Réfrigérateur 3d pour imprimer



7839 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
https://youtu.be/izraztj-se8
https://youtu.be/sdljh3ficna...
Quoi qu'il... en soit, les petits-enfants en sont fascinés!
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide de Freecad, tranché en utilisant Ultimaker Cura 4.7.0 et 3D imprimé en PLA sur Ultimaker S5S.
Parties.
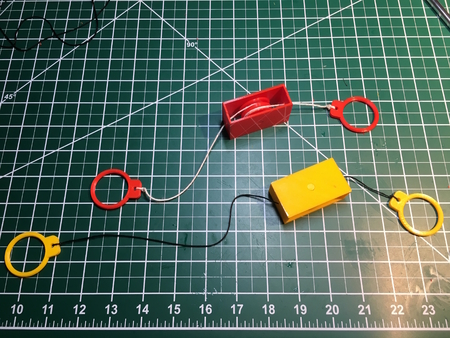
J'ai acquis les parties suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570) et un chargeur.
• Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 100 tr / min (en ligne).
• Quatre aimants de néodyme de 8 mm (diamètre) par 3 mm (d'épaisseur).
I 3D a imprimé les pièces suivantes à une hauteur de couche de 0,15 mm, 20% de remplissage:
• Six "arm.stl".
• Deux "essieu, montage magnétique.stl"
• quatre "essieu, côté.stl".
• Trois "axle.stl".
• un "base.stl".
• Six "boulon, axle.stl".
• Un "équipement, axle.stl".
• Un "équipement, moteur.stl".
• Deux "Aimon Mount.stl".
• Deux "côté, Sawtooth.stl".
Avant l'assemblage, je teste l'ajustement et le taillage, le dépôt, le percé, le poncé, etc. Toutes les pièces si nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non déplacées. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses.
J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le mécanisme utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
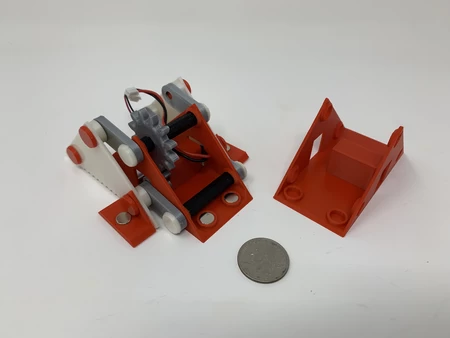
Assemblée.
Pour assembler le mécanisme, j'ai effectué les étapes suivantes:
• Positionné "Gear, Motor.stl" dans "base.stl", puis appuyé sur le moteur dans la base et l'engrenage.
• Appuyez sur "Gear, axle.stl" sur l'un de "Axle.stl".
• Souder le connecteur JST au moteur de telle sorte que l'essieu du moteur tournait dans le sens antihoraire lorsqu'il est vu depuis l'extrémité de l'essieu du moteur.
• Appuyez sur deux aimants néodymiques dans les poches d'aimant dans l'assemblage de base.
• Positionné l'ensemble de l'essieu dans l'ensemble de base, puis fixé en place avec deux "ARM.stl" et deux "boulon, axe.stl".
• Positionné le deuxième essieu dans l'ensemble de base puis fixé en place avec deux "ARM.STL" et deux "Bolt.stl".
• Positionné le troisième essieu dans l'assemblage de base puis fixé en place avec deux "arm.stl" et deux "boulon.stl".
• Attaché un "Montant Animt.stl" à un seul "côté, Sawtooth.stl" en utilisant un petit point de colle cyanoacrylate, en s'assurant que le trou d'essieu sur le support magnétique aligné avec le trou d'essieu dans le côté, puis a appuyé sur un aimant en néodyme dans de La poche de l'aimant de la monture aimant.
• Répétez l'étape précédente pour le support et le côté de l'aimant restant.
• Attaché d'un ensemble latéral aux bras d'assemblage de base d'un côté en utilisant deux "essieu, côté.stl" et un "essieu, montage magnétique.stl".
• Répété l'étape précédente pour l'assemblage latéral restant.
• fixé la batterie à l'ensemble de base à l'aide du ruban adhésif double face.
Après l'assemblage, j'ai simplement branché le connecteur JST sur le connecteur de la batterie, placé le mécanisme sur le réfrigérateur, et il est monté!
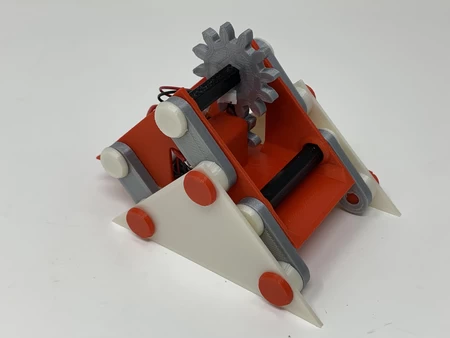
Et c'est ainsi que j'ai imprimé en 3D et assemblé "réfrigérateur rover".
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Un mécanisme d'escalade du réfrigérateur avant ferreux.https://youtu.be/izraztj-se8
https://youtu.be/sdljh3ficna...
Paramètres d'impression du modèle 3D
Obtient une nouvelle paire de chaussures (magnétiques)! Bon pour l'escalade des montagnes ferreuses (ou la plupart des réfrigérateurs)!Quoi qu'il... en soit, les petits-enfants en sont fascinés!
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu à l'aide de Freecad, tranché en utilisant Ultimaker Cura 4.7.0 et 3D imprimé en PLA sur Ultimaker S5S.
Parties.
J'ai acquis les parties suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570) et un chargeur.
• Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 100 tr / min (en ligne).
• Quatre aimants de néodyme de 8 mm (diamètre) par 3 mm (d'épaisseur).
I 3D a imprimé les pièces suivantes à une hauteur de couche de 0,15 mm, 20% de remplissage:
• Six "arm.stl".
• Deux "essieu, montage magnétique.stl"
• quatre "essieu, côté.stl".
• Trois "axle.stl".
• un "base.stl".
• Six "boulon, axle.stl".
• Un "équipement, axle.stl".
• Un "équipement, moteur.stl".
• Deux "Aimon Mount.stl".
• Deux "côté, Sawtooth.stl".
Avant l'assemblage, je teste l'ajustement et le taillage, le dépôt, le percé, le poncé, etc. Toutes les pièces si nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non déplacées. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses.
J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le mécanisme utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
Assemblée.
Pour assembler le mécanisme, j'ai effectué les étapes suivantes:
• Positionné "Gear, Motor.stl" dans "base.stl", puis appuyé sur le moteur dans la base et l'engrenage.
• Appuyez sur "Gear, axle.stl" sur l'un de "Axle.stl".
• Souder le connecteur JST au moteur de telle sorte que l'essieu du moteur tournait dans le sens antihoraire lorsqu'il est vu depuis l'extrémité de l'essieu du moteur.
• Appuyez sur deux aimants néodymiques dans les poches d'aimant dans l'assemblage de base.
• Positionné l'ensemble de l'essieu dans l'ensemble de base, puis fixé en place avec deux "ARM.stl" et deux "boulon, axe.stl".
• Positionné le deuxième essieu dans l'ensemble de base puis fixé en place avec deux "ARM.STL" et deux "Bolt.stl".
• Positionné le troisième essieu dans l'assemblage de base puis fixé en place avec deux "arm.stl" et deux "boulon.stl".
• Attaché un "Montant Animt.stl" à un seul "côté, Sawtooth.stl" en utilisant un petit point de colle cyanoacrylate, en s'assurant que le trou d'essieu sur le support magnétique aligné avec le trou d'essieu dans le côté, puis a appuyé sur un aimant en néodyme dans de La poche de l'aimant de la monture aimant.
• Répétez l'étape précédente pour le support et le côté de l'aimant restant.
• Attaché d'un ensemble latéral aux bras d'assemblage de base d'un côté en utilisant deux "essieu, côté.stl" et un "essieu, montage magnétique.stl".
• Répété l'étape précédente pour l'assemblage latéral restant.
• fixé la batterie à l'ensemble de base à l'aide du ruban adhésif double face.
Après l'assemblage, j'ai simplement branché le connecteur JST sur le connecteur de la batterie, placé le mécanisme sur le réfrigérateur, et il est monté!
Et c'est ainsi que j'ai imprimé en 3D et assemblé "réfrigérateur rover".
J'espère que vous l'avez apprécié!