Châssis de robot à faible coût (bêta) 3d pour imprimer

6930 Vues 2 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
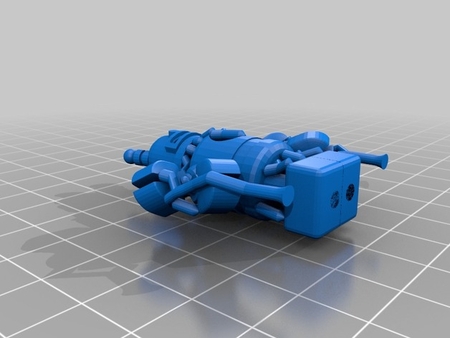
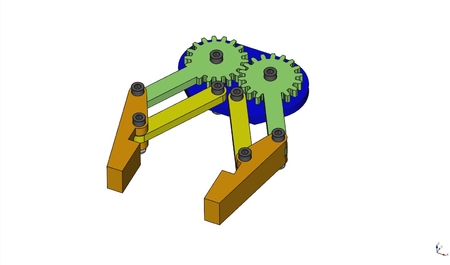
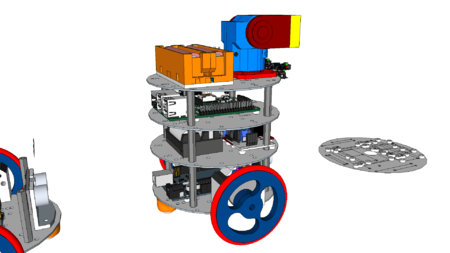
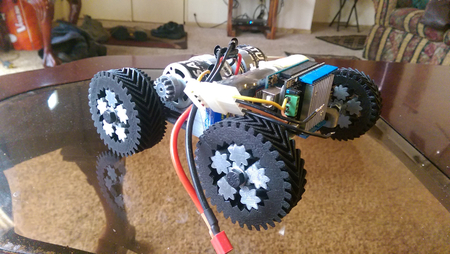
Cette conception cherche à minimiser le nombre de pièces d'un châssis robot imprimé en 3D. Tout le matériel du châssis coûte moins de 10 $. Les batteries de moteurs et le contrôleur de moteur peuvent remplacer n'importe quel choix. J'espère convertir la conception finale en OpenSCAD afin que la conception soit paramétrique. Les engrenages sur les roues arrière et le moteur ont été fabriqués sur une version personnalisée du générateur de vitesses de Blender. Pour ceux qui générent leurs propres ratios d'équipement, voici les statistiques de l'équipement autour des roues d'entraînement arrière:
Nombre de dents 50
pas de 4 mm
autorisation .5 mm
largeur 2,5 mm
base de 4,2 mm
PA 20D
Je ne fournis pas le script Blender en ce moment car c'est un peu un hack et à l'avenir, j'espère convertir la conception en OpenSCAD de toute façon.
4x noix M6
Rondelles 8x
6 40 mm M6 (support de moteur)...
Designer
AFJayDescription du modèle 3D
J'ai conçu ce châssis dans Blender comme une preuve de concept. Cependant, ce n'est pas encore tout à fait fini. Les roues sont basées sur le roul...ement d'équipement d'Emmett.Cette conception cherche à minimiser le nombre de pièces d'un châssis robot imprimé en 3D. Tout le matériel du châssis coûte moins de 10 $. Les batteries de moteurs et le contrôleur de moteur peuvent remplacer n'importe quel choix. J'espère convertir la conception finale en OpenSCAD afin que la conception soit paramétrique. Les engrenages sur les roues arrière et le moteur ont été fabriqués sur une version personnalisée du générateur de vitesses de Blender. Pour ceux qui générent leurs propres ratios d'équipement, voici les statistiques de l'équipement autour des roues d'entraînement arrière:
Nombre de dents 50
pas de 4 mm
autorisation .5 mm
largeur 2,5 mm
base de 4,2 mm
PA 20D
Je ne fournis pas le script Blender en ce moment car c'est un peu un hack et à l'avenir, j'espère convertir la conception en OpenSCAD de toute façon.
Paramètres d'impression du modèle 3D
Boulons M6 4x 60 mm (essieux)4x noix M6
Rondelles 8x
6 40 mm M6 (support de moteur)...