Tri_max_gripper (gripper robotique conforme) 3d pour imprimer
















2673 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
Conçu par Chiprobot (http://www.thingiverse.com/chiprobot).
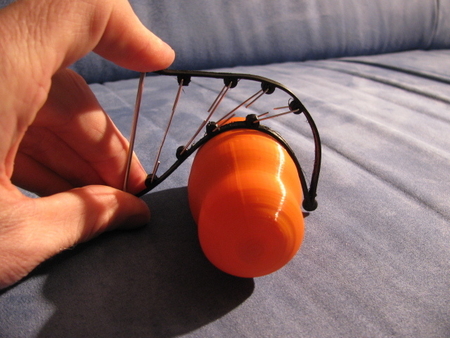
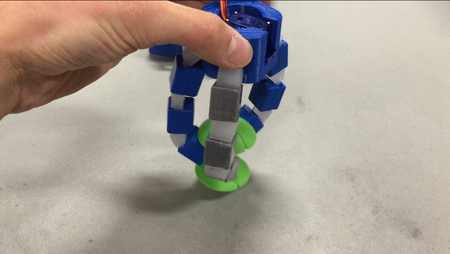
I...l s'agit d'une pince robotique qui ajuste sa poignée pour se conformer à la forme et à la forme de l'objet ramassé.
Mise à jour 2013/12/7: -
J'étais assez époustouflé par l'intérêt que cette pince a attiré
Et merci à tous pour les aimables messages.
Le Gripper a maintenant été présenté sur: -
http://hackaday.com/2013/12/03/compliant-robot-gripper-wont-scramble-your-eggs/
de build peut être trouvé sur ma page de robot ici: -http: //letsmakerobots.com/node/39387
Le mécanisme d'entraînement est un servo standard simple modifié avec un actionneur linéaire fabriqué à partir d'un «potentiomètre de colle de colle» et d'un potentiomètre de rétroaction linéaire.
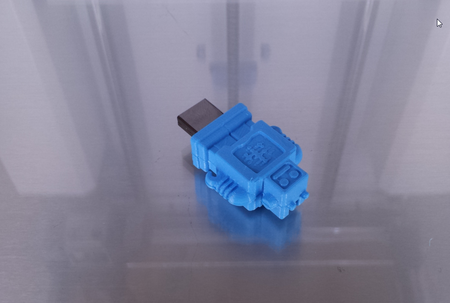
Des pièces imprimées simples avec PLA normal, les fichiers STL sont orientés pour l'impression sans support, vous devrez peut-être r...alentir l'imprimante tandis que la dernière partie des poutres de support est en cours d'impression.
Collez les trois poutres de support (rouges) au corps avant (bleu).
Ajouter du fil (fil de papier du papier) entre les œillets des trois bras.
Je vous recommande fortement de regarder les vidéos ci-dessus pour plus de détails sur la construction de l'actionneur.
Plus de détails de construction peuvent être vus ici: - http://letsmakerobots.com/node/31838?page=1
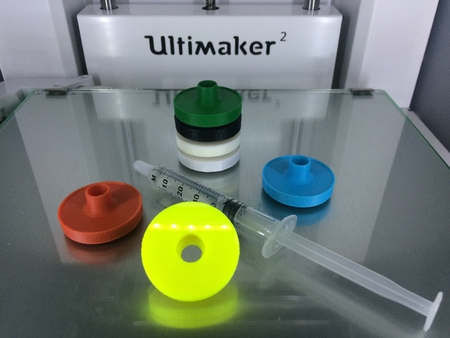
Montez dans le mécanisme de servomoteur linéaire (j'ai utilisé un bâton Pritt comme corps et un tube de brillant à lèvres comme piston (collez le piston insert à l'intérieur du tube de brillant à lèvres) et collez la couronne de piston (vert) vers le haut du tube à lèvres à lèvres ). Cela se fait de cette façon afin que vous puissiez affiner (glisser la couronne vers le haut / vers le bas) pour rassembler les extrémités de la pince pour donner max. poignée
Le servo est un HS-311 standard - lorsqu'il est converti en actionneur linéaire, il peut pousser 3 kg de force.
Designer
Erik de BruijnDescription du modèle 3D
Ceci est une pince robotique de Chiprobot, initialement publié le 1er décembre 2013.Conçu par Chiprobot (http://www.thingiverse.com/chiprobot).
I...l s'agit d'une pince robotique qui ajuste sa poignée pour se conformer à la forme et à la forme de l'objet ramassé.
Mise à jour 2013/12/7: -
J'étais assez époustouflé par l'intérêt que cette pince a attiré
Et merci à tous pour les aimables messages.
Le Gripper a maintenant été présenté sur: -
http://hackaday.com/2013/12/03/compliant-robot-gripper-wont-scramble-your-eggs/
de build peut être trouvé sur ma page de robot ici: -http: //letsmakerobots.com/node/39387
Le mécanisme d'entraînement est un servo standard simple modifié avec un actionneur linéaire fabriqué à partir d'un «potentiomètre de colle de colle» et d'un potentiomètre de rétroaction linéaire.
Paramètres d'impression du modèle 3D
InstructionsDes pièces imprimées simples avec PLA normal, les fichiers STL sont orientés pour l'impression sans support, vous devrez peut-être r...alentir l'imprimante tandis que la dernière partie des poutres de support est en cours d'impression.
Collez les trois poutres de support (rouges) au corps avant (bleu).
Ajouter du fil (fil de papier du papier) entre les œillets des trois bras.
Je vous recommande fortement de regarder les vidéos ci-dessus pour plus de détails sur la construction de l'actionneur.
Plus de détails de construction peuvent être vus ici: - http://letsmakerobots.com/node/31838?page=1
Montez dans le mécanisme de servomoteur linéaire (j'ai utilisé un bâton Pritt comme corps et un tube de brillant à lèvres comme piston (collez le piston insert à l'intérieur du tube de brillant à lèvres) et collez la couronne de piston (vert) vers le haut du tube à lèvres à lèvres ). Cela se fait de cette façon afin que vous puissiez affiner (glisser la couronne vers le haut / vers le bas) pour rassembler les extrémités de la pince pour donner max. poignée
Le servo est un HS-311 standard - lorsqu'il est converti en actionneur linéaire, il peut pousser 3 kg de force.













![Bridge d'amortisseur avant [Rhino reely]](https://www.3dforprint.com/modelos/4107/front-damper-bridge-reely-rhino1_medium.jpg)