La main du raptor par e-nable 3d pour imprimer







5018 Vues 2 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
Les objectifs de la conception de la main Raptor étaient les suivants:
* Pour simplifier la fabrication et l'assemblage et la réparation pour les fabricants et les destinataires
* Pour fournir une plate-forme et une conception de référence pour les innovations futures, incrémentiels et radicaux
* Pour identifier un ensemble de fonctionnalités de base et des dimensions standardisées incorporées dans des modèles 3D accessibles avec des termes de licence progressive qui assureront une disponibilité généralisée et un développement futur.
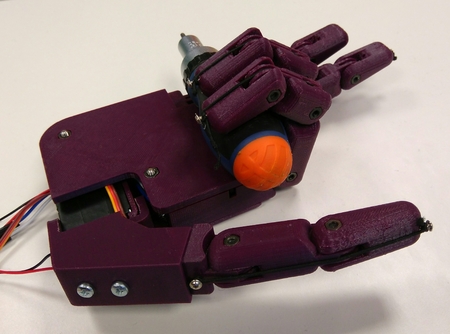
Les conceptions «Go to» de E-Nable comprenaient la bête Cyborg, la main Talon, la main Ody et la bête Talon. À ces classiques, la main Raptor par e-nable ajoute les fonctionnalités suivantes:
* Impression plus facile et plus rapide (aucun support requis)
* Assemblage plus facile et plus rapide (pas de vis de Chicago requises, installation de cordon simplifiée)
* Un système de tension amélioré (conception modulaire, permettant un développement futur plus facile)
* Documentation améliorée (à venir bientôt)
Toutes les pièces nécessaires à l'assemblage peuvent être trouvées facilement dans la plupart des domaines, mais si vous préférez tout obtenir en un seul endroit, l'univers 3D propose des kits avec tous les documents d'assemblage nécessaires pour produire une main Raptor: http://shop3duniverse.com / Collections / 3D-Kits / Products / Raptor-Hand-by-e-E-Nable-Assembly-materials-kit
Instructions d'impression:
* Échec de toutes les pièces au besoin (la main Raptor est conçue pour fonctionner à des échelles de 100% à 170%)
* À 100%, l'intérieur de la zone de la paume mesure 55 mm
* Mesurez à travers la partie la plus large de la paume, puis ajoutez 5 mm pour le rembourrage, puis divisez par 55 pour obtenir le facteur de mise à l'échelle (par exemple, si la paume mesure 65 mm de large, alors 65 + 5 = 70 et 70/55 = 1,27 - donc votre multiplicateur de mise à l'échelle serait de 1,27 ou 127%)
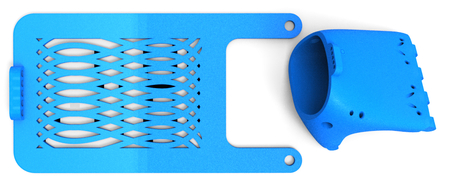
* Imprimer sans supports (Palm et Gauntlet ont des supports intégrés dans le modèle)
* PLA est recommandé
* Les paramètres suggérés sont de 0,2 mm de hauteur de couche, 35% de remplissage, 2 contours
* Reportez-vous aux noms de fichiers pour les descriptions des pièces. Le numéro suivant le "x" à la fin de chaque nom de fichier indique le nombre de copies de ce fichier STL à imprimer pour un assemblage à main complet.
* Après l'impression, retirez les pièces de support intégrées de la paume, du gant et du capuchon en queue d'aronde.
Le manuel des instructions de l'assemblage du PDF est gracieuseté de Mike Agronine de Direct Dimensions.
Pour plus d'informations sur le lieu de connexion avec les personnes qui peuvent aider quelqu'un dans le besoin avec le dimensionnement, l'impression et / ou l'assemblage d'une main mécanique, veuillez rejoindre la communauté Google+ e-nable intitulée, e-nable:
https://plus.google.com/communities/102497715636887179986
Pour plus d'informations et d'histoires: http: //enablingthefuture.orghttps: //www.facebook.com/enable organisation
* (4 pieds) Velcro, double face (2 ”de large)
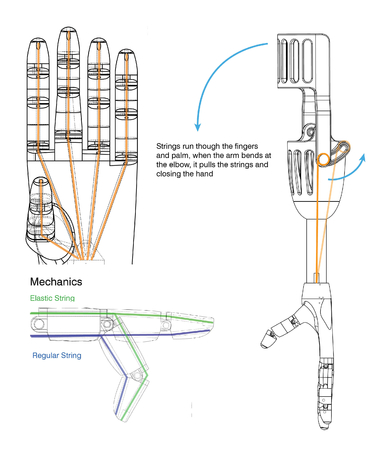
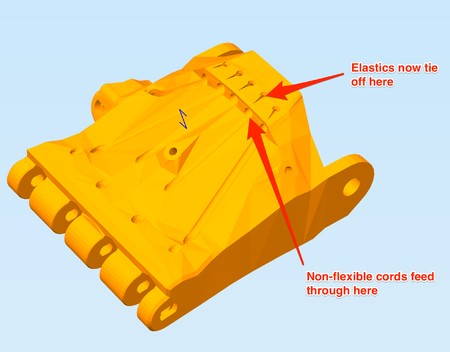
* (8 pieds) Cordon de levage en ny...lon non flexible ou ligne de pêche tressée ("ligne de spectres")
* (5 pieds) Cordon élastique flexible
* (5) Vis de tension
* (3) Vis de fixation Velcro Palm avec écrous d'arrêt
* (12 pouces) rembourrage de mousse ferme (5 ¾ ”de large)
* (5) Lee Tippi Micro Gel Pringertip Grips (comme indiqué sur la photo, facultatif)
Designer
e-NABLEDescription du modèle 3D
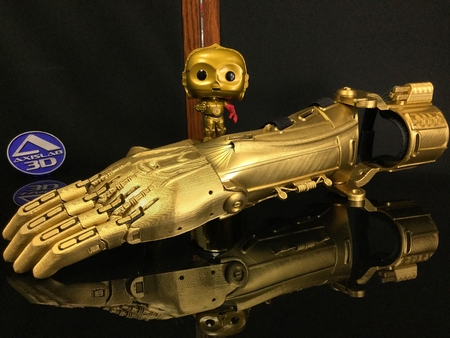
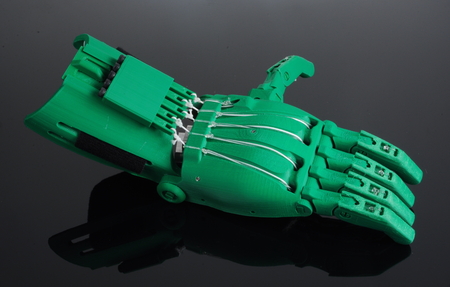
Nous sommes très heureux de présenter la main Raptor par E-Nable, conçue en collaboration par certains des meilleurs designers d'E-Nable! La main d...u Raptor est destinée à rassembler les idées les meilleures et les plus testées d'une année d'innovation sur la foule.Les objectifs de la conception de la main Raptor étaient les suivants:
* Pour simplifier la fabrication et l'assemblage et la réparation pour les fabricants et les destinataires
* Pour fournir une plate-forme et une conception de référence pour les innovations futures, incrémentiels et radicaux
* Pour identifier un ensemble de fonctionnalités de base et des dimensions standardisées incorporées dans des modèles 3D accessibles avec des termes de licence progressive qui assureront une disponibilité généralisée et un développement futur.
Les conceptions «Go to» de E-Nable comprenaient la bête Cyborg, la main Talon, la main Ody et la bête Talon. À ces classiques, la main Raptor par e-nable ajoute les fonctionnalités suivantes:
* Impression plus facile et plus rapide (aucun support requis)
* Assemblage plus facile et plus rapide (pas de vis de Chicago requises, installation de cordon simplifiée)
* Un système de tension amélioré (conception modulaire, permettant un développement futur plus facile)
* Documentation améliorée (à venir bientôt)
Toutes les pièces nécessaires à l'assemblage peuvent être trouvées facilement dans la plupart des domaines, mais si vous préférez tout obtenir en un seul endroit, l'univers 3D propose des kits avec tous les documents d'assemblage nécessaires pour produire une main Raptor: http://shop3duniverse.com / Collections / 3D-Kits / Products / Raptor-Hand-by-e-E-Nable-Assembly-materials-kit
Instructions d'impression:
* Échec de toutes les pièces au besoin (la main Raptor est conçue pour fonctionner à des échelles de 100% à 170%)
* À 100%, l'intérieur de la zone de la paume mesure 55 mm
* Mesurez à travers la partie la plus large de la paume, puis ajoutez 5 mm pour le rembourrage, puis divisez par 55 pour obtenir le facteur de mise à l'échelle (par exemple, si la paume mesure 65 mm de large, alors 65 + 5 = 70 et 70/55 = 1,27 - donc votre multiplicateur de mise à l'échelle serait de 1,27 ou 127%)
* Imprimer sans supports (Palm et Gauntlet ont des supports intégrés dans le modèle)
* PLA est recommandé
* Les paramètres suggérés sont de 0,2 mm de hauteur de couche, 35% de remplissage, 2 contours
* Reportez-vous aux noms de fichiers pour les descriptions des pièces. Le numéro suivant le "x" à la fin de chaque nom de fichier indique le nombre de copies de ce fichier STL à imprimer pour un assemblage à main complet.
* Après l'impression, retirez les pièces de support intégrées de la paume, du gant et du capuchon en queue d'aronde.
Le manuel des instructions de l'assemblage du PDF est gracieuseté de Mike Agronine de Direct Dimensions.
Pour plus d'informations sur le lieu de connexion avec les personnes qui peuvent aider quelqu'un dans le besoin avec le dimensionnement, l'impression et / ou l'assemblage d'une main mécanique, veuillez rejoindre la communauté Google+ e-nable intitulée, e-nable:
https://plus.google.com/communities/102497715636887179986
Pour plus d'informations et d'histoires: http: //enablingthefuture.orghttps: //www.facebook.com/enable organisation
Paramètres d'impression du modèle 3D
L'assemblage d'une main Raptor nécessite les matériaux suivants:* (4 pieds) Velcro, double face (2 ”de large)
* (8 pieds) Cordon de levage en ny...lon non flexible ou ligne de pêche tressée ("ligne de spectres")
* (5 pieds) Cordon élastique flexible
* (5) Vis de tension
* (3) Vis de fixation Velcro Palm avec écrous d'arrêt
* (12 pouces) rembourrage de mousse ferme (5 ¾ ”de large)
* (5) Lee Tippi Micro Gel Pringertip Grips (comme indiqué sur la photo, facultatif)