达斯 3.0 3D打印


5866 视图 1 喜欢 0 下载 下载
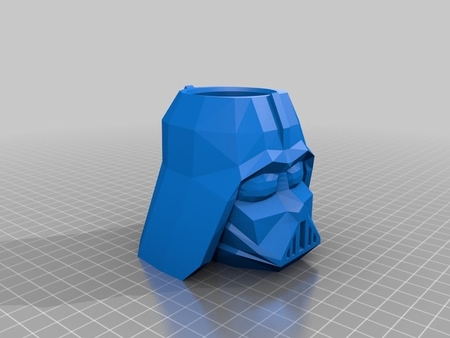
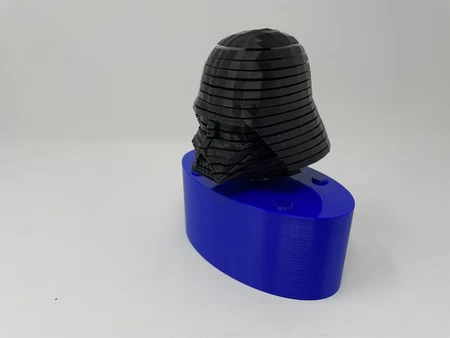
我设计并 3D 打印了“Darth 3.0:3D 打印动画达斯维达头�...��”,送给我们的孙子们,他们是星球大战的粉丝!这个 3.0 版本结合了 ESP32、步进电机驱动器和步进电机,以提供更复杂和可编程的动画序列。
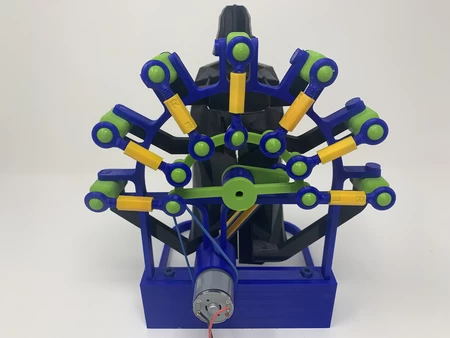
与我之前的达斯动画头盔设计一样,每个切片之间的唯一接触必须是插槽中的插针,因此需要仔细的 3D 打印(无翘曲)和组装(轴承与每个切片的顶部和底部完全齐平)才能成功 3D 打印和组装此模型。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时发表评论,因为我确实犯了很多错误。使用 Autodesk Fusion 360 设计,使用 Ultimaker Cura 4.8.0 切片,并在 Ultimaker S5s 上使用 PLA 进行 3D 打印。
我获得了以下零件:
• 一块 Adafruit Feather ESP32 板。
• 一个“6PCS 28BYJ-48 步进电机套件”。
• 两个滚轮�...��微动开关(Cylewet 20Pcs 瞬时铰链金属滚轮杆微动开关 AC 5A 125 250V SPDT 3 针(20 件装)CYT1096)。
• 二十个“uxcell 6700-2RS 深沟球轴承 Z2 10mm x • 15mm x 4mm 双密封铬钢”。
• 四个 M2 x 20mm 盖螺钉。
• 四个 m2 螺母。
• 一个 USB 电源,其连接器与 ESP32 板上的 USB 连接器兼容。
我以 0.1mm 层高和 20% 填充率 3D 打印了所有零件。我 3D 打印了 4 个“Bolt, 4mm.stl”,4 个“Bolt, Base.stl”,15 个“Spacer.stl”和其余零件各一个。
该机制是一种高精度打印和组装,有时使用非常小的精度 3D 打印部件在狭窄的空间内进行高精度对齐。我使用 Ultimaker S5s 上的 Ultimaker Cura 4.8.0“工程配置文件”3D 打印了所有部件,它提供了高度精确的公差,几乎不需要任何修剪、锉削、钻孔或打磨。然而,在组装之前,我仍然对所有部件进行了测试安装和修剪、锉削、钻孔、打磨等,以确保移动表面的平稳移动,以及非移动表面的紧密贴合。根据您的切片机、打印机、打印机设置和您选择的颜色,可能需要或多或少的修剪、锉削、钻孔和/或打磨才能成功重新创建此模型。我使用小型珠宝锉和足够的耐心,仔细锉平了与底板接触的所有边缘,以确保底板的所有“渗出物”都被清除,并且所有边缘都光滑。
该机制还使用螺纹组件,因此我根据需要使用了丝锥和板牙套件(4mm x 1 和 8mm x 1.25)来清洁螺纹。
下板组件。
为了组装下板组件,我执行了以下步骤。
• 使用两个 M2 x 20mm 盖螺钉和两个 M2 螺母将“Slice01 Switch, Lever, Roller, Retainer.stl”和其中一个滚轮杆微动开关连接到“Plate, Lower.stl”,如图所示。
• 使用两个 M2 x 20mm 盖螺钉和两个 M2 螺母将“Slice18 Switch, Lever, Roller, Retainer.stl”和剩余的滚轮杆微动开关连接到底板组件,如图所示。
• 使用两个“Bolt, 4mm.stl”将slice01步进电机连接到板组件,如图所示。
• 使用两个“Bolt, 4mm.stl”将slice18步进电机连接到板组件,如图所示。
• 将“Gear, Motor, Slice18.stl”按到slice18步进电机上,如图所示。
• 旋转此齿轮,直到臂位于slice18滚轮杠杆微动开关的中心,然后小心地定位开关和固定器,使得开关在臂位于滚轮中心时激活,在臂离开滚轮时停用,并且滚轮不会与臂绑定。对齐后,我拧紧了带帽螺钉以将开关和固定器固定在正确的位置。
• 将“Gear, Motor, Slice01, Arm.stl”按到slice01步进电机上,如图所示。
• 旋转该臂,直到臂位于切片 01 滚轮杠杆微动开关的中心,然后小心地定位开关和固定器,使开关在臂位于滚轮中心时激活,在臂离开滚轮时停用,并且滚轮不会与臂绑定。对齐后,我拧紧了带帽螺钉以将开关和固定器固定在正确的位置。
接线。
我从步进电机套件中包含的带状电缆跳线创建了两条带状电缆,每条电缆的颜色为蓝色、绿色、黄色和橙色,并从每条电缆上剪下母头,以便将 70 毫米长的电线连接到母头上。
要连接 ESP32,我执行了以下步骤:
• 焊接一个蓝色、绿色、黄色和橙色母连接器组件,蓝色线焊接到 A0,绿色线焊接到 A1,黄色线焊接到 A5,橙色线焊接到 ESP32 板上的 21。
• 焊接剩余的蓝色、绿色、黄色和橙色母连接器组件,蓝色线焊接到 A6,绿色线焊接到 A7,黄色线焊接到 A8,橙色线焊接到 ESP32 板上的 A9。
• 将 80mm 长的黑线焊接到 ESP32 板上的 GND 引脚,将 80mm 长的红线焊接到 ESP32 板上的 USB 引脚。
• 将 100mm 长的黄线焊接到 ESP32 板上的引脚 13。
• 将 100mm 长的绿线焊接到 ESP32 板上的引脚 27。
要连接切片 01 电机驱动器,我执行了以下步骤:
• 将蓝色 A0 母连接器连接到电机驱动器上的引脚 IN1。
• 将绿色 A1 母连接器连接到电机驱动器上的引脚 IN2。
• 将黄色 A5 母连接器连接到电机驱动器上的引脚 IN3。
• 将橙色 21 号母连接器连接至电机驱动器上的 IN4 引脚。
• 我从剩余的带状电缆中移除了一条红色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 + 针脚。
• 我从剩余的带状电缆中移除了一条黑色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 - 针脚。
要连接 Slice18 电机驱动器,我执行了以下步骤:
• 将蓝色 A6 母连接器连接到电机驱动器的 IN1 针脚。
• 将绿色 A7 母连接器连接到电机驱动器的 IN2 针脚。
• 将黄色 A8 母连接器连接到电机驱动器的 IN3 针脚。
• 将橙色 A9 母连接器连接到电机驱动器的 IN4 针脚。
• 我从剩余的带状电缆中移除了一条红色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 + 针脚。
• 从剩余的带状电缆中,我移除了一条黑色跳线,剪断了跳线,使 100mm 长的电线连接到母连接器,然后将母连接器插入电机驱动器的 - 针。
为了完成接线,我执行了以下步骤:
• 将 140mm 长的黑线从 switch01 公共端子焊接到 switch18 公共端子。
• 将 100mm 长的黑线焊接到 switch01 公共端子。
• 将 ESP32 板上引脚 13 的黄线焊接到 switch01 常开端子。
• 将 ESP32 板上引脚 27 的绿线焊接到 switch18 常开端子。
• 将四条黑线的自由端(一根来自 switch01,一根来自每个步进电机控制器,一根来自 ESP32)焊接在一起,并用热缩管覆盖焊点。
• 将三根红线(一根来自每个步进电机控制器,一根来自 ESP32)的自由端焊接在一起,并用热缩管覆盖焊点。
• 将slice01步进电机电缆插入slice01步进电机控制器上的连接器。
• 将slice18步进电机电缆插入slice18步进电机控制器上的连接器。
软件。
我在MacOS Big Sur上的Arduino 1.8.13环境中为“Darth 3.0:3D打印动画达斯维达头盔”编写了软件“DarthThreePointZero.ino”。 我设计该软件时没有使用外部库(依赖项),希望每个人都能更轻松地编译和下载。
为了编译并将软件下载到 ESP32,我在计算机和 ESP32 之间连接了一条 USB 电缆,将“DarthThreePointZero.ino”加载到 Arduino 环境中,然后按下右箭头按钮编译并将软件下载到 ESP32 中。
该软件分为多个部分,第一部分是“常量”部分,定义引脚号、中断服务例程定时器模式和子模式、动画命令和步进电机参数。
第二部分“全局变量”定义中断和切片的全局变量。
第三部分“中断”包含中断服务例程“onTimer”。此例程执行归位切片和执行从 Arduino“循环”功能接收的步进命令的所有方面。
第三部分“Arduino”包含标准 Arduino 设置和循环功能。在设置功能中,创建引脚分配,并使用信号量为 Arduino 循环功能建立和创建中断服务例程。 Arduino 循环函数旨在执行一系列动画命令。它按顺序遍历“AnimationCommands[]”数组,并在完成上一个动画命令后按顺序执行下一个动画命令,该命令通过从中断服务例程“onTimer”接收信号量来确定。
最后一节“Utilities”包含仅为中断服务例程设计的子例程,包括用于关闭slice01电机的“MotorSlice01Off()”、用于使slice01电机前进一步的“MotorSlice01Step”、用于关闭slice18电机的“MotorSlice18Off()”,以及用于使slice18电机前进一步的“MotorSlice18Step”。
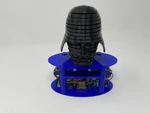
最终组装。
对于最终组装,我执行了以下步骤:
• 将三个电路板放置在“Base.stl”中,如图所示。
• 将两个电机齿轮定位在臂位于其各自的微型滚轮杆开关滚轮的中心位置
• 将下板组件定位在底座组件上方,如图所示。
• 将“Axle, Slice18.stl”按入“Gear, Slice18 (1m24t, .5nl).stl”。
• 将切片 18 轴组件定位在底座组件上,如图所示,六角轴的平面朝前。
• 将“Plate, Upper.stl”定位在底座组件上方,如图所示。
• 将“Gear, Motor, Slice01.stl”按入“Gear, Motor, Slice01, Arm.stl”。
• 将“Gear, Slice18 (1m 24t .5bl).stl”滑到上板塔上,如图所示,六边形的平面朝前。
• 将“Cover, Top.stl”或“Cover, Top and Sides.stl”放置在组件上方,如图所示,然后使用四个“Bolt, Base.stl”固定到位。
• 将“Slice01.stl”放在切片18齿轮上。
• 将一个轴承压入“Slice02.stl”至“Slice17.stl”,确保轴承与切片完全齐平。
• 将Slice02组件滑到上板塔上,如图所示。
• 将一个“Spacer.stl”滑到切片上。
• 对Slice03至Slice16组件重复前两个步骤。
• 将Slice17滑到上板塔上,如图所示。
• 将“Slice18.stl”压到slice18轴组件的顶部。
组装完成后,我将USB电缆插入ESP32和USB电源,将电源插入主电源,然后就可以使用了!
这就是我3D打印和组装“Darth 3.0:3D打印动画达斯维达头盔”的方法。
希望你喜欢!
设计师
Greg Zumwalt3D 模型描述
3D 打印、ESP32 控制、步进驱动、带盖的动画达斯维达头盔。我设计并 3D 打印了“Darth 3.0:3D 打印动画达斯维达头�...��”,送给我们的孙子们,他们是星球大战的粉丝!这个 3.0 版本结合了 ESP32、步进电机驱动器和步进电机,以提供更复杂和可编程的动画序列。
与我之前的达斯动画头盔设计一样,每个切片之间的唯一接触必须是插槽中的插针,因此需要仔细的 3D 打印(无翘曲)和组装(轴承与每个切片的顶部和底部完全齐平)才能成功 3D 打印和组装此模型。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时发表评论,因为我确实犯了很多错误。使用 Autodesk Fusion 360 设计,使用 Ultimaker Cura 4.8.0 切片,并在 Ultimaker S5s 上使用 PLA 进行 3D 打印。
3D模型打印参数
零件。我获得了以下零件:
• 一块 Adafruit Feather ESP32 板。
• 一个“6PCS 28BYJ-48 步进电机套件”。
• 两个滚轮�...��微动开关(Cylewet 20Pcs 瞬时铰链金属滚轮杆微动开关 AC 5A 125 250V SPDT 3 针(20 件装)CYT1096)。
• 二十个“uxcell 6700-2RS 深沟球轴承 Z2 10mm x • 15mm x 4mm 双密封铬钢”。
• 四个 M2 x 20mm 盖螺钉。
• 四个 m2 螺母。
• 一个 USB 电源,其连接器与 ESP32 板上的 USB 连接器兼容。
我以 0.1mm 层高和 20% 填充率 3D 打印了所有零件。我 3D 打印了 4 个“Bolt, 4mm.stl”,4 个“Bolt, Base.stl”,15 个“Spacer.stl”和其余零件各一个。
该机制是一种高精度打印和组装,有时使用非常小的精度 3D 打印部件在狭窄的空间内进行高精度对齐。我使用 Ultimaker S5s 上的 Ultimaker Cura 4.8.0“工程配置文件”3D 打印了所有部件,它提供了高度精确的公差,几乎不需要任何修剪、锉削、钻孔或打磨。然而,在组装之前,我仍然对所有部件进行了测试安装和修剪、锉削、钻孔、打磨等,以确保移动表面的平稳移动,以及非移动表面的紧密贴合。根据您的切片机、打印机、打印机设置和您选择的颜色,可能需要或多或少的修剪、锉削、钻孔和/或打磨才能成功重新创建此模型。我使用小型珠宝锉和足够的耐心,仔细锉平了与底板接触的所有边缘,以确保底板的所有“渗出物”都被清除,并且所有边缘都光滑。
该机制还使用螺纹组件,因此我根据需要使用了丝锥和板牙套件(4mm x 1 和 8mm x 1.25)来清洁螺纹。
下板组件。
为了组装下板组件,我执行了以下步骤。
• 使用两个 M2 x 20mm 盖螺钉和两个 M2 螺母将“Slice01 Switch, Lever, Roller, Retainer.stl”和其中一个滚轮杆微动开关连接到“Plate, Lower.stl”,如图所示。
• 使用两个 M2 x 20mm 盖螺钉和两个 M2 螺母将“Slice18 Switch, Lever, Roller, Retainer.stl”和剩余的滚轮杆微动开关连接到底板组件,如图所示。
• 使用两个“Bolt, 4mm.stl”将slice01步进电机连接到板组件,如图所示。
• 使用两个“Bolt, 4mm.stl”将slice18步进电机连接到板组件,如图所示。
• 将“Gear, Motor, Slice18.stl”按到slice18步进电机上,如图所示。
• 旋转此齿轮,直到臂位于slice18滚轮杠杆微动开关的中心,然后小心地定位开关和固定器,使得开关在臂位于滚轮中心时激活,在臂离开滚轮时停用,并且滚轮不会与臂绑定。对齐后,我拧紧了带帽螺钉以将开关和固定器固定在正确的位置。
• 将“Gear, Motor, Slice01, Arm.stl”按到slice01步进电机上,如图所示。
• 旋转该臂,直到臂位于切片 01 滚轮杠杆微动开关的中心,然后小心地定位开关和固定器,使开关在臂位于滚轮中心时激活,在臂离开滚轮时停用,并且滚轮不会与臂绑定。对齐后,我拧紧了带帽螺钉以将开关和固定器固定在正确的位置。
接线。
我从步进电机套件中包含的带状电缆跳线创建了两条带状电缆,每条电缆的颜色为蓝色、绿色、黄色和橙色,并从每条电缆上剪下母头,以便将 70 毫米长的电线连接到母头上。
要连接 ESP32,我执行了以下步骤:
• 焊接一个蓝色、绿色、黄色和橙色母连接器组件,蓝色线焊接到 A0,绿色线焊接到 A1,黄色线焊接到 A5,橙色线焊接到 ESP32 板上的 21。
• 焊接剩余的蓝色、绿色、黄色和橙色母连接器组件,蓝色线焊接到 A6,绿色线焊接到 A7,黄色线焊接到 A8,橙色线焊接到 ESP32 板上的 A9。
• 将 80mm 长的黑线焊接到 ESP32 板上的 GND 引脚,将 80mm 长的红线焊接到 ESP32 板上的 USB 引脚。
• 将 100mm 长的黄线焊接到 ESP32 板上的引脚 13。
• 将 100mm 长的绿线焊接到 ESP32 板上的引脚 27。
要连接切片 01 电机驱动器,我执行了以下步骤:
• 将蓝色 A0 母连接器连接到电机驱动器上的引脚 IN1。
• 将绿色 A1 母连接器连接到电机驱动器上的引脚 IN2。
• 将黄色 A5 母连接器连接到电机驱动器上的引脚 IN3。
• 将橙色 21 号母连接器连接至电机驱动器上的 IN4 引脚。
• 我从剩余的带状电缆中移除了一条红色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 + 针脚。
• 我从剩余的带状电缆中移除了一条黑色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 - 针脚。
要连接 Slice18 电机驱动器,我执行了以下步骤:
• 将蓝色 A6 母连接器连接到电机驱动器的 IN1 针脚。
• 将绿色 A7 母连接器连接到电机驱动器的 IN2 针脚。
• 将黄色 A8 母连接器连接到电机驱动器的 IN3 针脚。
• 将橙色 A9 母连接器连接到电机驱动器的 IN4 针脚。
• 我从剩余的带状电缆中移除了一条红色跳线,剪断了跳线,使 100mm 的电线连接到母连接器,然后将母连接器插入电机驱动器的 + 针脚。
• 从剩余的带状电缆中,我移除了一条黑色跳线,剪断了跳线,使 100mm 长的电线连接到母连接器,然后将母连接器插入电机驱动器的 - 针。
为了完成接线,我执行了以下步骤:
• 将 140mm 长的黑线从 switch01 公共端子焊接到 switch18 公共端子。
• 将 100mm 长的黑线焊接到 switch01 公共端子。
• 将 ESP32 板上引脚 13 的黄线焊接到 switch01 常开端子。
• 将 ESP32 板上引脚 27 的绿线焊接到 switch18 常开端子。
• 将四条黑线的自由端(一根来自 switch01,一根来自每个步进电机控制器,一根来自 ESP32)焊接在一起,并用热缩管覆盖焊点。
• 将三根红线(一根来自每个步进电机控制器,一根来自 ESP32)的自由端焊接在一起,并用热缩管覆盖焊点。
• 将slice01步进电机电缆插入slice01步进电机控制器上的连接器。
• 将slice18步进电机电缆插入slice18步进电机控制器上的连接器。
软件。
我在MacOS Big Sur上的Arduino 1.8.13环境中为“Darth 3.0:3D打印动画达斯维达头盔”编写了软件“DarthThreePointZero.ino”。 我设计该软件时没有使用外部库(依赖项),希望每个人都能更轻松地编译和下载。
为了编译并将软件下载到 ESP32,我在计算机和 ESP32 之间连接了一条 USB 电缆,将“DarthThreePointZero.ino”加载到 Arduino 环境中,然后按下右箭头按钮编译并将软件下载到 ESP32 中。
该软件分为多个部分,第一部分是“常量”部分,定义引脚号、中断服务例程定时器模式和子模式、动画命令和步进电机参数。
第二部分“全局变量”定义中断和切片的全局变量。
第三部分“中断”包含中断服务例程“onTimer”。此例程执行归位切片和执行从 Arduino“循环”功能接收的步进命令的所有方面。
第三部分“Arduino”包含标准 Arduino 设置和循环功能。在设置功能中,创建引脚分配,并使用信号量为 Arduino 循环功能建立和创建中断服务例程。 Arduino 循环函数旨在执行一系列动画命令。它按顺序遍历“AnimationCommands[]”数组,并在完成上一个动画命令后按顺序执行下一个动画命令,该命令通过从中断服务例程“onTimer”接收信号量来确定。
最后一节“Utilities”包含仅为中断服务例程设计的子例程,包括用于关闭slice01电机的“MotorSlice01Off()”、用于使slice01电机前进一步的“MotorSlice01Step”、用于关闭slice18电机的“MotorSlice18Off()”,以及用于使slice18电机前进一步的“MotorSlice18Step”。
最终组装。
对于最终组装,我执行了以下步骤:
• 将三个电路板放置在“Base.stl”中,如图所示。
• 将两个电机齿轮定位在臂位于其各自的微型滚轮杆开关滚轮的中心位置
• 将下板组件定位在底座组件上方,如图所示。
• 将“Axle, Slice18.stl”按入“Gear, Slice18 (1m24t, .5nl).stl”。
• 将切片 18 轴组件定位在底座组件上,如图所示,六角轴的平面朝前。
• 将“Plate, Upper.stl”定位在底座组件上方,如图所示。
• 将“Gear, Motor, Slice01.stl”按入“Gear, Motor, Slice01, Arm.stl”。
• 将“Gear, Slice18 (1m 24t .5bl).stl”滑到上板塔上,如图所示,六边形的平面朝前。
• 将“Cover, Top.stl”或“Cover, Top and Sides.stl”放置在组件上方,如图所示,然后使用四个“Bolt, Base.stl”固定到位。
• 将“Slice01.stl”放在切片18齿轮上。
• 将一个轴承压入“Slice02.stl”至“Slice17.stl”,确保轴承与切片完全齐平。
• 将Slice02组件滑到上板塔上,如图所示。
• 将一个“Spacer.stl”滑到切片上。
• 对Slice03至Slice16组件重复前两个步骤。
• 将Slice17滑到上板塔上,如图所示。
• 将“Slice18.stl”压到slice18轴组件的顶部。
组装完成后,我将USB电缆插入ESP32和USB电源,将电源插入主电源,然后就可以使用了!
这就是我3D打印和组装“Darth 3.0:3D打印动画达斯维达头盔”的方法。
希望你喜欢!