Le "kid calamari". 3d pour imprimer




3958 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
https://youtu.be/-mzhixwd5q4
Ne faites jamais confiance à un calamari capé ...
Le "Cala...mari Kid" est le troisième d'une série d'automates sur le thème de "Illusion" que j'ai conçus. Avec une presse de la Calamari Kid Coin ("CK"), le modèle effectue une illusion sur le thème du "jeu de shell".
Inspiré par l'automate sur le thème du jeu à main "suédois à main" . En dessinant une moyenne de 9 mA de courant (14 mm maximum, minimum 7), le mécanisme convient facilement à un fonctionnement à énergie solaire.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.6.1 et 3D imprimé dans PLA sur un ultimaker 2+ étendu, un ultimaker 3 étendu et un ultimaker s5.
J'ai acquis les parties suivantes pour ce mécanisme:
• Un moteur d'engrenage N20 6VDC 30RPM (en ligne).
• Deux aimants de néodyme de ...6 mm (diamètre) par 1,5 mm (épaisseur) (magasin de passe-temps local).
• Trois aimants en néodyme de 3 mm (diamètre) par 1,5 mm (épaisseur) (magasin de passe-temps local).
• porte-batterie 6VDC AAA (en ligne).
• Quatre batteries AAA (ma réserve de batterie).
• Vis de six m2,5 par 16 mm (boutique de loisirs locaux).
• Six noix M2.5 (boutique de loisirs locaux).
• Trois commutateurs de levier à rouleaux micro (Cyt1096).
• Trois roulements à billes de 8 mm (5/16 ").
Le fichier joint "Parties.pdf" contient le nom, la quantité, la hauteur de la couche et le remplissage de toutes les pièces imprimées 3D que j'ai imprimées pour ce mécanisme. Notez que "Barrel.3MF", "Button.3MF", "Octopus, Head.3MF" et "Stein.3MF" sont des pièces d'extrusion à double.
Ce mécanisme est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées de très petite précision 3D dans des espaces confinés avec un alignement très précis. J'ai imprimé les engrenages, les leviers, les bras, les caméras et les roues en utilisant le «profil d'ingénierie» Ultimaker Cura 4.6.1 sur mon Ultimaker S5, ce qui fournit une tolérance très précise nécessitant un minimum de réglage, de dépôt, de forage ou de ponçage. Cependant, avant l'assemblage, je teste toujours ajusté et taillé, classé, foré, poncé, etc. Toutes les pièces nécessaires au besoin pour le mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon vos paramètres de trancheuse, imprimante, imprimantes et les couleurs que vous avez choisies, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires pour recréer avec succès ce modèle. J'ai soigneusement déposé tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses en utilisant de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce mécanisme utilise également un ensemble fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1, 8 mm par 1,25) si nécessaire pour le nettoyage du fil.
Assemblez la table.
Pour assembler la table, j'ai effectué les étapes suivantes:
• Attaché un interrupteur de levier à rouleau sur le support "", commutateur.stl "en utilisant deux vis M2,5 par 16 mm et deux écrous M2,5.
• bouton glissé "3 mf" dans le trou du bouton dans "table.stl".
• Attaché l'ensemble du support de commutateur à l'ensemble de table à l'aide de "Boulon (8 mm par 30 mm) .stl".
• ajusté l'interrupteur de telle sorte que le bouton était plein lorsqu'il était libéré et a activé l'interrupteur de levier de rouleau lorsqu'il est enfoncé.
• Souder deux longueurs de 10 mm de fil blanc sur l'interrupteur de levier à rouleau, un à la broche commune (C) et le reste à la broche normalement ouverte (non).
• Appuyez sur deux aimants de 6 mm dans le trou dans "Holder, Magnet.stl".
• Gliez l'ensemble du porte-aimant dans la fente de l'assemblage de la table.
Assemblez la base.
Pour assembler la base, j'ai effectué les étapes suivantes:
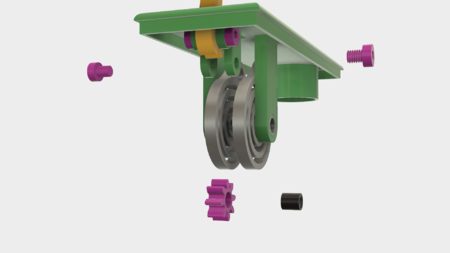
• Positionné "Équipement, composé (1m 28T, 1,867m 28T) .stl" Entre les tours d'entraînement orientées comme indiqué, puis a fixé l'engrenage en place à l'aide de "Drive.stl" et "essieu, drive.stl" de telle Le lecteur était orienté comme indiqué lorsqu'il est complètement serré (si la broche n'est pas dans la position indiquée, retirez l'essieu, tournez-la de 60 degrés, puis répétez jusqu'à ce qu'elle le fasse.).
• Secure "broche, essieu, engrenage, composé (1m 56T, 1,867m 17)" dans le trou fileté dans "essieu, équipement, composé (1m 56T, 1,867m 17) .stl".
• Positionné "Équipement, composé (1M 56T, 1,867m 17T) .Stl" sur la base en position et orientation comme indiqué puis fixé en place avec "essieu, équipement, composé (1m 56T, 1,867m 17) .stl" et "Écrou, 20mm.stl".
• sécurisé "Pin, essieu, engrenage (1m 14T) .stl" dans le trou fileté dans "essieu, engrenage (1m 14T) .stl".
• Positionné "Engrenage (1m 14T) .Stl" sur la base en position et orientation comme indiqué le sécurisé en place avec "essieu, équipement (1m 14T) .stl" et "écrou, 20mm.stl".
• sécurisé "Driven.stl" sur l'assemblage de base à l'aide de "essieu, entraînement.stl", s'assurer que la roue entraînée s'aligne sur la roue d'entraînement.
• Positionné la broche courte sur "ARM.STL" dans la fente en entraînement, glissa le bras autour de la fente de telle sorte que le trou fileté aligne avec le trou d'essieu dans l'ensemble de base, puis a fixé le bras sur l'ensemble de base en utilisant "l'essieu, Arm.stl ".
• Attaché un interrupteur de levier à rouleau à la tour la plus proche de la roue entraînée en utilisant deux vis M2,5 par 16 mm et des écrous M2,5.
• Affaire l'équipement composé ("Gear, composé (1m 28T, 1,867m 28T) .Stl") dans le sens des aiguilles d'une montre comme vu de l'avant de l'assemblage et ajusté le microswitch de roue entraîné pour "cliquer" lors de la rencontre des épingles d'arrêt sur la roue entraînée .
• Attaché l'interrupteur de levier restant à la tour la plus proche de la roue d'entraînement à l'aide de deux vis M2,5 par 16 mm et des écrous M2.5.
• Tourné de l'équipement composé ("Gear, composé (1m 28T, 1,867m 28T) .Stl") dans le sens des aiguilles d'une montre comme vu de l'avant de l'assemblage et ajusté le micro-interrogation de la roue d'entraînement pour "cliquer" lors de la rencontre de l'emplacement d'arrêt de la roue d'entraînement .
• Appuyez sur "Gear, Motor.stl" sur l'arbre du moteur de vitesse.
• Appuyez sur l'ensemble du moteur dans les trous de montage du moteur "Base.stl" juste assez loin pour permettre l'accès aux bornes du moteur.
• Souder un fil bleu entre le microswitch de roue entraîné commun (c) Pin à la broche commune de la roue d'entraînement (C).
• Souder un fil bleu entre le microswitch de roue entraîné normalement fermé (NC) à la broche de roue d'entraînement à la broche ouverte (non) normalement ouverte.
• Souder le fil rouge du support de batterie au moteur "-" Terminal (requis pour que le moteur tourne dans le sens antihoraire comme vu de l'extrémité de l'arbre du moteur du moteur).
• Souder un fil entre le microswitch de la roue d'entraînement ouverte normalement (non) la borne à la borne "+" du moteur (requise pour que le moteur tourne dans le sens antihoraire comme vu de l'extrémité de l'arbre du moteur du moteur).
• Souder le fil noir du support de batterie au borne de microswitch roué de conduite (C).
• Souder le fil blanc du tableau Microswitch Common (C) Terminal à la borne commune de la roue d'entraînement (C).
• Souder le fil blanc de la borne ouverte (non) d'ouverture (non) du microswitch de roue d'entraînement normalement ouverte (non).
• Appuyez sur le moteur plus loin dans le support de moteur en engageant le matériel de moteur avec l'équipement composé ("Gear, composé (1M 28T, 1,867m 28T) .stl").
• Positionné en haut sur la base, placé la longue broche sur "ARM.stl" dans la fente dans "Yoke.stl", puis a fixé l'ensemble supérieur à l'ensemble de base en utilisant quatre "boulon (m6 par 4 mm) .stl".
Assemblez le support.
Pour assembler le support, j'ai effectué les étapes suivantes:
• Slid "Yoke.stl" dans "Bracket.stl".
• Positionné "Engrenage (1M 56T) .Stl" dans le support comme indiqué et fixé en place avec "essieu, équipement (1m 56T), assurant que le joug et le matériel sont centrés.
• Attaché "mont, Octopus.stl" à l'ensemble du support à l'aide de "écrou, 17mm.stl".
• Attaché l'assemblage des tentacules à l'ensemble du support à l'aide de deux "essieu, montage, tentacles.stl".
• Attaché les deux "Octopus, tête, œil.stl" à "Octopus, tête.3mf" en utilisant une colle cyanoacrylate épaisse.
• Attaché "cape.stl" à l'ensemble de tête de poulpe à l'aide de ruban adhésif double face.
• Attaché l'assemblage de la tête de poulpe à l'assemblage des tentacules à l'aide du ruban adhésif double face.
• Slid "bras, lift.stl" dans l'assemblage.
• Appuyez sur un aimant de 3 mm dans le haut de chaque "tasse.stl" en polarité identique comme le porte-aimant.
• Collé les trois tasses dans "Octopus, tentacules.stl" en utilisant de la colle cyanoacrylate épaisse.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• Fixez l'ensemble du support à l'ensemble de base à l'aide de deux "boulon (m8 par 12) .stl" s'assurer que les épingles sur les essieux s'alignent avec les fentes dans le joug et le bras de soulèvement.
• Attaché "Growler.stl" et "Stein.3MF" au dessus de la table à l'aide de ruban adhésif double face.
• Positionné les trois roulements à billes dans les tasses.
• Attaché le support de batterie à la base à l'aide du ruban adhésif double face.
• Gliez le "baril.stl" dans l'assemblage de base et fixé en place avec quatre "boulon (m6 par 4 mm) .stl".
Et c'est ainsi que j'ai imprimé et assemblé le "Kid Calamari".
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Une automate sur le thème de l'illusion imprimée en 3D.https://youtu.be/-mzhixwd5q4
Ne faites jamais confiance à un calamari capé ...
Le "Cala...mari Kid" est le troisième d'une série d'automates sur le thème de "Illusion" que j'ai conçus. Avec une presse de la Calamari Kid Coin ("CK"), le modèle effectue une illusion sur le thème du "jeu de shell".
Inspiré par l'automate sur le thème du jeu à main "suédois à main" . En dessinant une moyenne de 9 mA de courant (14 mm maximum, minimum 7), le mécanisme convient facilement à un fonctionnement à énergie solaire.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.6.1 et 3D imprimé dans PLA sur un ultimaker 2+ étendu, un ultimaker 3 étendu et un ultimaker s5.
Paramètres d'impression du modèle 3D
Parties.J'ai acquis les parties suivantes pour ce mécanisme:
• Un moteur d'engrenage N20 6VDC 30RPM (en ligne).
• Deux aimants de néodyme de ...6 mm (diamètre) par 1,5 mm (épaisseur) (magasin de passe-temps local).
• Trois aimants en néodyme de 3 mm (diamètre) par 1,5 mm (épaisseur) (magasin de passe-temps local).
• porte-batterie 6VDC AAA (en ligne).
• Quatre batteries AAA (ma réserve de batterie).
• Vis de six m2,5 par 16 mm (boutique de loisirs locaux).
• Six noix M2.5 (boutique de loisirs locaux).
• Trois commutateurs de levier à rouleaux micro (Cyt1096).
• Trois roulements à billes de 8 mm (5/16 ").
Le fichier joint "Parties.pdf" contient le nom, la quantité, la hauteur de la couche et le remplissage de toutes les pièces imprimées 3D que j'ai imprimées pour ce mécanisme. Notez que "Barrel.3MF", "Button.3MF", "Octopus, Head.3MF" et "Stein.3MF" sont des pièces d'extrusion à double.
Ce mécanisme est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées de très petite précision 3D dans des espaces confinés avec un alignement très précis. J'ai imprimé les engrenages, les leviers, les bras, les caméras et les roues en utilisant le «profil d'ingénierie» Ultimaker Cura 4.6.1 sur mon Ultimaker S5, ce qui fournit une tolérance très précise nécessitant un minimum de réglage, de dépôt, de forage ou de ponçage. Cependant, avant l'assemblage, je teste toujours ajusté et taillé, classé, foré, poncé, etc. Toutes les pièces nécessaires au besoin pour le mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon vos paramètres de trancheuse, imprimante, imprimantes et les couleurs que vous avez choisies, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires pour recréer avec succès ce modèle. J'ai soigneusement déposé tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses en utilisant de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce mécanisme utilise également un ensemble fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1, 8 mm par 1,25) si nécessaire pour le nettoyage du fil.
Assemblez la table.
Pour assembler la table, j'ai effectué les étapes suivantes:
• Attaché un interrupteur de levier à rouleau sur le support "", commutateur.stl "en utilisant deux vis M2,5 par 16 mm et deux écrous M2,5.
• bouton glissé "3 mf" dans le trou du bouton dans "table.stl".
• Attaché l'ensemble du support de commutateur à l'ensemble de table à l'aide de "Boulon (8 mm par 30 mm) .stl".
• ajusté l'interrupteur de telle sorte que le bouton était plein lorsqu'il était libéré et a activé l'interrupteur de levier de rouleau lorsqu'il est enfoncé.
• Souder deux longueurs de 10 mm de fil blanc sur l'interrupteur de levier à rouleau, un à la broche commune (C) et le reste à la broche normalement ouverte (non).
• Appuyez sur deux aimants de 6 mm dans le trou dans "Holder, Magnet.stl".
• Gliez l'ensemble du porte-aimant dans la fente de l'assemblage de la table.
Assemblez la base.
Pour assembler la base, j'ai effectué les étapes suivantes:
• Positionné "Équipement, composé (1m 28T, 1,867m 28T) .stl" Entre les tours d'entraînement orientées comme indiqué, puis a fixé l'engrenage en place à l'aide de "Drive.stl" et "essieu, drive.stl" de telle Le lecteur était orienté comme indiqué lorsqu'il est complètement serré (si la broche n'est pas dans la position indiquée, retirez l'essieu, tournez-la de 60 degrés, puis répétez jusqu'à ce qu'elle le fasse.).
• Secure "broche, essieu, engrenage, composé (1m 56T, 1,867m 17)" dans le trou fileté dans "essieu, équipement, composé (1m 56T, 1,867m 17) .stl".
• Positionné "Équipement, composé (1M 56T, 1,867m 17T) .Stl" sur la base en position et orientation comme indiqué puis fixé en place avec "essieu, équipement, composé (1m 56T, 1,867m 17) .stl" et "Écrou, 20mm.stl".
• sécurisé "Pin, essieu, engrenage (1m 14T) .stl" dans le trou fileté dans "essieu, engrenage (1m 14T) .stl".
• Positionné "Engrenage (1m 14T) .Stl" sur la base en position et orientation comme indiqué le sécurisé en place avec "essieu, équipement (1m 14T) .stl" et "écrou, 20mm.stl".
• sécurisé "Driven.stl" sur l'assemblage de base à l'aide de "essieu, entraînement.stl", s'assurer que la roue entraînée s'aligne sur la roue d'entraînement.
• Positionné la broche courte sur "ARM.STL" dans la fente en entraînement, glissa le bras autour de la fente de telle sorte que le trou fileté aligne avec le trou d'essieu dans l'ensemble de base, puis a fixé le bras sur l'ensemble de base en utilisant "l'essieu, Arm.stl ".
• Attaché un interrupteur de levier à rouleau à la tour la plus proche de la roue entraînée en utilisant deux vis M2,5 par 16 mm et des écrous M2,5.
• Affaire l'équipement composé ("Gear, composé (1m 28T, 1,867m 28T) .Stl") dans le sens des aiguilles d'une montre comme vu de l'avant de l'assemblage et ajusté le microswitch de roue entraîné pour "cliquer" lors de la rencontre des épingles d'arrêt sur la roue entraînée .
• Attaché l'interrupteur de levier restant à la tour la plus proche de la roue d'entraînement à l'aide de deux vis M2,5 par 16 mm et des écrous M2.5.
• Tourné de l'équipement composé ("Gear, composé (1m 28T, 1,867m 28T) .Stl") dans le sens des aiguilles d'une montre comme vu de l'avant de l'assemblage et ajusté le micro-interrogation de la roue d'entraînement pour "cliquer" lors de la rencontre de l'emplacement d'arrêt de la roue d'entraînement .
• Appuyez sur "Gear, Motor.stl" sur l'arbre du moteur de vitesse.
• Appuyez sur l'ensemble du moteur dans les trous de montage du moteur "Base.stl" juste assez loin pour permettre l'accès aux bornes du moteur.
• Souder un fil bleu entre le microswitch de roue entraîné commun (c) Pin à la broche commune de la roue d'entraînement (C).
• Souder un fil bleu entre le microswitch de roue entraîné normalement fermé (NC) à la broche de roue d'entraînement à la broche ouverte (non) normalement ouverte.
• Souder le fil rouge du support de batterie au moteur "-" Terminal (requis pour que le moteur tourne dans le sens antihoraire comme vu de l'extrémité de l'arbre du moteur du moteur).
• Souder un fil entre le microswitch de la roue d'entraînement ouverte normalement (non) la borne à la borne "+" du moteur (requise pour que le moteur tourne dans le sens antihoraire comme vu de l'extrémité de l'arbre du moteur du moteur).
• Souder le fil noir du support de batterie au borne de microswitch roué de conduite (C).
• Souder le fil blanc du tableau Microswitch Common (C) Terminal à la borne commune de la roue d'entraînement (C).
• Souder le fil blanc de la borne ouverte (non) d'ouverture (non) du microswitch de roue d'entraînement normalement ouverte (non).
• Appuyez sur le moteur plus loin dans le support de moteur en engageant le matériel de moteur avec l'équipement composé ("Gear, composé (1M 28T, 1,867m 28T) .stl").
• Positionné en haut sur la base, placé la longue broche sur "ARM.stl" dans la fente dans "Yoke.stl", puis a fixé l'ensemble supérieur à l'ensemble de base en utilisant quatre "boulon (m6 par 4 mm) .stl".
Assemblez le support.
Pour assembler le support, j'ai effectué les étapes suivantes:
• Slid "Yoke.stl" dans "Bracket.stl".
• Positionné "Engrenage (1M 56T) .Stl" dans le support comme indiqué et fixé en place avec "essieu, équipement (1m 56T), assurant que le joug et le matériel sont centrés.
• Attaché "mont, Octopus.stl" à l'ensemble du support à l'aide de "écrou, 17mm.stl".
• Attaché l'assemblage des tentacules à l'ensemble du support à l'aide de deux "essieu, montage, tentacles.stl".
• Attaché les deux "Octopus, tête, œil.stl" à "Octopus, tête.3mf" en utilisant une colle cyanoacrylate épaisse.
• Attaché "cape.stl" à l'ensemble de tête de poulpe à l'aide de ruban adhésif double face.
• Attaché l'assemblage de la tête de poulpe à l'assemblage des tentacules à l'aide du ruban adhésif double face.
• Slid "bras, lift.stl" dans l'assemblage.
• Appuyez sur un aimant de 3 mm dans le haut de chaque "tasse.stl" en polarité identique comme le porte-aimant.
• Collé les trois tasses dans "Octopus, tentacules.stl" en utilisant de la colle cyanoacrylate épaisse.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• Fixez l'ensemble du support à l'ensemble de base à l'aide de deux "boulon (m8 par 12) .stl" s'assurer que les épingles sur les essieux s'alignent avec les fentes dans le joug et le bras de soulèvement.
• Attaché "Growler.stl" et "Stein.3MF" au dessus de la table à l'aide de ruban adhésif double face.
• Positionné les trois roulements à billes dans les tasses.
• Attaché le support de batterie à la base à l'aide du ruban adhésif double face.
• Gliez le "baril.stl" dans l'assemblage de base et fixé en place avec quatre "boulon (m6 par 4 mm) .stl".
Et c'est ainsi que j'ai imprimé et assemblé le "Kid Calamari".
J'espère que vous l'avez apprécié!