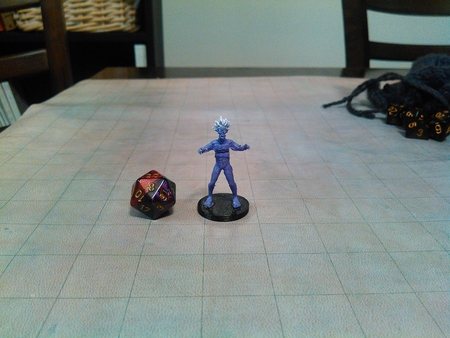
Halloween hay ghoth pin walker. 3d pour imprimer

























9667 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
Avec Halloween à seulement quelques semaines, et l'un de nos petits-fils sur le point de passer un autr...e samedi soir à notre maison (il est tellement sorti de Halloween que quand ici, il porte l'un des nombreux costumes d'Halloween, sa grand-mère, alias, ma femme, a acheté pour lui pour lui ), J'ai conçu ce "Halloween Happy Ghost Pin Walker", qui est basé sur ma précédente plate-forme de marcheur, pour compléter son costume fantôme.
J'ai conçu à la fois un fantôme Happy Ghost à deux et à extrusion, et Cura 4.2 a indiqué que le fantôme à double extrusion nécessiterait environ 3 heures à l'impression 3D, et les parties restantes, sont devenues un "imprimé de nuit" du vendredi soir. Quelques minutes de nettoyage, de soudure et d'assemblage samedi matin, et "Halloween Happy Ghost Pin Walker" était prêt pour l'arrivée de nos petits-fils.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide de Cura 4.2, et imprimé dans PLA sur un ultimaker 2+ étendu et un ultimaker 3 étendu.
Une dernière note, je ne reçois aucune compensation sous quelque forme que ce soit pour la conception, les pièces et / ou les matériaux utilisés dans ce modèle.
J'ai utilisé les fournitures suivantes:
• Huile de machine légère.
• Souder.
• ruban adhésif double face....
Achetez, imprimez et préparez les pièces.
Ce modèle utilise les pièces imprimées non 3D suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
• Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 150 tr / min.
• Un micro-commutateur (Uxcell A12013100UX0116 Bouton haut 3P 2 Position 1P2T SPDT VERTICAL • Interrupteur de diapositive, 0,5 ampère, 50v DC, 50 pièces, 3 mm).
Vous pouvez également avoir besoin d'un chargeur de batterie approprié.
Pour les pièces imprimées 3D, j'ai inclus le fichier "Pièces imprimées 3D.pdf" contenant les noms, comptage, hauteur de calque, remplissage et paramètres de support pour les pièces 3D que j'ai imprimées. "Ghost.3mf" est le fantôme à double extrusion, et "Ghost.stl" est le fantôme d'extrusion unique, vous n'avez besoin que de l'un ou de l'autre.
Il s'agit d'un modèle d'impression et d'assemblage de haute précision utilisant parfois de très petites pièces et dans des espaces très serrés. Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le modèle utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
J'ai utilisé de l'huile de machine légère pour la lubrification des engrenages et des essieux.
Câblez le moteur fantôme et l'interrupteur marche / arrêt
Pour câbler le moteur fantôme et l'interrupteur marche / arrêt, j'ai effectué les étapes suivantes:
• Coupez les fils sur le connecteur JST à 40 mm de longueur, puis dépouillé et étagère les extrémités.
• Souder le fil noir du connecteur JST au moteur "-" Terminal.
• Souder le fil rouge du connecteur JST à l'une des bornes de commutation extérieure.
• Souder la borne du commutateur central au terminal "+" du moteur.
Après le câblage, j'ai connecté le connecteur JST à la batterie et utilisé l'interrupteur pour allumer et désactiver le moteur.
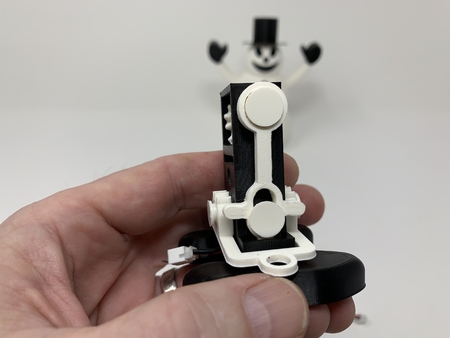
Assemblez la base.
https://youtu.be/kvgp_8ibvic
Pour assembler la base, j'ai effectué les étapes suivantes:
• Appuyez sur le moteur d'engrenage dans "Base.stl" de sorte que l'arbre du moteur était à 3 mm au-dessus de la plaque de vitesse du moteur.
• Appuyez sur "Gear, Crown, Motor.stl" sur l'arbre du moteur.
• Slid "Mount, Ghost.stl" Down de l'assemblage de base supérieur et fixé en place avec deux "essieu, body.stl".
• Appuyez sur un "cam.stl" sur l'arbre hexagonal court sur "axle.stl".
• Positionné "Gear, couronne, essieu.stl" À l'intérieur de l'assemblage de base sur le trou d'essieu plus petit.
• Gliez l'arbre hexagonal plus long de l'assemblage de la came et de l'essieu dans le trou d'essieu plus grand de l'ensemble de base.
• Appuyez sur l'arbre d'essieu hexagonal plus long à travers l'équipement de l'essieu et sortiz le plus petit trou d'essieu dans l'ensemble de base.
• Affait le train de vitesses de telle sorte que la came était à sa position la plus supérieure.
• Appuyé sur la "came" restante sur l'extrémité de l'arbre hexagonal long de l'ensemble de l'essieu de telle sorte que la came était à sa position la plus inférieure (180 degrés de la première came).
• Glissa une "jambe" dans l'assemblage de base et positionné l'anneau de came sur la came et fixé en place avec un "essieu, jambe".
• Gliez la "jambe" restante "dans l'assemblage de base et positionné l'anneau de came sur la came et fixé en place avec le" essieu, leg.stl "restant.
• Affaire le train de vitesse jusqu'à ce que les épingles de jambe soient de niveau (une came simple en avant, restant directement vers l'arrière).
• Positionné "Seesaw.stl" sur le trou fileté supérieur sur l'assemblage de la base et fixé en place avec "essieu, voie.
• fixé la batterie à l'arrière de l'ensemble de base avec du ruban adhésif doublé.
À ce stade, j'ai connecté le moteur à une alimentation afin de tester l'assemblage. J'ai lubrifié et exploité l'assemblage et noté que la consommation d'énergie soit de 18 à 20mA. Une fois terminé, j'ai connecté la batterie au moteur à l'aide des connecteurs JST.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• fixé l'interrupteur à l'intérieur du pied à l'aide d'un petit point de colle cyanoacrylate ou d'une petite bande de ruban adhésif double face.
• glissé "Ghost.3mf" (ou "Ghost.stl") vers le bas du haut de l'assemblage de base jusqu'à ce que en contact le montage du corps, alignent les trous de montage fantôme avec les trous de montage corporel, puis sécurisé le fantôme à la monture corporelle en utilisant deux "Bolt, fantôme.stl".
• Double vérifié que le câblage n'interférait pas avec les composants en mouvement.
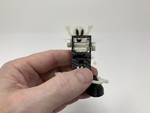
Et c'est ainsi que j'ai imprimé et assemblé le robot Ultimaker "Pin Walker".
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Un marcheur d'épingle à thème d'Halloween.Avec Halloween à seulement quelques semaines, et l'un de nos petits-fils sur le point de passer un autr...e samedi soir à notre maison (il est tellement sorti de Halloween que quand ici, il porte l'un des nombreux costumes d'Halloween, sa grand-mère, alias, ma femme, a acheté pour lui pour lui ), J'ai conçu ce "Halloween Happy Ghost Pin Walker", qui est basé sur ma précédente plate-forme de marcheur, pour compléter son costume fantôme.
J'ai conçu à la fois un fantôme Happy Ghost à deux et à extrusion, et Cura 4.2 a indiqué que le fantôme à double extrusion nécessiterait environ 3 heures à l'impression 3D, et les parties restantes, sont devenues un "imprimé de nuit" du vendredi soir. Quelques minutes de nettoyage, de soudure et d'assemblage samedi matin, et "Halloween Happy Ghost Pin Walker" était prêt pour l'arrivée de nos petits-fils.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide d'Autodesk Fusion 360, tranché à l'aide de Cura 4.2, et imprimé dans PLA sur un ultimaker 2+ étendu et un ultimaker 3 étendu.
Une dernière note, je ne reçois aucune compensation sous quelque forme que ce soit pour la conception, les pièces et / ou les matériaux utilisés dans ce modèle.
Paramètres d'impression du modèle 3D
Fournitures que j'ai utilisées.J'ai utilisé les fournitures suivantes:
• Huile de machine légère.
• Souder.
• ruban adhésif double face....
Achetez, imprimez et préparez les pièces.
Ce modèle utilise les pièces imprimées non 3D suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
• Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 150 tr / min.
• Un micro-commutateur (Uxcell A12013100UX0116 Bouton haut 3P 2 Position 1P2T SPDT VERTICAL • Interrupteur de diapositive, 0,5 ampère, 50v DC, 50 pièces, 3 mm).
Vous pouvez également avoir besoin d'un chargeur de batterie approprié.
Pour les pièces imprimées 3D, j'ai inclus le fichier "Pièces imprimées 3D.pdf" contenant les noms, comptage, hauteur de calque, remplissage et paramètres de support pour les pièces 3D que j'ai imprimées. "Ghost.3mf" est le fantôme à double extrusion, et "Ghost.stl" est le fantôme d'extrusion unique, vous n'avez besoin que de l'un ou de l'autre.
Il s'agit d'un modèle d'impression et d'assemblage de haute précision utilisant parfois de très petites pièces et dans des espaces très serrés. Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le modèle utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
J'ai utilisé de l'huile de machine légère pour la lubrification des engrenages et des essieux.
Câblez le moteur fantôme et l'interrupteur marche / arrêt
Pour câbler le moteur fantôme et l'interrupteur marche / arrêt, j'ai effectué les étapes suivantes:
• Coupez les fils sur le connecteur JST à 40 mm de longueur, puis dépouillé et étagère les extrémités.
• Souder le fil noir du connecteur JST au moteur "-" Terminal.
• Souder le fil rouge du connecteur JST à l'une des bornes de commutation extérieure.
• Souder la borne du commutateur central au terminal "+" du moteur.
Après le câblage, j'ai connecté le connecteur JST à la batterie et utilisé l'interrupteur pour allumer et désactiver le moteur.
Assemblez la base.
https://youtu.be/kvgp_8ibvic
Pour assembler la base, j'ai effectué les étapes suivantes:
• Appuyez sur le moteur d'engrenage dans "Base.stl" de sorte que l'arbre du moteur était à 3 mm au-dessus de la plaque de vitesse du moteur.
• Appuyez sur "Gear, Crown, Motor.stl" sur l'arbre du moteur.
• Slid "Mount, Ghost.stl" Down de l'assemblage de base supérieur et fixé en place avec deux "essieu, body.stl".
• Appuyez sur un "cam.stl" sur l'arbre hexagonal court sur "axle.stl".
• Positionné "Gear, couronne, essieu.stl" À l'intérieur de l'assemblage de base sur le trou d'essieu plus petit.
• Gliez l'arbre hexagonal plus long de l'assemblage de la came et de l'essieu dans le trou d'essieu plus grand de l'ensemble de base.
• Appuyez sur l'arbre d'essieu hexagonal plus long à travers l'équipement de l'essieu et sortiz le plus petit trou d'essieu dans l'ensemble de base.
• Affait le train de vitesses de telle sorte que la came était à sa position la plus supérieure.
• Appuyé sur la "came" restante sur l'extrémité de l'arbre hexagonal long de l'ensemble de l'essieu de telle sorte que la came était à sa position la plus inférieure (180 degrés de la première came).
• Glissa une "jambe" dans l'assemblage de base et positionné l'anneau de came sur la came et fixé en place avec un "essieu, jambe".
• Gliez la "jambe" restante "dans l'assemblage de base et positionné l'anneau de came sur la came et fixé en place avec le" essieu, leg.stl "restant.
• Affaire le train de vitesse jusqu'à ce que les épingles de jambe soient de niveau (une came simple en avant, restant directement vers l'arrière).
• Positionné "Seesaw.stl" sur le trou fileté supérieur sur l'assemblage de la base et fixé en place avec "essieu, voie.
• fixé la batterie à l'arrière de l'ensemble de base avec du ruban adhésif doublé.
À ce stade, j'ai connecté le moteur à une alimentation afin de tester l'assemblage. J'ai lubrifié et exploité l'assemblage et noté que la consommation d'énergie soit de 18 à 20mA. Une fois terminé, j'ai connecté la batterie au moteur à l'aide des connecteurs JST.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• fixé l'interrupteur à l'intérieur du pied à l'aide d'un petit point de colle cyanoacrylate ou d'une petite bande de ruban adhésif double face.
• glissé "Ghost.3mf" (ou "Ghost.stl") vers le bas du haut de l'assemblage de base jusqu'à ce que en contact le montage du corps, alignent les trous de montage fantôme avec les trous de montage corporel, puis sécurisé le fantôme à la monture corporelle en utilisant deux "Bolt, fantôme.stl".
• Double vérifié que le câblage n'interférait pas avec les composants en mouvement.
Et c'est ainsi que j'ai imprimé et assemblé le robot Ultimaker "Pin Walker".
J'espère que vous l'avez apprécié!