蜂鸟。 3D打印





4821 视图 1 喜欢 0 下载 下载
https://youtu.be/2vsFSrN2SaA
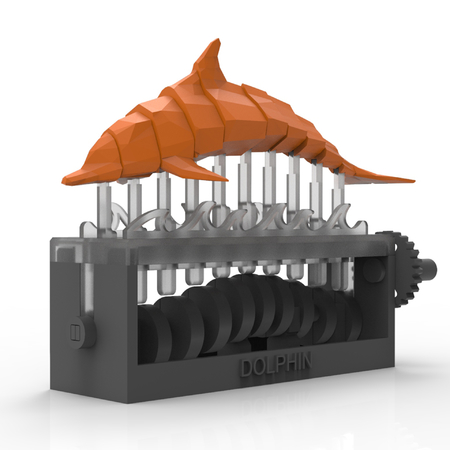
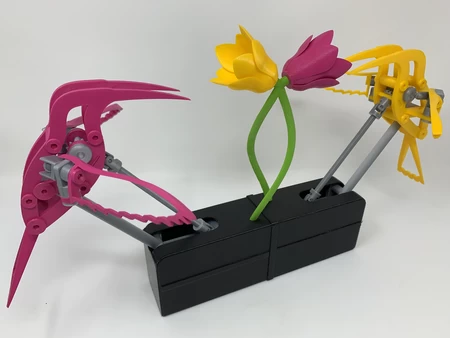
我的妻子喜欢蜂鸟,这就是我设计我的第一个蜂鸟自动机“蜂鸟”的原因(https://www....youmagine.com/designs/hummingbird)。那么,还有什么比拥有一个蜂鸟自动机更好呢?当然是这个双蜂鸟自动机“蜂鸟”!
“蜂鸟”由一百多个 3D 打印部件和三个购买部件组装而成,打印和组装绝对是一个挑战。
和往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果你有任何问题,请不要犹豫,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
我购买了以下零件:
○ 150rpm 齿轮马达(搜索“uxcell DC 3V 150RPM 微型减速马达迷你�...��轮箱,带 2 个端子,用于 RC 汽车机器人模型 DIY 发动机玩具”)。
○ 一个 3vdc 电源。
○ 一个适合电源连接器的同轴连接器(可选)。
随附文件“蜂鸟零件清单”包含此模型所需的 3D 打印零件的零件名称、数量、层高和填充设置。
“蜂鸟”是一种高精度打印和组装模型。组装前,对所有零件进行试装和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。小心地锉平与构建板接触的所有边缘,以确保构建板的所有“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来完成这一步。
“蜂鸟”也使用螺纹组装,因此我使用 6mm x1 丝锥和板牙进行螺纹清洁。
组装蜂鸟。
https://www.youtube.com/watch?v=AWzwdxY4i3w
我组装了右边的蜂鸟(封面图片中的洋红色):
○ 组装了视频中所示的六个万向节(视频中显示的五个,第六个使用“Gear, Yoke, Drive (Module 1.1, Teeth 20.stl”)。
○ 将一个“Bolt, Gear, Crown.stl”压入一个“Gear, Crown (Module 1.5, Teeth 12).stl”。
○ 将螺栓和冠齿轮组件滑入一个“Spacer, Flat.stl”,然后用一个轭组件固定到位,确保组件可以自由旋转。
○ 将一个“Gear, Crown (Module 1.5, Teeth 12).stl”压入一个“Axle, Wheels.stl”上,小心地将齿轮与轴花键对齐。
○ 将轴和冠齿轮组件定位到一个“Body, Right.stl”,齿轮与车身相邻。
○ 将轭组件压入车身。
○ 将“Body, Left.stl”压入组件。
○ 将两个“Wheel, RHT.stl”拧入轮轴和冠齿轮组件螺纹上,并对齐球窝接头。
○ 使用八个“Bolt, 6mm, 3.8mm Shoulder.stl”将四个“Spacer, Round.stl”定位并固定到车身组件中。
○ 将一个“Pivot, Shoulder.stl”放入一个“Pivot, Wing.stl”中,然后用一个“Bolt Pivot Wing.stl”固定到位,确保组件可以自由旋转。
○ 使用一个“Bolt, 6mm, 2.8mm Shoulder.stl”将一个“Wing, Right.stl”固定到肩部组件上。
○ 将“Rod Connecting 6.3mm Hole.stl”的一端卡在机翼组件的球上。
○ 将机翼组件定位到右侧车身的肩部上,然后用一个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将连接杆的剩余一端卡在右轮上的球上,然后确保组件可以自由旋转。
○ 重复左翼的机翼组装步骤。
○ 将一个“Axle, Drive.stl”拧入万向节的自由端。
○ 将一个万向节组件拧到驱动轴的自由端。
○ 将一个“Tail.stl”放置在框架之间,并用两个“Bold, 6mm, 4.4mm Shoulder.stl”固定到位。
我组装了左侧(封面图片中的黄色)蜂鸟,就像组装右侧蜂鸟一样,只是颠倒了轴和冠组件的方向,使得齿轮与左侧主体相邻(例如“喙对喙”镜像)。
组装底座。
我按如下方式组装底座:
○ 将电机连接到同轴连接器(可选),使得从电机轴端看时电机轴顺时针旋转。
○ 将电机压入“Base.stl”。
○ 使用附带的螺母将同轴电缆固定到底座组件上。
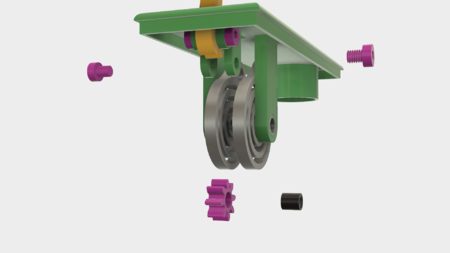
○ 将“Gear, Motor (Module 1.1, Teeth 10).stl”压到电机轴上。
○ 将一个“齿轮,轭,驱动(模块 1.1,齿 20).stl”组件(在上一步中组装)放置在底座组件中,并将一个“耦合器,18mm.stl”拧入齿轮螺纹中。
○ 将“齿轮,蜗杆.stl”拧到耦合器上。
○ 将一个“耦合器,4.4mm.stl”拧入齿轮轭组件的自由端。
○ 将剩余的“耦合器.stl”拧入蜗轮。
○ 将一个轭组件拧到耦合器上。
○ 将一个“Coupler, 4mm.stl”拧入轭架组件的自由端。
○ 将“Gear.stl”定位在底座组件中,然后用一个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 使用一个“Bolt, 6mm, 4.4mm Shoulder.stl”将一个“Arm, Gear.stl”固定到“Arm.stl”上。
○ 使用两个“Bolt, 6mm, 4.4mm Shoulder.stl”将此臂组件固定到底座组件的左端,确保臂可以自由旋转。
○ 使用一个“Bolt, 6mm, 4.4mm Shoulder.stl”将剩余的“Arm, Gear.stl”固定到“Arm, Offset.stl”(在偏移臂的外表面上)。
○ 使用两个“Bolt, 6mm, 4.4mm Shoulder.stl”将此臂组件固定到底座组件的右端,确保臂可自由旋转。
○ 使用一个“Axle, Arm, Gear.stl”将每个齿轮臂的自由端固定到齿轮上。
○ 给电机通电,让左臂移动到最低限度,然后断电。
○ 将“Cover, Left.stl”滑到左臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
○ 给电机通电,让右臂移动到最低限度,然后断电。
○ 将“Cover, Right.stl”滑到右臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
○ 将“Cover, Left.stl”滑到左臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
最终组装。
对于最终组装,我执行了以下步骤。
○ 将左鸟组件(封面图中为黄色)放置在左臂上,并用两个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将左鸟轭拧到左底座耦合器上。
○ 将右鸟组件(封面图中为洋红色)放置在右臂上,并用两个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将右鸟轭拧到右底座耦合器上。
○ 将两个“Flower.stl”按到“Stems.stl”上,使较长的花瓣垂直对齐。
○ 将花朵和茎组件压入底座。
这就是我打印和组装“蜂鸟”的方法。
希望你喜欢!
设计师
Greg Zumwalt3D 模型描述
蜂鸟。https://youtu.be/2vsFSrN2SaA
我的妻子喜欢蜂鸟,这就是我设计我的第一个蜂鸟自动机“蜂鸟”的原因(https://www....youmagine.com/designs/hummingbird)。那么,还有什么比拥有一个蜂鸟自动机更好呢?当然是这个双蜂鸟自动机“蜂鸟”!
“蜂鸟”由一百多个 3D 打印部件和三个购买部件组装而成,打印和组装绝对是一个挑战。
和往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果你有任何问题,请不要犹豫,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
3D模型打印参数
购买、打印和准备零件。我购买了以下零件:
○ 150rpm 齿轮马达(搜索“uxcell DC 3V 150RPM 微型减速马达迷你�...��轮箱,带 2 个端子,用于 RC 汽车机器人模型 DIY 发动机玩具”)。
○ 一个 3vdc 电源。
○ 一个适合电源连接器的同轴连接器(可选)。
随附文件“蜂鸟零件清单”包含此模型所需的 3D 打印零件的零件名称、数量、层高和填充设置。
“蜂鸟”是一种高精度打印和组装模型。组装前,对所有零件进行试装和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。小心地锉平与构建板接触的所有边缘,以确保构建板的所有“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来完成这一步。
“蜂鸟”也使用螺纹组装,因此我使用 6mm x1 丝锥和板牙进行螺纹清洁。
组装蜂鸟。
https://www.youtube.com/watch?v=AWzwdxY4i3w
我组装了右边的蜂鸟(封面图片中的洋红色):
○ 组装了视频中所示的六个万向节(视频中显示的五个,第六个使用“Gear, Yoke, Drive (Module 1.1, Teeth 20.stl”)。
○ 将一个“Bolt, Gear, Crown.stl”压入一个“Gear, Crown (Module 1.5, Teeth 12).stl”。
○ 将螺栓和冠齿轮组件滑入一个“Spacer, Flat.stl”,然后用一个轭组件固定到位,确保组件可以自由旋转。
○ 将一个“Gear, Crown (Module 1.5, Teeth 12).stl”压入一个“Axle, Wheels.stl”上,小心地将齿轮与轴花键对齐。
○ 将轴和冠齿轮组件定位到一个“Body, Right.stl”,齿轮与车身相邻。
○ 将轭组件压入车身。
○ 将“Body, Left.stl”压入组件。
○ 将两个“Wheel, RHT.stl”拧入轮轴和冠齿轮组件螺纹上,并对齐球窝接头。
○ 使用八个“Bolt, 6mm, 3.8mm Shoulder.stl”将四个“Spacer, Round.stl”定位并固定到车身组件中。
○ 将一个“Pivot, Shoulder.stl”放入一个“Pivot, Wing.stl”中,然后用一个“Bolt Pivot Wing.stl”固定到位,确保组件可以自由旋转。
○ 使用一个“Bolt, 6mm, 2.8mm Shoulder.stl”将一个“Wing, Right.stl”固定到肩部组件上。
○ 将“Rod Connecting 6.3mm Hole.stl”的一端卡在机翼组件的球上。
○ 将机翼组件定位到右侧车身的肩部上,然后用一个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将连接杆的剩余一端卡在右轮上的球上,然后确保组件可以自由旋转。
○ 重复左翼的机翼组装步骤。
○ 将一个“Axle, Drive.stl”拧入万向节的自由端。
○ 将一个万向节组件拧到驱动轴的自由端。
○ 将一个“Tail.stl”放置在框架之间,并用两个“Bold, 6mm, 4.4mm Shoulder.stl”固定到位。
我组装了左侧(封面图片中的黄色)蜂鸟,就像组装右侧蜂鸟一样,只是颠倒了轴和冠组件的方向,使得齿轮与左侧主体相邻(例如“喙对喙”镜像)。
组装底座。
我按如下方式组装底座:
○ 将电机连接到同轴连接器(可选),使得从电机轴端看时电机轴顺时针旋转。
○ 将电机压入“Base.stl”。
○ 使用附带的螺母将同轴电缆固定到底座组件上。
○ 将“Gear, Motor (Module 1.1, Teeth 10).stl”压到电机轴上。
○ 将一个“齿轮,轭,驱动(模块 1.1,齿 20).stl”组件(在上一步中组装)放置在底座组件中,并将一个“耦合器,18mm.stl”拧入齿轮螺纹中。
○ 将“齿轮,蜗杆.stl”拧到耦合器上。
○ 将一个“耦合器,4.4mm.stl”拧入齿轮轭组件的自由端。
○ 将剩余的“耦合器.stl”拧入蜗轮。
○ 将一个轭组件拧到耦合器上。
○ 将一个“Coupler, 4mm.stl”拧入轭架组件的自由端。
○ 将“Gear.stl”定位在底座组件中,然后用一个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 使用一个“Bolt, 6mm, 4.4mm Shoulder.stl”将一个“Arm, Gear.stl”固定到“Arm.stl”上。
○ 使用两个“Bolt, 6mm, 4.4mm Shoulder.stl”将此臂组件固定到底座组件的左端,确保臂可以自由旋转。
○ 使用一个“Bolt, 6mm, 4.4mm Shoulder.stl”将剩余的“Arm, Gear.stl”固定到“Arm, Offset.stl”(在偏移臂的外表面上)。
○ 使用两个“Bolt, 6mm, 4.4mm Shoulder.stl”将此臂组件固定到底座组件的右端,确保臂可自由旋转。
○ 使用一个“Axle, Arm, Gear.stl”将每个齿轮臂的自由端固定到齿轮上。
○ 给电机通电,让左臂移动到最低限度,然后断电。
○ 将“Cover, Left.stl”滑到左臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
○ 给电机通电,让右臂移动到最低限度,然后断电。
○ 将“Cover, Right.stl”滑到右臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
○ 将“Cover, Left.stl”滑到左臂的自由端上,将其滑入到位,然后用四个“Bolt, 6mm, 3.8mm Shoulder.stl”固定到位。
最终组装。
对于最终组装,我执行了以下步骤。
○ 将左鸟组件(封面图中为黄色)放置在左臂上,并用两个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将左鸟轭拧到左底座耦合器上。
○ 将右鸟组件(封面图中为洋红色)放置在右臂上,并用两个“Bolt, 6mm, 4.4mm Shoulder.stl”固定到位。
○ 将右鸟轭拧到右底座耦合器上。
○ 将两个“Flower.stl”按到“Stems.stl”上,使较长的花瓣垂直对齐。
○ 将花朵和茎组件压入底座。
这就是我打印和组装“蜂鸟”的方法。
希望你喜欢!