu 3 versions du 1er lien externe dans le tendeur pour permettre un effet de levier plus important du cordon de tension si nécessaire