Dark 3.0 3d pour imprimer


5952 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
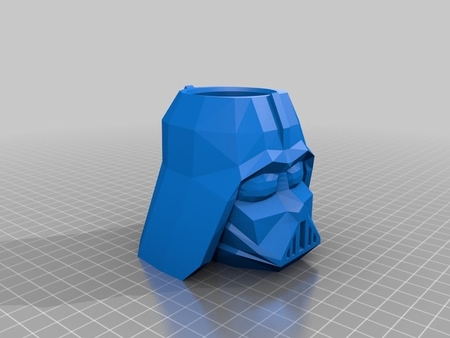
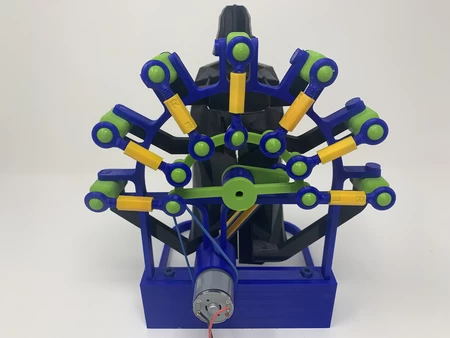
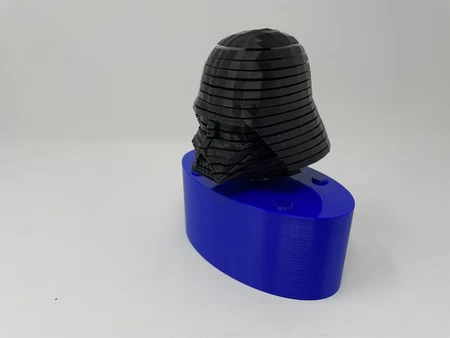
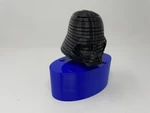
J'ai conçu et imprimé en 3...D "Dark 3.0: un casque Dark Vador animé imprimé en 3D" pour nos petits-enfants qui sont des fans de Star Wars! Cette version 3.0 intègre un ESP32, des pilotes de moteur pas à pas et des moteurs pas à pas pour fournir une séquence d'animation plus compliquée et programmable.
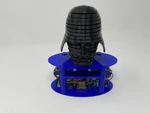
Comme dans ma précédente conception de casque animé Dark, le seul contact entre chaque tranche doit être les broches dans les fentes, donc une impression 3D prudente (pas de déformation) et l'assemblage (roulements complètement rincer avec le haut et le bas de chaque tranche) sont nécessaires pour réussir avec succès 3D Imprimez et assemblez ce modèle.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à commenter car je fais beaucoup d'erreurs. Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide d'Ultimaker Cura 4.8.0 et 3D imprimé en PLA sur Ultimaker S5S.
J'ai acquis les parties suivantes:
• Une carte Adafruit Feather ESP32.
• Un "Kit de moteur pas à pas de 6pcs 28BYJ-48".
• Deux micro... interrupteurs de levier à rouleaux (Cylewet 20pcs Hinge Metal Metal Roller Lever Micro Switch AC 5A 125 250V SPDT 3 PINS (paquet de 20) CYT1096).
• Vingt "Uxcell 6700-2R Roulements à billes de rainure profonde Z2 10 mm x • 15 mm x 4 mm en acier chromé à double scellé".
• Quatre vis de capuchon de m2 par 20 mm.
• Quatre noix M2.
• Une alimentation USB avec un connecteur compatible avec le connecteur USB sur la carte ESP32.
I 3D a imprimé toutes les pièces à une hauteur de couche de 0,1 mm avec 20% de remplissage. I 3D a imprimé 4 "boulon, 4mm.stl", 4 "boulon, base.stl", 15 "spacer.stl" et un des parties restantes.
Ce mécanisme est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées de très petite précision 3D dans des espaces confinés avec un alignement très précis. J'ai imprimé en 3D toutes les pièces en utilisant le «profil d'ingénierie» Ultimaker Cura 4.8.0 sur mon Ultimaker S5S, ce qui fournit une tolérance très précise nécessitant un minimum de réglage, de dépôt, de forage ou de ponçage. Cependant, avant l'assemblage, je teste toujours ajusté et taillé, classé, foré, poncé, etc. Toutes les pièces nécessaires au besoin pour le mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon vos paramètres de trancheuse, imprimante, imprimantes et les couleurs que vous avez choisies, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires pour recréer avec succès ce modèle. J'ai soigneusement déposé tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses en utilisant de petits fichiers de bijoutiers et beaucoup de patience.
Ce mécanisme utilise également un ensemble fileté, j'ai donc utilisé un jeu de robinet et de matrice (4 mm par 1 et 8 mm par 1,25) comme requis pour le nettoyage du fil.
Ensemble de plaques inférieur.
Pour assembler l'ensemble de plaque inférieur, j'ai effectué les étapes suivantes.
• Attaché "Slice01 Commutateur, levier, rouleau, retenue.stl" et l'un des micro-commutateurs de levier de rouleau en "plaque, inférieur.stl" en utilisant deux vis de capuchon M2 par 20 mm et deux écrous M2 comme indiqué.
• Attaché "Slice18 Interrupteur, levier, rouleau, retenue.stl" et le levier à rouleau restant micro interrupteur à l'ensemble de plaque à l'aide de deux vis de capuchon M2 par 20 mm et deux écrous M2 comme indiqué.
• Attaché le moteur pas à pas Slice01 à l'ensemble de la plaque à l'aide de deux "boulon, 4 mm" comme indiqué.
• Attaché le moteur pas à pas Slice18 à l'ensemble de la plaque à l'aide de deux "boulon, 4 mm" comme indiqué.
• Appuyez sur "Motor, moteur, tranche18.stl" sur le moteur pas à pas Slice18 comme indiqué.
• Affaire cet engrenage jusqu'à ce que le bras soit centré sur le micro-commutateur du levier de rouleau SLICE18, puis a soigneusement positionné l'interrupteur et la retenue de telle sorte que l'interrupteur soit activé avec le bras centré sur le rouleau, désactivé avec le bras hors du rouleau, et le rouleau n'a pas fait lier avec le bras. Lorsqu'il est aligné, j'ai resserré les vis de capuchon pour maintenir l'interrupteur et la retenue dans la bonne position.
• Appuyez sur "Gear, moteur, tranche01, arm.stl" sur le moteur pas à pas Slice01 comme indiqué.
• Affait ce bras jusqu'à ce que le bras soit centré sur l'interrupteur Slice01 Roller Lever Lever, puis a soigneusement positionné l'interrupteur et la retenue de telle sorte que l'interrupteur soit activé avec le bras centré sur le rouleau, désactivé avec le bras hors du rouleau, et le rouleau n'a pas fait lier avec le bras. Lorsqu'il est aligné, j'ai resserré les vis de capuchon pour maintenir l'interrupteur et la retenue dans la bonne position.
Câblage.
À partir des pulls de câble de ruban inclus dans le kit de moteur pas à pas, j'ai créé deux câbles de ruban, chacun ayant les couleurs bleues, vertes, jaunes et oranges, et coupe les en-têtes femelles de chaque câble de telle sorte qu'une longueur de fil de 70 mm a été fixée à l'en-tête féminine .
Pour câbler l'ESP32, j'ai effectué les étapes suivantes:
• Souder un ensemble de connecteurs femelle bleu, jaune vert et orange avec le fil bleu soudé à A0, le fil vert soudé à A1, le fil jaune soudé à A5 et le fil orange soudé à 21 sur la carte ESP32.
• Souder l'ensemble de connecteur femelle bleu, vert, jaune et orange restant avec le fil bleu soudé à A6, le fil vert soudé à A7, le fil jaune soudé à A8 et le fil orange soudé à A9 sur la carte ESP32.
• Souder une longueur de 80 mm de fil noir sur la broche GND sur la carte ESP32, et une longueur de 80 mm de fil rouge sur la broche USB sur la carte ESP32.
• Souder une longueur de 100 mm de fil jaune à la broche 13 sur la carte ESP32.
• Souder une longueur de 100 mm de fil vert à la broche 27 sur la carte ESP32.
Pour câbler le conducteur du moteur Slice01, j'ai effectué les étapes suivantes:
• Connecté le connecteur femelle Blue A0 à PIN IN1 sur le conducteur du moteur.
• Connecté le connecteur féminin vert A1 pour épingler en2 sur le conducteur du moteur.
• Connecté le connecteur femelle A5 jaune à épingler en3 sur le conducteur du moteur.
• Connecté le connecteur féminin Orange 21 à PIN IN4 sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier rouge, coupez le cavalier de sorte que 100 mm de fil a été fixé au connecteur femelle, puis branché le connecteur femelle à la broche + sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier noir, coupé le cavalier de sorte que 100 mm de fil a été fixé au connecteur féminin, puis branché le connecteur femelle à la broche du conducteur du moteur.
Pour câbler le conducteur du moteur Slice18, j'ai effectué les étapes suivantes:
• Connecté le connecteur féminin Blue A6 à PIN IN1 sur le conducteur du moteur.
• Connecté le connecteur féminin Green A7 pour épingler en2 sur le conducteur du moteur.
• Connecté le connecteur femelle A8 jaune à épingler en3 sur le conducteur du moteur.
• Connecté le connecteur féminin Orange A9 à épingler IN4 sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier rouge, coupez le cavalier de sorte que 100 mm de fil a été fixé au connecteur femelle, puis branché le connecteur femelle à la broche + sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier noir, coupé le cavalier de sorte que 100 mm de fil a été fixé au connecteur féminin, puis branché le connecteur femelle à la broche du conducteur du moteur.
Pour terminer le câblage, j'ai effectué les étapes suivantes:
• Souder une longueur de 140 mm de fil noir de la borne commune de commutation01 à la borne commune de commutation18.
• Souder une longueur de 100 mm de fil noir à la borne commune du commutateur01.
• Souder le fil jaune de la broche 13 sur la carte ESP32 à la borne Switch01 ouverte normalement.
• Souder le fil vert de la broche 27 sur la carte ESP32 à la borne Switch18 ouverte normalement.
• Souder les extrémités libres des quatre fils noirs (un de Switch01, un de chaque contrôleur de moteur pas à pas, et un de l'ESP32) ensemble et a recouvert le joint de soudure avec des tubes thermiques.
• Souder les extrémités libres des trois fils rouges (un de chaque contrôleur de moteur pas à pas, et un de l'ESP32) ensemble et a couvert le joint de soudure avec des tubes thermiques.
• Branché le câble de moteur pas à pas Slice01 dans le connecteur du contrôleur de moteur pas à pas Slice01.
• Branché le câble de moteur pas à pas Slice18 dans le connecteur du contrôleur de moteur pas à pas Slice18.
Logiciel.
J'ai écrit le logiciel "Darthreepointzero.ino" pour "Dark 3.0: un casque Dark Vador animé en 3D" dans l'environnement Arduino 1.8.13 sur MacOS Big Sur. J'ai conçu le logiciel pour aucune bibliothèque externe (dépendances) dans l'espoir qu'il était plus facile pour tout le monde de compiler et de télécharger.
Pour compiler et télécharger le logiciel sur ESP32, j'ai connecté un câble USB entre mon ordinateur et l'ESP32, chargé "Darthreepointzero.ino" dans l'environnement Arduino, puis appuyé sur le bouton de flèche droit pour compiler et télécharger le logiciel dans l'ESP32.
Le logiciel est divisé en un certain nombre de sections, dont la première est la section "Constantes" définissant les numéros de broches, les modes de temporisation des routines de service d'interruption et les sous-modes, les commandes d'animation et les paramètres du moteur pas à pas.
La deuxième section «variables globales» définit les variables globales pour les interruptions et les tranches.
La troisième section "Interruptions" contient la routine de service d'interruption "OnTimer". Cette routine effectue tous les aspects du rendement des tranches et de l'exécution des commandes d'étape reçues de la fonction Arduino "Loop".
La troisième section "Arduino" contient les fonctions de configuration et de boucle Arduino standard. Dans la fonction de configuration, les affectations de broches sont créées et la routine de service d'interruption est établie et créée avec un sémaphore pour la fonction de boucle Arduino. La fonction de boucle Arduino est conçue pour exécuter un tableau de commandes d'animation. Il passe séquentiellement à travers le tableau "AnimationCommands []" et exécute la prochaine commande d'animation en séquence à la fin de la commande d'animation précédente telle que déterminée en recevant un sémaphore de la routine de service d'interruption "OnTimer".
La dernière section "Utilitaires", contient des sous-programmes conçus uniquement pour la routine de service d'interruption, y compris "Motorslice01Off ()" conçu pour éteindre le moteur Slice01, "Motorslice01Step" conçu pour démarrer le moteur Slice01, "Motorslice18off ()" conçu pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner " Le moteur Slice18 éteint, et enfin "Motorslice18Step" conçu pour démarrer le moteur Slice18 une étape.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• Positionné les trois cartes de circuits imprimées dans "base.stl" comme indiqué.
• Positionné les deux engrenages à moteur de telle sorte que les bras étaient centrés sur leurs rouleaux d'interrupteur à levier de micro-rouleaux respectifs
• Positionné l'ensemble de plaque inférieur sur l'ensemble de base comme indiqué.
• Appuyez sur "essieu, tranche18.stl" dans "Gear, Slice18 (1M24T, .5NL) .stl".
• Positionné l'ensemble d'essieu Slice18 sur l'ensemble de base comme indiqué avec un côté plat de l'essieu hexagonal orienté vers l'avant.
• Position de "plaque, supérieur.stl" sur l'assemblage de base comme indiqué.
• Appuyez sur "Équipement, moteur, tranche01.stl" sur "Gear, moteur, tranche01, arm.stl".
• Slid "Gear, Slice18 (1m 24T .5BL) .Stl" sur la tour de plaque supérieure comme indiqué avec un côté plat de l'hexagonal face à l'avance.
• Positionné "Cover, top.stl" ou "Couvercle, haut et côtés.stl" sur l'assemblage comme indiqué, puis fixé en place à l'aide de quatre "boulon, base.stl".
• Placer "Slice01.stl" sur l'équipement Slice18.
• Appuyez sur un roulement dans "Slice02.Stl" à "Slice17.stl", en s'assurant que les roulements étaient parfaitement rincés avec les tranches.
• Gliez l'ensemble Slice02 sur la tour de plaque supérieure comme indiqué.
• glissé un "espacer.stl" sur la tranche.
• Répété les deux étapes précédentes pour les assemblages Slice03 via Slice16.
• Slice glissée17 sur la tour de plaque supérieure comme indiqué.
• Appuyez sur "Slice18.stl" sur le haut de l'assemblage de l'essieu Slice18.
Avec l'assemblage terminé, j'ai branché le câble USB dans l'alimentation ESP32 et USB, branché l'alimentation en alimentation secteur, et il est allé!
Et c'est ainsi que j'ai imprimé en 3D et assemblé "Dark 3.0: un casque Dark Vader animé en 3D".
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Un casque Dark Vador Dark Vador imprimé en 3D, contrôlé par ESP32, conduit à un pas à pas et animé avec couverture.J'ai conçu et imprimé en 3...D "Dark 3.0: un casque Dark Vador animé imprimé en 3D" pour nos petits-enfants qui sont des fans de Star Wars! Cette version 3.0 intègre un ESP32, des pilotes de moteur pas à pas et des moteurs pas à pas pour fournir une séquence d'animation plus compliquée et programmable.
Comme dans ma précédente conception de casque animé Dark, le seul contact entre chaque tranche doit être les broches dans les fentes, donc une impression 3D prudente (pas de déformation) et l'assemblage (roulements complètement rincer avec le haut et le bas de chaque tranche) sont nécessaires pour réussir avec succès 3D Imprimez et assemblez ce modèle.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à commenter car je fais beaucoup d'erreurs. Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide d'Ultimaker Cura 4.8.0 et 3D imprimé en PLA sur Ultimaker S5S.
Paramètres d'impression du modèle 3D
Parties.J'ai acquis les parties suivantes:
• Une carte Adafruit Feather ESP32.
• Un "Kit de moteur pas à pas de 6pcs 28BYJ-48".
• Deux micro... interrupteurs de levier à rouleaux (Cylewet 20pcs Hinge Metal Metal Roller Lever Micro Switch AC 5A 125 250V SPDT 3 PINS (paquet de 20) CYT1096).
• Vingt "Uxcell 6700-2R Roulements à billes de rainure profonde Z2 10 mm x • 15 mm x 4 mm en acier chromé à double scellé".
• Quatre vis de capuchon de m2 par 20 mm.
• Quatre noix M2.
• Une alimentation USB avec un connecteur compatible avec le connecteur USB sur la carte ESP32.
I 3D a imprimé toutes les pièces à une hauteur de couche de 0,1 mm avec 20% de remplissage. I 3D a imprimé 4 "boulon, 4mm.stl", 4 "boulon, base.stl", 15 "spacer.stl" et un des parties restantes.
Ce mécanisme est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées de très petite précision 3D dans des espaces confinés avec un alignement très précis. J'ai imprimé en 3D toutes les pièces en utilisant le «profil d'ingénierie» Ultimaker Cura 4.8.0 sur mon Ultimaker S5S, ce qui fournit une tolérance très précise nécessitant un minimum de réglage, de dépôt, de forage ou de ponçage. Cependant, avant l'assemblage, je teste toujours ajusté et taillé, classé, foré, poncé, etc. Toutes les pièces nécessaires au besoin pour le mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon vos paramètres de trancheuse, imprimante, imprimantes et les couleurs que vous avez choisies, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires pour recréer avec succès ce modèle. J'ai soigneusement déposé tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses en utilisant de petits fichiers de bijoutiers et beaucoup de patience.
Ce mécanisme utilise également un ensemble fileté, j'ai donc utilisé un jeu de robinet et de matrice (4 mm par 1 et 8 mm par 1,25) comme requis pour le nettoyage du fil.
Ensemble de plaques inférieur.
Pour assembler l'ensemble de plaque inférieur, j'ai effectué les étapes suivantes.
• Attaché "Slice01 Commutateur, levier, rouleau, retenue.stl" et l'un des micro-commutateurs de levier de rouleau en "plaque, inférieur.stl" en utilisant deux vis de capuchon M2 par 20 mm et deux écrous M2 comme indiqué.
• Attaché "Slice18 Interrupteur, levier, rouleau, retenue.stl" et le levier à rouleau restant micro interrupteur à l'ensemble de plaque à l'aide de deux vis de capuchon M2 par 20 mm et deux écrous M2 comme indiqué.
• Attaché le moteur pas à pas Slice01 à l'ensemble de la plaque à l'aide de deux "boulon, 4 mm" comme indiqué.
• Attaché le moteur pas à pas Slice18 à l'ensemble de la plaque à l'aide de deux "boulon, 4 mm" comme indiqué.
• Appuyez sur "Motor, moteur, tranche18.stl" sur le moteur pas à pas Slice18 comme indiqué.
• Affaire cet engrenage jusqu'à ce que le bras soit centré sur le micro-commutateur du levier de rouleau SLICE18, puis a soigneusement positionné l'interrupteur et la retenue de telle sorte que l'interrupteur soit activé avec le bras centré sur le rouleau, désactivé avec le bras hors du rouleau, et le rouleau n'a pas fait lier avec le bras. Lorsqu'il est aligné, j'ai resserré les vis de capuchon pour maintenir l'interrupteur et la retenue dans la bonne position.
• Appuyez sur "Gear, moteur, tranche01, arm.stl" sur le moteur pas à pas Slice01 comme indiqué.
• Affait ce bras jusqu'à ce que le bras soit centré sur l'interrupteur Slice01 Roller Lever Lever, puis a soigneusement positionné l'interrupteur et la retenue de telle sorte que l'interrupteur soit activé avec le bras centré sur le rouleau, désactivé avec le bras hors du rouleau, et le rouleau n'a pas fait lier avec le bras. Lorsqu'il est aligné, j'ai resserré les vis de capuchon pour maintenir l'interrupteur et la retenue dans la bonne position.
Câblage.
À partir des pulls de câble de ruban inclus dans le kit de moteur pas à pas, j'ai créé deux câbles de ruban, chacun ayant les couleurs bleues, vertes, jaunes et oranges, et coupe les en-têtes femelles de chaque câble de telle sorte qu'une longueur de fil de 70 mm a été fixée à l'en-tête féminine .
Pour câbler l'ESP32, j'ai effectué les étapes suivantes:
• Souder un ensemble de connecteurs femelle bleu, jaune vert et orange avec le fil bleu soudé à A0, le fil vert soudé à A1, le fil jaune soudé à A5 et le fil orange soudé à 21 sur la carte ESP32.
• Souder l'ensemble de connecteur femelle bleu, vert, jaune et orange restant avec le fil bleu soudé à A6, le fil vert soudé à A7, le fil jaune soudé à A8 et le fil orange soudé à A9 sur la carte ESP32.
• Souder une longueur de 80 mm de fil noir sur la broche GND sur la carte ESP32, et une longueur de 80 mm de fil rouge sur la broche USB sur la carte ESP32.
• Souder une longueur de 100 mm de fil jaune à la broche 13 sur la carte ESP32.
• Souder une longueur de 100 mm de fil vert à la broche 27 sur la carte ESP32.
Pour câbler le conducteur du moteur Slice01, j'ai effectué les étapes suivantes:
• Connecté le connecteur femelle Blue A0 à PIN IN1 sur le conducteur du moteur.
• Connecté le connecteur féminin vert A1 pour épingler en2 sur le conducteur du moteur.
• Connecté le connecteur femelle A5 jaune à épingler en3 sur le conducteur du moteur.
• Connecté le connecteur féminin Orange 21 à PIN IN4 sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier rouge, coupez le cavalier de sorte que 100 mm de fil a été fixé au connecteur femelle, puis branché le connecteur femelle à la broche + sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier noir, coupé le cavalier de sorte que 100 mm de fil a été fixé au connecteur féminin, puis branché le connecteur femelle à la broche du conducteur du moteur.
Pour câbler le conducteur du moteur Slice18, j'ai effectué les étapes suivantes:
• Connecté le connecteur féminin Blue A6 à PIN IN1 sur le conducteur du moteur.
• Connecté le connecteur féminin Green A7 pour épingler en2 sur le conducteur du moteur.
• Connecté le connecteur femelle A8 jaune à épingler en3 sur le conducteur du moteur.
• Connecté le connecteur féminin Orange A9 à épingler IN4 sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier rouge, coupez le cavalier de sorte que 100 mm de fil a été fixé au connecteur femelle, puis branché le connecteur femelle à la broche + sur le conducteur du moteur.
• À partir du câble du ruban restant, j'ai retiré un cavalier noir, coupé le cavalier de sorte que 100 mm de fil a été fixé au connecteur féminin, puis branché le connecteur femelle à la broche du conducteur du moteur.
Pour terminer le câblage, j'ai effectué les étapes suivantes:
• Souder une longueur de 140 mm de fil noir de la borne commune de commutation01 à la borne commune de commutation18.
• Souder une longueur de 100 mm de fil noir à la borne commune du commutateur01.
• Souder le fil jaune de la broche 13 sur la carte ESP32 à la borne Switch01 ouverte normalement.
• Souder le fil vert de la broche 27 sur la carte ESP32 à la borne Switch18 ouverte normalement.
• Souder les extrémités libres des quatre fils noirs (un de Switch01, un de chaque contrôleur de moteur pas à pas, et un de l'ESP32) ensemble et a recouvert le joint de soudure avec des tubes thermiques.
• Souder les extrémités libres des trois fils rouges (un de chaque contrôleur de moteur pas à pas, et un de l'ESP32) ensemble et a couvert le joint de soudure avec des tubes thermiques.
• Branché le câble de moteur pas à pas Slice01 dans le connecteur du contrôleur de moteur pas à pas Slice01.
• Branché le câble de moteur pas à pas Slice18 dans le connecteur du contrôleur de moteur pas à pas Slice18.
Logiciel.
J'ai écrit le logiciel "Darthreepointzero.ino" pour "Dark 3.0: un casque Dark Vador animé en 3D" dans l'environnement Arduino 1.8.13 sur MacOS Big Sur. J'ai conçu le logiciel pour aucune bibliothèque externe (dépendances) dans l'espoir qu'il était plus facile pour tout le monde de compiler et de télécharger.
Pour compiler et télécharger le logiciel sur ESP32, j'ai connecté un câble USB entre mon ordinateur et l'ESP32, chargé "Darthreepointzero.ino" dans l'environnement Arduino, puis appuyé sur le bouton de flèche droit pour compiler et télécharger le logiciel dans l'ESP32.
Le logiciel est divisé en un certain nombre de sections, dont la première est la section "Constantes" définissant les numéros de broches, les modes de temporisation des routines de service d'interruption et les sous-modes, les commandes d'animation et les paramètres du moteur pas à pas.
La deuxième section «variables globales» définit les variables globales pour les interruptions et les tranches.
La troisième section "Interruptions" contient la routine de service d'interruption "OnTimer". Cette routine effectue tous les aspects du rendement des tranches et de l'exécution des commandes d'étape reçues de la fonction Arduino "Loop".
La troisième section "Arduino" contient les fonctions de configuration et de boucle Arduino standard. Dans la fonction de configuration, les affectations de broches sont créées et la routine de service d'interruption est établie et créée avec un sémaphore pour la fonction de boucle Arduino. La fonction de boucle Arduino est conçue pour exécuter un tableau de commandes d'animation. Il passe séquentiellement à travers le tableau "AnimationCommands []" et exécute la prochaine commande d'animation en séquence à la fin de la commande d'animation précédente telle que déterminée en recevant un sémaphore de la routine de service d'interruption "OnTimer".
La dernière section "Utilitaires", contient des sous-programmes conçus uniquement pour la routine de service d'interruption, y compris "Motorslice01Off ()" conçu pour éteindre le moteur Slice01, "Motorslice01Step" conçu pour démarrer le moteur Slice01, "Motorslice18off ()" conçu pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner pour tourner " Le moteur Slice18 éteint, et enfin "Motorslice18Step" conçu pour démarrer le moteur Slice18 une étape.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• Positionné les trois cartes de circuits imprimées dans "base.stl" comme indiqué.
• Positionné les deux engrenages à moteur de telle sorte que les bras étaient centrés sur leurs rouleaux d'interrupteur à levier de micro-rouleaux respectifs
• Positionné l'ensemble de plaque inférieur sur l'ensemble de base comme indiqué.
• Appuyez sur "essieu, tranche18.stl" dans "Gear, Slice18 (1M24T, .5NL) .stl".
• Positionné l'ensemble d'essieu Slice18 sur l'ensemble de base comme indiqué avec un côté plat de l'essieu hexagonal orienté vers l'avant.
• Position de "plaque, supérieur.stl" sur l'assemblage de base comme indiqué.
• Appuyez sur "Équipement, moteur, tranche01.stl" sur "Gear, moteur, tranche01, arm.stl".
• Slid "Gear, Slice18 (1m 24T .5BL) .Stl" sur la tour de plaque supérieure comme indiqué avec un côté plat de l'hexagonal face à l'avance.
• Positionné "Cover, top.stl" ou "Couvercle, haut et côtés.stl" sur l'assemblage comme indiqué, puis fixé en place à l'aide de quatre "boulon, base.stl".
• Placer "Slice01.stl" sur l'équipement Slice18.
• Appuyez sur un roulement dans "Slice02.Stl" à "Slice17.stl", en s'assurant que les roulements étaient parfaitement rincés avec les tranches.
• Gliez l'ensemble Slice02 sur la tour de plaque supérieure comme indiqué.
• glissé un "espacer.stl" sur la tranche.
• Répété les deux étapes précédentes pour les assemblages Slice03 via Slice16.
• Slice glissée17 sur la tour de plaque supérieure comme indiqué.
• Appuyez sur "Slice18.stl" sur le haut de l'assemblage de l'essieu Slice18.
Avec l'assemblage terminé, j'ai branché le câble USB dans l'alimentation ESP32 et USB, branché l'alimentation en alimentation secteur, et il est allé!
Et c'est ainsi que j'ai imprimé en 3D et assemblé "Dark 3.0: un casque Dark Vader animé en 3D".
J'espère que vous l'avez apprécié!