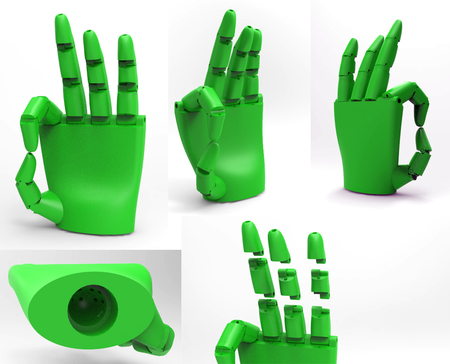
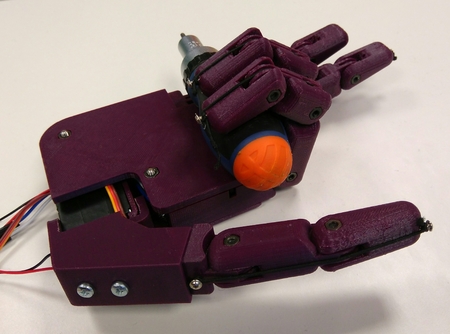
Raptor rechargé par e-nable 3d pour imprimer

















9165 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
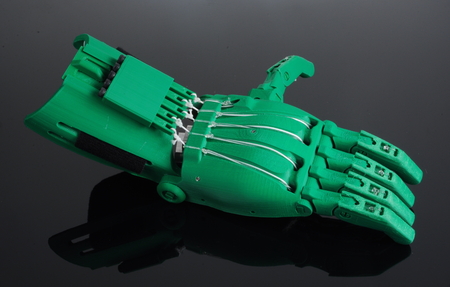
Le Raptor Reloaded est une version mise à jour de l'original qui intègre les commentaires de la communauté E-Na...ble et dispose de fichiers source de conception CAO disponibles dans les formats STEP, IGES, IPT et F3D.
Les mises à jour de la version 12-17-14 incluent:
- Capacité imprimée améliorée en raison de supports modélisés personnalisés
- Cyborg Beast Compatible Dimensive
- Géométrie en queue d'aronde améliorée
- Clip de rétention du tendeur
- Easise d'utiliser des épingles de tendeur
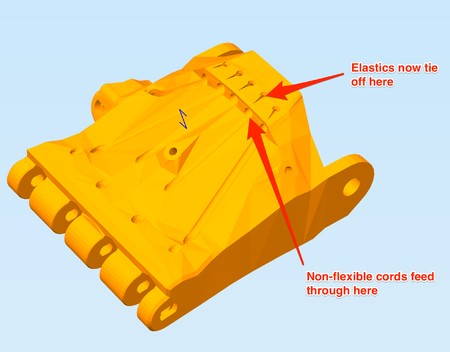
- des élastiques de profil-bas avec deux options d'attachement
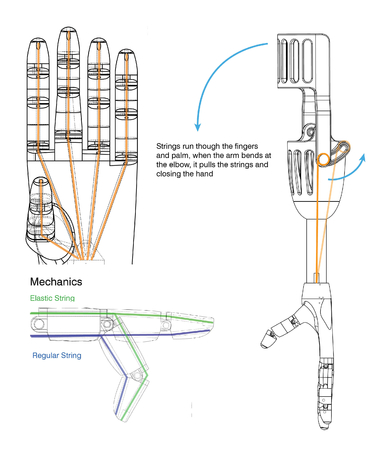
- Un plus grand accès aux canaux de routage élastiques et flexsor
- Informations sur le version de la Palm et Gaunt
- Sinmer, plus de doigts anthropomorhpic
- Bloc à la jointure
- Assemblage intuitif (nouveaux proximaux unidirectionnels)
- Documentation et conception modulaire
- Fichiers de source au format Native Fusion 360, également Step et IgE
- Options de montage en velcro additionnelles ainsi que les options de boucle velcro traditionnelle et de cuir
- Recsages de tête à pointe instantanée orientés vers l'amélioration pour améliorer l'imprimabilité
- Les épingles de la jointure sont désormais amovibles, ce qui rend la main facile à réparer et à mettre à niveau
- Bars de cravate obtenus sur les pointes des doigts
Fichiers source de CAO natif disponibles ici:
Assemblage complet
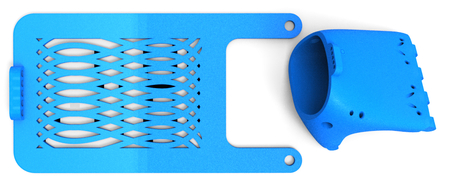
Palme gauche
Palmier droit
Gant
Phalange proximale
Bout du doigt
Pin de pointe du doigt
Instructions d'assemblage détaillées disponibles sur bit.ly/raptorreloaded
Échelle toutes les pièces au besoin (la main Raptor est conçue pour fonctionner à des échelles de 100% à 170%)
À 10...0%, l'intérieur de la zone de la palme mesure 55 mm
Mesurez à travers la partie la plus large de la paume, puis ajoutez 5 mm pour le rembourrage, puis divisez par 55 pour obtenir le facteur de mise à l'échelle (par exemple, si la paume mesure 65 mm de large, alors 65 + 5 = 70 et 70/55 = 1,27 - donc Votre multiplicateur de mise à l'échelle serait de 1,27 ou 127%)
Imprimer sans supports (Palm et Gauntlet ont des supports intégrés dans le modèle)
L'APL est recommandé
Les paramètres suggérés sont de 0,2 mm de hauteur de couche, 35% de remplissage, 2 contours
Reportez-vous aux noms de fichiers pour les descriptions des pièces. Le numéro à crochets à la fin de chaque nom de fichier indique le nombre de copies de ce fichier STL à imprimer pour un assemblage à main complet.
Un tutoriel vidéo pour le processus d'assemblage peut être trouvé ici: http://youtu.be/5hvwc3rnwxk
L'assemblage d'une main Raptor nécessite les matériaux suivants:
(4 pieds) Velcro, double face (2 ”de large)
(8 pieds) Cordon en nylon non élastique, 0,9 mm
(5 pieds) Cordon élastique flexible
(5) Vis du tendeur
(3) Vis de fixation du velcro de palmier avec écrous d'arrêt
(12 pouces) un rembourrage de mousse ferme (5 ¾ ”de large)
(5) Lee Tippi Micro Gel Fingertip Grips (facultatif)
Toutes les pièces nécessaires à l'assemblage peuvent être trouvées facilement dans la plupart des domaines, mais si vous préférez tout obtenir en un seul endroit, l'univers 3D propose des kits avec tous les documents d'assemblage nécessaires pour produire une main Raptor: http://shop3duniverse.com / Collections / 3D-Kits / Products / Raptor-Hand-by-e-E-Nable-Assembly-materials-kit
Designer
https://www.youmagine.com/e-nable--2/designsDescription du modèle 3D
Le dernier de la série Raptor HandLe Raptor Reloaded est une version mise à jour de l'original qui intègre les commentaires de la communauté E-Na...ble et dispose de fichiers source de conception CAO disponibles dans les formats STEP, IGES, IPT et F3D.
Les mises à jour de la version 12-17-14 incluent:
- Capacité imprimée améliorée en raison de supports modélisés personnalisés
- Cyborg Beast Compatible Dimensive
- Géométrie en queue d'aronde améliorée
- Clip de rétention du tendeur
- Easise d'utiliser des épingles de tendeur
- des élastiques de profil-bas avec deux options d'attachement
- Un plus grand accès aux canaux de routage élastiques et flexsor
- Informations sur le version de la Palm et Gaunt
- Sinmer, plus de doigts anthropomorhpic
- Bloc à la jointure
- Assemblage intuitif (nouveaux proximaux unidirectionnels)
- Documentation et conception modulaire
- Fichiers de source au format Native Fusion 360, également Step et IgE
- Options de montage en velcro additionnelles ainsi que les options de boucle velcro traditionnelle et de cuir
- Recsages de tête à pointe instantanée orientés vers l'amélioration pour améliorer l'imprimabilité
- Les épingles de la jointure sont désormais amovibles, ce qui rend la main facile à réparer et à mettre à niveau
- Bars de cravate obtenus sur les pointes des doigts
Fichiers source de CAO natif disponibles ici:
Assemblage complet
Palme gauche
Palmier droit
Gant
Phalange proximale
Bout du doigt
Pin de pointe du doigt
Instructions d'assemblage détaillées disponibles sur bit.ly/raptorreloaded
Paramètres d'impression du modèle 3D
Instructions d'impression:Échelle toutes les pièces au besoin (la main Raptor est conçue pour fonctionner à des échelles de 100% à 170%)
À 10...0%, l'intérieur de la zone de la palme mesure 55 mm
Mesurez à travers la partie la plus large de la paume, puis ajoutez 5 mm pour le rembourrage, puis divisez par 55 pour obtenir le facteur de mise à l'échelle (par exemple, si la paume mesure 65 mm de large, alors 65 + 5 = 70 et 70/55 = 1,27 - donc Votre multiplicateur de mise à l'échelle serait de 1,27 ou 127%)
Imprimer sans supports (Palm et Gauntlet ont des supports intégrés dans le modèle)
L'APL est recommandé
Les paramètres suggérés sont de 0,2 mm de hauteur de couche, 35% de remplissage, 2 contours
Reportez-vous aux noms de fichiers pour les descriptions des pièces. Le numéro à crochets à la fin de chaque nom de fichier indique le nombre de copies de ce fichier STL à imprimer pour un assemblage à main complet.
Un tutoriel vidéo pour le processus d'assemblage peut être trouvé ici: http://youtu.be/5hvwc3rnwxk
L'assemblage d'une main Raptor nécessite les matériaux suivants:
(4 pieds) Velcro, double face (2 ”de large)
(8 pieds) Cordon en nylon non élastique, 0,9 mm
(5 pieds) Cordon élastique flexible
(5) Vis du tendeur
(3) Vis de fixation du velcro de palmier avec écrous d'arrêt
(12 pouces) un rembourrage de mousse ferme (5 ¾ ”de large)
(5) Lee Tippi Micro Gel Fingertip Grips (facultatif)
Toutes les pièces nécessaires à l'assemblage peuvent être trouvées facilement dans la plupart des domaines, mais si vous préférez tout obtenir en un seul endroit, l'univers 3D propose des kits avec tous les documents d'assemblage nécessaires pour produire une main Raptor: http://shop3duniverse.com / Collections / 3D-Kits / Products / Raptor-Hand-by-e-E-Nable-Assembly-materials-kit