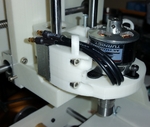
大部分 3d 可打印 cnc 3D打印




















7699 视图 1 喜欢 1 下载 下载
文档正在进行中...
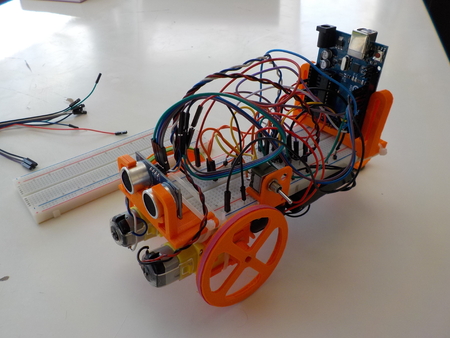
* 如何组装
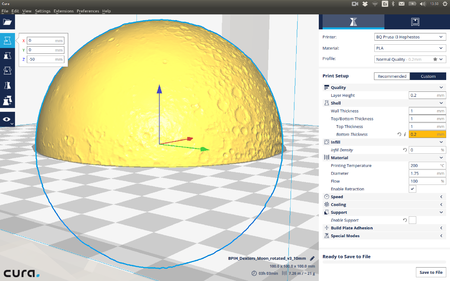
* 如何打印
- 许多对象未处于打印方�...�
- 所有对象都已包含所有需要的打印支持
* 什么有效
* 什么无效
- V4 GRBL 板在所有轴上翻转了步骤和方向,必须更改 grbl 引脚输出并重新编译。添加了我使用的 grbl hex 文件。
-- 微步进在 V4 GRBL 板上也不起作用(接地)
- ESC 试图为 RPI 供电时过热
* 如何配置 Arduino、GRBL、RPI
- 测试无刷电机
-- http://abyz.co.uk/rpi/pigpio/download.html
-- 下载 PWM 程序
-- #wget abyz.co.uk/rpi/pigpio/pigpio.zip
-- unzip pigpio.zip
-- #cd PIGPIO
-- #make
-- #sudo make install
-- 将 ESC 控制连接到 BCM 引脚 17(物理引脚 11)
-- 启动 pigpio 守护进程
-- #sudo pigpiod
-- 在引脚 17 上运行 PWM 信号
-- #pigs s 17 500 - 初始化
-- #pigs s 17 1065 - 缓慢移动
-- 停止 pigpio 守护进程
-- #sudo killall pigpiod
- 当前 GRBL 值
-- 使用四分之一步!!移除跳线并将 VDD 连接到 MS2!!
-- 设置 Vref = 250mV(由于振动,全浸泡时使用 100mV)
-- 仍需设置软限制
-- $0=5(步进脉冲,微秒)
-- $1=1(步进空闲延迟,毫秒)
-- $2=0(步进端口反转掩码:00000000)
-- $3=0(方向端口反转掩码:00000000)
-- $4=0(步进启用反转,布尔值)
-- $5=0(限制引脚反转,布尔值)
-- $6=0(探测引脚反转,布尔值)
-- $10=3(状态报告mask:00000011)
-- $11=0.010 (连接偏差,mm)
-- $12=0.002 (弧度公差,mm)
-- $13=0 (报告英寸,bool)
-- $20=0 (软限制,bool)
-- $21=1 (硬限制,bool)
-- $22=1 (归位周期,bool)
-- $23=3 (归位方向反转 mask:00000011)
-- $24=50.000 (归位进给,mm/min)
-- $25=800.000(归位寻道,毫米/分钟)
-- $26=250(归位去抖动,毫秒)
-- $27=1.000(归位拉离,毫米)
-- $100=200.000(x,步长/毫米)
-- $101=200.000(y,步长/毫米)
-- $102=200.000(z,步长/毫米)
-- $110=800.000(x 最大速率,毫米/分钟)
-- $111=800.000(y 最大速率,毫米/分钟)
-- $112=800.000 (z 最大速率,mm/min)
-- $120=10.000 (x 加速度,mm/sec^2)
-- $121=10.000 (y 加速度,mm/sec^2)
-- $122=10.000 (z 加速度,mm/sec^2)
-- $130=200.000 (x 最大行程,mm)
-- $131=200.000 (y 最大行程,mm)
-- $132=200.000 (z 最大行程,mm)
-- 测试 OLED
-- 启用i2c
-- sudo apt-get install git
-- git clone https://github.com/adafruit/Adafruit_Python_SSD1306.git
-- cd Adafruit_Python_SSD1306
-- sudo python setup.py install
-- 运行 Adafruit 示例
-- 可能的依赖项
--- sudo apt-get install build-essential python-dev python-pip python-imaging python-smbus
* 软件/工作流程
- Fritzing,创建电路并导出到 SVG
-- http://fritzing.org/home
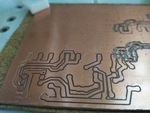
- Inkscape,获取PCB 走线轮廓(查看示例文件)
-- https://inkscape.org/en
-- 加载从 Fritzing 导出的 SVG 文件
-- 将视图更改为轮廓(视图 → 显示模式 → 轮廓)
-- 取消对象分组(对象 → 取消分组)
-- 创建要勾勒轮廓的所有对象的副本
-- 新副本合并所有路径/对象(路径 → 合并)
-- 转到填充设置(ctrl + shift + F)
--- 将填充更改为无 (X)
--- 将描边更改为平面颜色
--- 注意:可以通过使用“描边样式”使轮廓变大
-- 创建轮廓(路径 → 描边到路径)
-- 保存新的 SVG
- BlenderCAM,从 inscape SVG 文件创建 G 代码
-- http://blendercam.blogspot.com/p/download-and-installation.html
-- 必须在这里进行一些后处理以删除您不想要/不需要的内容
-- 稍后我会尝试并在此处获取更多信息
- Universal G 代码发送器,将 G 代码从 RPI 发送到 arduino
-- https://github.com/winder/Universal-G-Code-Sender
-- 或 bCNC
--- https://github.com/vlachoudis/bCNC/wiki
* GPIO 分配 (BCM)
power =21 #关机按钮
center=20
up =26
down =13
left =16
righ...t =19
rpmPin = 6 #输入引脚以感应 RPM
escPin = 12 #输出到 ESC
#读取 PWM 值 = 15 (/dev/ttyAMA0)
* 在将脚本添加到启动之前对其进行测试
* 将脚本解压缩到您的文档文件夹中
/home/pi/Documents/mlmCnc/main.py
* 将以下内容添加到 rc.local (sudo vi /etc/rc.local)
sudo pigpiod
sudo /home/pi/Documents/mlmCnc/main.py &
*确保串行端口 TTYAMA0 可用
*确保 pigpio 库安装
设计师
Saul Mendoza3D 模型描述
只是另一个主要可 3D 打印的 CNC/雕刻机文档正在进行中...
* 如何组装
* 如何打印
- 许多对象未处于打印方�...�
- 所有对象都已包含所有需要的打印支持
* 什么有效
* 什么无效
- V4 GRBL 板在所有轴上翻转了步骤和方向,必须更改 grbl 引脚输出并重新编译。添加了我使用的 grbl hex 文件。
-- 微步进在 V4 GRBL 板上也不起作用(接地)
- ESC 试图为 RPI 供电时过热
* 如何配置 Arduino、GRBL、RPI
- 测试无刷电机
-- http://abyz.co.uk/rpi/pigpio/download.html
-- 下载 PWM 程序
-- #wget abyz.co.uk/rpi/pigpio/pigpio.zip
-- unzip pigpio.zip
-- #cd PIGPIO
-- #make
-- #sudo make install
-- 将 ESC 控制连接到 BCM 引脚 17(物理引脚 11)
-- 启动 pigpio 守护进程
-- #sudo pigpiod
-- 在引脚 17 上运行 PWM 信号
-- #pigs s 17 500 - 初始化
-- #pigs s 17 1065 - 缓慢移动
-- 停止 pigpio 守护进程
-- #sudo killall pigpiod
- 当前 GRBL 值
-- 使用四分之一步!!移除跳线并将 VDD 连接到 MS2!!
-- 设置 Vref = 250mV(由于振动,全浸泡时使用 100mV)
-- 仍需设置软限制
-- $0=5(步进脉冲,微秒)
-- $1=1(步进空闲延迟,毫秒)
-- $2=0(步进端口反转掩码:00000000)
-- $3=0(方向端口反转掩码:00000000)
-- $4=0(步进启用反转,布尔值)
-- $5=0(限制引脚反转,布尔值)
-- $6=0(探测引脚反转,布尔值)
-- $10=3(状态报告mask:00000011)
-- $11=0.010 (连接偏差,mm)
-- $12=0.002 (弧度公差,mm)
-- $13=0 (报告英寸,bool)
-- $20=0 (软限制,bool)
-- $21=1 (硬限制,bool)
-- $22=1 (归位周期,bool)
-- $23=3 (归位方向反转 mask:00000011)
-- $24=50.000 (归位进给,mm/min)
-- $25=800.000(归位寻道,毫米/分钟)
-- $26=250(归位去抖动,毫秒)
-- $27=1.000(归位拉离,毫米)
-- $100=200.000(x,步长/毫米)
-- $101=200.000(y,步长/毫米)
-- $102=200.000(z,步长/毫米)
-- $110=800.000(x 最大速率,毫米/分钟)
-- $111=800.000(y 最大速率,毫米/分钟)
-- $112=800.000 (z 最大速率,mm/min)
-- $120=10.000 (x 加速度,mm/sec^2)
-- $121=10.000 (y 加速度,mm/sec^2)
-- $122=10.000 (z 加速度,mm/sec^2)
-- $130=200.000 (x 最大行程,mm)
-- $131=200.000 (y 最大行程,mm)
-- $132=200.000 (z 最大行程,mm)
-- 测试 OLED
-- 启用i2c
-- sudo apt-get install git
-- git clone https://github.com/adafruit/Adafruit_Python_SSD1306.git
-- cd Adafruit_Python_SSD1306
-- sudo python setup.py install
-- 运行 Adafruit 示例
-- 可能的依赖项
--- sudo apt-get install build-essential python-dev python-pip python-imaging python-smbus
* 软件/工作流程
- Fritzing,创建电路并导出到 SVG
-- http://fritzing.org/home
- Inkscape,获取PCB 走线轮廓(查看示例文件)
-- https://inkscape.org/en
-- 加载从 Fritzing 导出的 SVG 文件
-- 将视图更改为轮廓(视图 → 显示模式 → 轮廓)
-- 取消对象分组(对象 → 取消分组)
-- 创建要勾勒轮廓的所有对象的副本
-- 新副本合并所有路径/对象(路径 → 合并)
-- 转到填充设置(ctrl + shift + F)
--- 将填充更改为无 (X)
--- 将描边更改为平面颜色
--- 注意:可以通过使用“描边样式”使轮廓变大
-- 创建轮廓(路径 → 描边到路径)
-- 保存新的 SVG
- BlenderCAM,从 inscape SVG 文件创建 G 代码
-- http://blendercam.blogspot.com/p/download-and-installation.html
-- 必须在这里进行一些后处理以删除您不想要/不需要的内容
-- 稍后我会尝试并在此处获取更多信息
- Universal G 代码发送器,将 G 代码从 RPI 发送到 arduino
-- https://github.com/winder/Universal-G-Code-Sender
-- 或 bCNC
--- https://github.com/vlachoudis/bCNC/wiki
3D模型打印参数
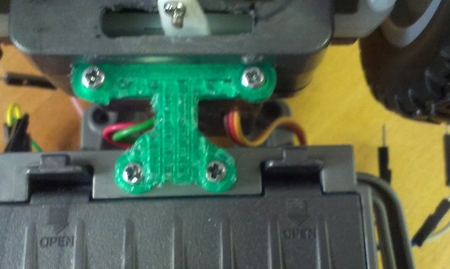
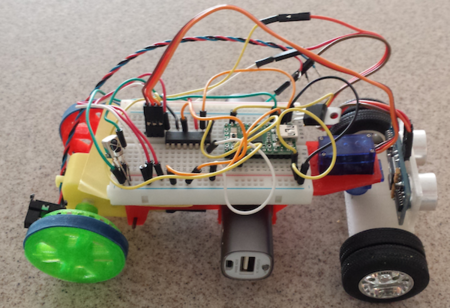
* 使用 Attiny85 和 3mm IR LED 发射器和接收器测试电路* GPIO 分配 (BCM)
power =21 #关机按钮
center=20
up =26
down =13
left =16
righ...t =19
rpmPin = 6 #输入引脚以感应 RPM
escPin = 12 #输出到 ESC
#读取 PWM 值 = 15 (/dev/ttyAMA0)
* 在将脚本添加到启动之前对其进行测试
* 将脚本解压缩到您的文档文件夹中
/home/pi/Documents/mlmCnc/main.py
* 将以下内容添加到 rc.local (sudo vi /etc/rc.local)
sudo pigpiod
sudo /home/pi/Documents/mlmCnc/main.py &
*确保串行端口 TTYAMA0 可用
*确保 pigpio 库安装