Colibris. 3d pour imprimer





4852 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
https://youtu.be/2vsfsrn2saa
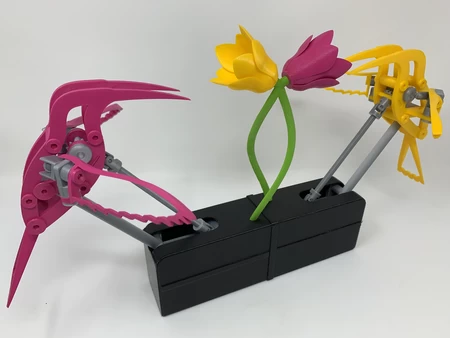
Ma femme aime les colibris, c'est pourquoi j'ai conçu mon premier Hummingbird Automate "Hummingbird" (https://...www.youmagine.com/designens/hummingbird). Alors, quoi de mieux pour être meilleur que d'avoir une automate à colibri? Pourquoi cette double automate à colibris, "colibris", bien sûr!
Assemblé avec plus d'une centaine de pièces imprimées en 3D et trois pièces achetées, "Hummingbirds" est certainement un défi à imprimer et à assembler.
Et comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide de Cura 4.2, et imprimé dans PLA sur un ultimaker 2+ étendu et un ultimaker 3 étendu.
J'ai acheté les parties suivantes:
○ Motor d'engrenage 150 tr / min (Recherchez "Uxcell DC 3V 150rpm ...Micro Speed Reduction Motor Box Boîte de vitesses avec 2 bornes pour RC Car Robot Model DIY Engine jouet").
○ Une alimentation 3VDC.
○ Un connecteur coaxial qui s'adapte au connecteur d'alimentation (facultatif).
Le fichier inclus "Liste des pièces de colibris" contient les noms de pièce, les quantités, les hauteurs de la couche et les paramètres de remplissage des pièces imprimées 3D requises pour ce modèle.
"Hummingbirds" est un modèle d'impression et d'assemblage de haute précision. Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
"Hummingbirds" utilise également un assemblage fileté, j'ai donc utilisé un robinet et une matrice de 6 mm BY1 pour le nettoyage de filetage.
Assemblez les colibris.
https://www.youtube.com/watch?v=AWZWDXY4I3W
J'ai assemblé à droite (magenta dans l'image de couverture) le colibri comme suit:
○ Assemblé les six joints universels comme indiqué dans la vidéo incluse (cinq comme indiqué dans la vidéo, la sixième utilisant "Gear, Yoke, Drive (module 1.1, dents 20.stl").
○ Appuyez sur un "boulon, équipement, couronne.stl" en un "engrenage, couronne (module 1.5, dents 12) .stl".
○ Faire glisser l'ensemble du boulon et de la couronne en un "espaceur, plat.stl", puis fixé en place avec un ensemble de joug en s'assurant que l'ensemble tournait librement.
○ Appuyez sur un "engrenage, couronne (module 1,5, dents 12) .stl" sur un "essieu, roues.stl" Alignant soigneusement l'engrenage avec la spline d'essieu.
○ Positionné l'essieu et l'ensemble de l'équipement de la couronne en un seul "corps, à droite", avec l'équipement adjacent au corps.
○ Appuyez sur l'assemblage de joug dans le corps.
○ Appuyez sur "Body, Left.stl" sur l'assemblage.
○ Fiffée de deux "roues, rht.stl" sur les fils d'assemblage de l'essieu et de la couronne et a aligné les joints à billes.
○ Positionnée et fixée en place quatre "espaceurs, rond.stl" dans l'assemblage du corps en utilisant huit "boulon, 6 mm, 3,8 mm épaule.stl".
○ Placé un "" "pivot, épaule.stl" dans un "pivot, wing.stl" puis fixé en place avec un "boulon pivot wing.stl" s'assurer que l'ensemble tournait librement.
○ Réglage une "aile, à droite.stl" sur l'ensemble de l'épaule en utilisant un "boulon, 6 mm, 2,8 mm épaule.stl".
○ a cassé une extrémité de "Rielle reliant un trou de 6,3 mm.stl" sur la boule de l'ensemble de l'aile.
○ Positionné l'ensemble de l'aile sur l'épaule du côté droit du corps, puis fixé en place avec un "boulon, 6 mm, 4,4 mm épaule.stl".
○ a cassé l'extrémité restante de la bielle sur la balle sur la roue à droite, puis s'est assuré que l'ensemble tournait librement.
○ Répétez les étapes d'assemblage de l'aile pour l'aile gauche.
○ Fiffé un "essieu, lecteur.stl" dans l'extrémité libre de l'articulation universelle.
○ Fiffée d'un ensemble de joints universels sur l'extrémité libre de l'essieu d'entraînement.
○ Positionné un "tail.stl" entre les cadres et fixé en place avec deux "gras, 6 mm, 4,4 mm épaule.stl".
J'ai assemblé le colibri à gauche (jaune dans l'image de couverture) comme j'ai fait à droite à l'exception de l'inversion de l'orientation de l'essieu et de l'assemblage de la couronne de telle sorte que l'engrenage est adjacent au corps gauche (par ex. Un "bec à bec" d'image du miroir " ).
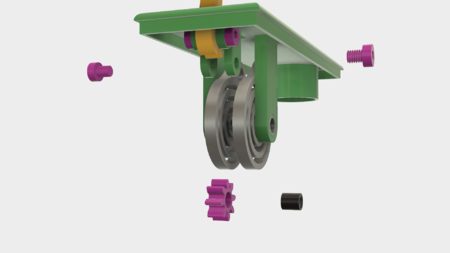
Assemblez la base.
J'ai assemblé la base comme suit:
○ Cergé le moteur au connecteur coaxial (facultatif) de sorte que l'arbre du moteur tourne dans le sens horaire lorsqu'il est vu à partir de l'extrémité de l'arbre du moteur du moteur.
○ Appuyez sur le moteur dans "Base.stl".
○ Réglage le câble coaxial à l'ensemble de base à l'aide de l'écrou inclus.
○ Appuyez sur "MOTEUR, MOTEUR (Module 1.1, dents 10) .Stl" sur l'arbre du moteur.
○ Positionné un "équipement, joug, entraînement (module 1.1, dents 20) .Stl" Assemblage (assemblé à l'étape précédente) dans l'assemblage de base et un coupleur en filetage ", 18mm.stl" dans les filetages d'engrenage.
○ Généraire fileté "Worm.stl" sur le coupleur.
○ Fiffée un "coupleur, 4,4 mm" dans l'extrémité libre de l'assemblage de joug à engouez.
○ Fillé le «coupleur» restant dans le pignon de ver.
○ Fiffelz un assemblage de joug sur le coupleur.
○ Filetage un coupleur, 4 mm dans l'extrémité libre de l'assemblage de joug.
○ Positionnée "Gear.stl" dans l'assemblage de base puis fixée en place avec un "boulon, 6 mm, 4,4 mm épaule.stl".
○ Réglage un "bras, Gear.stl" sur "ARM.stl" en utilisant un "boulon, 6 mm, 4,4 mm épaule.stl".
○ Réglage cet ensemble de bras dans l'extrémité gauche de l'ensemble de base à l'aide de deux "boulon, 6 mm, 4,4 mm épaule.stl" s'assurer que le bras pivotait librement.
○ Réglage le "bras, Gear.stl" restant "sur" bras, offset.stl "(sur la face extérieure du bras décalé) en utilisant un" boulon, 6 mm, 4,4 mm épaule.stl ".
○ Réglage cet ensemble de bras dans l'extrémité droite de l'ensemble de base à l'aide de deux "boulon, 6 mm, 4,4 mm épaule.stl" s'assurer que le bras pivotait librement.
○ Réglage les extrémités libres de chaque bras d'engrenage à l'engrenage à l'aide d'un "essieu, bras, équipement.stl".
○ a appliqué la puissance au moteur et a permis au bras gauche de se déplacer vers la limite la plus basse, puis a retiré la puissance.
○ Couper "COUVERTURE, gauche.stl" sur l'extrémité libre du bras gauche, la glisser en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
○ a appliqué la puissance au moteur et a permis au bras droit de se déplacer vers la limite la plus basse, puis a supprimé la puissance.
○ Couper "Couverture, à droite.stl" sur l'extrémité libre du bras droit, la glissa en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
○ Couper "COUVERTURE, gauche.stl" sur l'extrémité libre du bras gauche, la glisser en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes.
○ Positionné l'assemblage de l'oiseau gauche (jaune dans l'image de couverture) sur le bras gauche et fixé en place avec deux "boulon, 6 mm, 4,4 mm épaule.stl".
○ Filé le joug d'oiseau gauche sur le coupleur de base gauche.
○ Positionné l'assemblage d'oiseau droit (magenta dans l'image de couverture) sur le bras droit et fixé en place avec deux "boulon, 6 mm, 4,4 mm épaule.stl".
○ Filé le joug d'oiseau droit sur le coupleur de base droit.
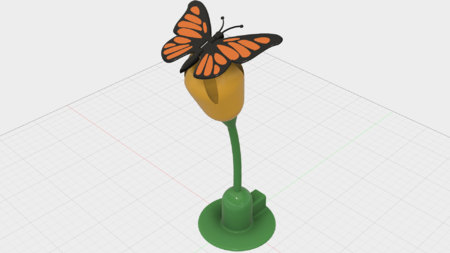
○ Appuyez sur les deux "fleur.stl" sur "tiges" de telle sorte que les pétales plus longs étaient alignés verticalement.
○ Appuyez sur l'assemblage de la fleur et de la tige dans la base.
Et c'est ainsi que j'ai imprimé et assemblé des "colibris".
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Colibris.https://youtu.be/2vsfsrn2saa
Ma femme aime les colibris, c'est pourquoi j'ai conçu mon premier Hummingbird Automate "Hummingbird" (https://...www.youmagine.com/designens/hummingbird). Alors, quoi de mieux pour être meilleur que d'avoir une automate à colibri? Pourquoi cette double automate à colibris, "colibris", bien sûr!
Assemblé avec plus d'une centaine de pièces imprimées en 3D et trois pièces achetées, "Hummingbirds" est certainement un défi à imprimer et à assembler.
Et comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide de Cura 4.2, et imprimé dans PLA sur un ultimaker 2+ étendu et un ultimaker 3 étendu.
Paramètres d'impression du modèle 3D
Achetez, imprimez et préparez les pièces.J'ai acheté les parties suivantes:
○ Motor d'engrenage 150 tr / min (Recherchez "Uxcell DC 3V 150rpm ...Micro Speed Reduction Motor Box Boîte de vitesses avec 2 bornes pour RC Car Robot Model DIY Engine jouet").
○ Une alimentation 3VDC.
○ Un connecteur coaxial qui s'adapte au connecteur d'alimentation (facultatif).
Le fichier inclus "Liste des pièces de colibris" contient les noms de pièce, les quantités, les hauteurs de la couche et les paramètres de remplissage des pièces imprimées 3D requises pour ce modèle.
"Hummingbirds" est un modèle d'impression et d'assemblage de haute précision. Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
"Hummingbirds" utilise également un assemblage fileté, j'ai donc utilisé un robinet et une matrice de 6 mm BY1 pour le nettoyage de filetage.
Assemblez les colibris.
https://www.youtube.com/watch?v=AWZWDXY4I3W
J'ai assemblé à droite (magenta dans l'image de couverture) le colibri comme suit:
○ Assemblé les six joints universels comme indiqué dans la vidéo incluse (cinq comme indiqué dans la vidéo, la sixième utilisant "Gear, Yoke, Drive (module 1.1, dents 20.stl").
○ Appuyez sur un "boulon, équipement, couronne.stl" en un "engrenage, couronne (module 1.5, dents 12) .stl".
○ Faire glisser l'ensemble du boulon et de la couronne en un "espaceur, plat.stl", puis fixé en place avec un ensemble de joug en s'assurant que l'ensemble tournait librement.
○ Appuyez sur un "engrenage, couronne (module 1,5, dents 12) .stl" sur un "essieu, roues.stl" Alignant soigneusement l'engrenage avec la spline d'essieu.
○ Positionné l'essieu et l'ensemble de l'équipement de la couronne en un seul "corps, à droite", avec l'équipement adjacent au corps.
○ Appuyez sur l'assemblage de joug dans le corps.
○ Appuyez sur "Body, Left.stl" sur l'assemblage.
○ Fiffée de deux "roues, rht.stl" sur les fils d'assemblage de l'essieu et de la couronne et a aligné les joints à billes.
○ Positionnée et fixée en place quatre "espaceurs, rond.stl" dans l'assemblage du corps en utilisant huit "boulon, 6 mm, 3,8 mm épaule.stl".
○ Placé un "" "pivot, épaule.stl" dans un "pivot, wing.stl" puis fixé en place avec un "boulon pivot wing.stl" s'assurer que l'ensemble tournait librement.
○ Réglage une "aile, à droite.stl" sur l'ensemble de l'épaule en utilisant un "boulon, 6 mm, 2,8 mm épaule.stl".
○ a cassé une extrémité de "Rielle reliant un trou de 6,3 mm.stl" sur la boule de l'ensemble de l'aile.
○ Positionné l'ensemble de l'aile sur l'épaule du côté droit du corps, puis fixé en place avec un "boulon, 6 mm, 4,4 mm épaule.stl".
○ a cassé l'extrémité restante de la bielle sur la balle sur la roue à droite, puis s'est assuré que l'ensemble tournait librement.
○ Répétez les étapes d'assemblage de l'aile pour l'aile gauche.
○ Fiffé un "essieu, lecteur.stl" dans l'extrémité libre de l'articulation universelle.
○ Fiffée d'un ensemble de joints universels sur l'extrémité libre de l'essieu d'entraînement.
○ Positionné un "tail.stl" entre les cadres et fixé en place avec deux "gras, 6 mm, 4,4 mm épaule.stl".
J'ai assemblé le colibri à gauche (jaune dans l'image de couverture) comme j'ai fait à droite à l'exception de l'inversion de l'orientation de l'essieu et de l'assemblage de la couronne de telle sorte que l'engrenage est adjacent au corps gauche (par ex. Un "bec à bec" d'image du miroir " ).
Assemblez la base.
J'ai assemblé la base comme suit:
○ Cergé le moteur au connecteur coaxial (facultatif) de sorte que l'arbre du moteur tourne dans le sens horaire lorsqu'il est vu à partir de l'extrémité de l'arbre du moteur du moteur.
○ Appuyez sur le moteur dans "Base.stl".
○ Réglage le câble coaxial à l'ensemble de base à l'aide de l'écrou inclus.
○ Appuyez sur "MOTEUR, MOTEUR (Module 1.1, dents 10) .Stl" sur l'arbre du moteur.
○ Positionné un "équipement, joug, entraînement (module 1.1, dents 20) .Stl" Assemblage (assemblé à l'étape précédente) dans l'assemblage de base et un coupleur en filetage ", 18mm.stl" dans les filetages d'engrenage.
○ Généraire fileté "Worm.stl" sur le coupleur.
○ Fiffée un "coupleur, 4,4 mm" dans l'extrémité libre de l'assemblage de joug à engouez.
○ Fillé le «coupleur» restant dans le pignon de ver.
○ Fiffelz un assemblage de joug sur le coupleur.
○ Filetage un coupleur, 4 mm dans l'extrémité libre de l'assemblage de joug.
○ Positionnée "Gear.stl" dans l'assemblage de base puis fixée en place avec un "boulon, 6 mm, 4,4 mm épaule.stl".
○ Réglage un "bras, Gear.stl" sur "ARM.stl" en utilisant un "boulon, 6 mm, 4,4 mm épaule.stl".
○ Réglage cet ensemble de bras dans l'extrémité gauche de l'ensemble de base à l'aide de deux "boulon, 6 mm, 4,4 mm épaule.stl" s'assurer que le bras pivotait librement.
○ Réglage le "bras, Gear.stl" restant "sur" bras, offset.stl "(sur la face extérieure du bras décalé) en utilisant un" boulon, 6 mm, 4,4 mm épaule.stl ".
○ Réglage cet ensemble de bras dans l'extrémité droite de l'ensemble de base à l'aide de deux "boulon, 6 mm, 4,4 mm épaule.stl" s'assurer que le bras pivotait librement.
○ Réglage les extrémités libres de chaque bras d'engrenage à l'engrenage à l'aide d'un "essieu, bras, équipement.stl".
○ a appliqué la puissance au moteur et a permis au bras gauche de se déplacer vers la limite la plus basse, puis a retiré la puissance.
○ Couper "COUVERTURE, gauche.stl" sur l'extrémité libre du bras gauche, la glisser en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
○ a appliqué la puissance au moteur et a permis au bras droit de se déplacer vers la limite la plus basse, puis a supprimé la puissance.
○ Couper "Couverture, à droite.stl" sur l'extrémité libre du bras droit, la glissa en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
○ Couper "COUVERTURE, gauche.stl" sur l'extrémité libre du bras gauche, la glisser en position, puis fixée en place avec quatre "boulon, 6 mm, 3,8 mm épaule.stl".
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes.
○ Positionné l'assemblage de l'oiseau gauche (jaune dans l'image de couverture) sur le bras gauche et fixé en place avec deux "boulon, 6 mm, 4,4 mm épaule.stl".
○ Filé le joug d'oiseau gauche sur le coupleur de base gauche.
○ Positionné l'assemblage d'oiseau droit (magenta dans l'image de couverture) sur le bras droit et fixé en place avec deux "boulon, 6 mm, 4,4 mm épaule.stl".
○ Filé le joug d'oiseau droit sur le coupleur de base droit.
○ Appuyez sur les deux "fleur.stl" sur "tiges" de telle sorte que les pétales plus longs étaient alignés verticalement.
○ Appuyez sur l'assemblage de la fleur et de la tige dans la base.
Et c'est ainsi que j'ai imprimé et assemblé des "colibris".
J'espère que vous l'avez apprécié!