Un mécanisme simple "marche" imprimé en 3d 3d pour imprimer


3568 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
https://youtu.be/q9p56ciyz_k
J'apprécie vraiment les mécanismes, donc lorsqu'une vidéo YouTube récente est apparue... dans mon flux vidéo suggéré YouTube d'une animation CAO d'un simple mécanisme de marche conçu par Thang010146:
https://youtu.be/1ht3nz4yggy
Je devais juste essayer de recréer son mécanisme pour l'impression 3D.
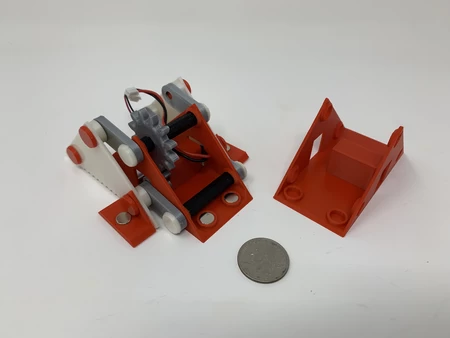
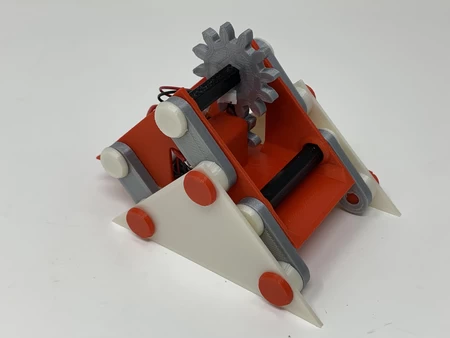
Le mécanisme de Thang01014 a été conçu pour être alimenté par des ressorts de torsion ou des élastiques, mais j'ai décidé de concevoir une version motorisée. Après un long après-midi de conception, d'impression 3D et d'assemblage, "un simple mécanisme de" marche "imprimé en 3D". était le résultat. Et comme indiqué dans sa vidéo, le mécanisme alimente en effet le terrain "rugueux" avec facilité.
Ma mise en œuvre de sa conception se compose de huit pièces imprimées 3D uniques (vingt-six pièces imprimées au total 3D car il existe de nombreux doublons), un moteur, une batterie et un connecteur de batterie.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.6.1 et 3D imprimé dans PLA sur un ultimaker 2+ étendu, un ultimaker 3 étendu et un ultimaker s5.
J'ai acquis les parties suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
• Un câble JST ...PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 150 tr / min (en ligne).
I 3D a imprimé les pièces suivantes à une hauteur de couche de 0,15 mm, 20% de remplissage:
• Six "arm.stl".
• Six "essieu, côté.stl".
• Trois "axle.stl".
• un "base.stl".
• Six "boulon, axle.stl".
• Un "équipement, axle.stl".
• Un "équipement, moteur.stl".
• deux "côté.stl".
Avant l'assemblage, le test d'ajustement et de garniture, de fichier, de foret, de sable, etc. Toutes les pièces nécessaires pour un mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le mécanisme utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
Assemblée.
Pour l'assemblage, j'ai effectué les étapes suivantes:
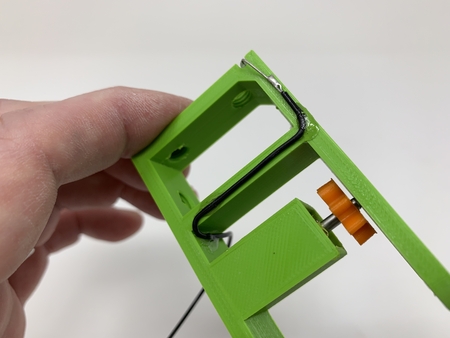
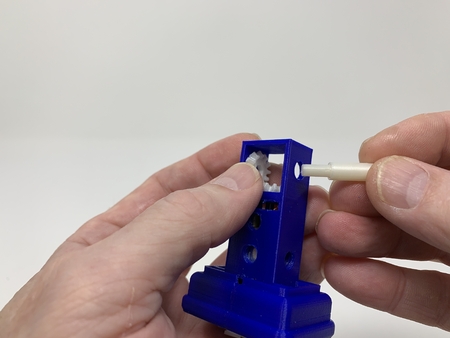
• Positionné "Gear, Motor.stl" dans "base.stl", puis appuyé sur le moteur dans la base et l'engrenage.
• Souder le connecteur JST au moteur.
• Appuyez sur "Gear, axle.stl" sur l'un de "Axle.stl".
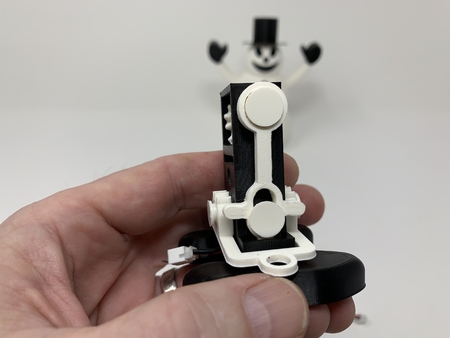
• Positionné l'ensemble de l'essieu dans l'ensemble de base, puis fixé en place avec deux "ARM.stl" et deux "boulon, axe.stl".
• Positionné le deuxième essieu dans l'ensemble de base puis fixé en place avec deux "ARM.STL" et deux "Bolt.stl".
• Positionné le troisième essieu dans l'assemblage de base puis fixé en place avec deux "arm.stl" et deux "boulon.stl".
• Attaché un "côté.stl" aux bras d'assemblage de base d'un côté en utilisant trois "essieu, côté.stl".
• Attaché le côté restant aux bras d'assemblage de base du côté restant à l'aide de trois "essieu, côté.stl".
• fixé la batterie à l'ensemble de base à l'aide du ruban adhésif double face.
• Après l'assemblage, j'ai simplement branché le connecteur JST sur la connexion de la batterie, et c'est parti!
Et c'est ainsi que j'ai imprimé et assemblé en 3D "un simple mécanisme" de marche "imprimé en 3D.
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Un simple mécanisme de marche.https://youtu.be/q9p56ciyz_k
J'apprécie vraiment les mécanismes, donc lorsqu'une vidéo YouTube récente est apparue... dans mon flux vidéo suggéré YouTube d'une animation CAO d'un simple mécanisme de marche conçu par Thang010146:
https://youtu.be/1ht3nz4yggy
Je devais juste essayer de recréer son mécanisme pour l'impression 3D.
Le mécanisme de Thang01014 a été conçu pour être alimenté par des ressorts de torsion ou des élastiques, mais j'ai décidé de concevoir une version motorisée. Après un long après-midi de conception, d'impression 3D et d'assemblage, "un simple mécanisme de" marche "imprimé en 3D". était le résultat. Et comme indiqué dans sa vidéo, le mécanisme alimente en effet le terrain "rugueux" avec facilité.
Ma mise en œuvre de sa conception se compose de huit pièces imprimées 3D uniques (vingt-six pièces imprimées au total 3D car il existe de nombreux doublons), un moteur, une batterie et un connecteur de batterie.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.6.1 et 3D imprimé dans PLA sur un ultimaker 2+ étendu, un ultimaker 3 étendu et un ultimaker s5.
Paramètres d'impression du modèle 3D
Parties.J'ai acquis les parties suivantes:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
• Un câble JST ...PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 150 tr / min (en ligne).
I 3D a imprimé les pièces suivantes à une hauteur de couche de 0,15 mm, 20% de remplissage:
• Six "arm.stl".
• Six "essieu, côté.stl".
• Trois "axle.stl".
• un "base.stl".
• Six "boulon, axle.stl".
• Un "équipement, axle.stl".
• Un "équipement, moteur.stl".
• deux "côté.stl".
Avant l'assemblage, le test d'ajustement et de garniture, de fichier, de foret, de sable, etc. Toutes les pièces nécessaires pour un mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt, le forage et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Le mécanisme utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
Assemblée.
Pour l'assemblage, j'ai effectué les étapes suivantes:
• Positionné "Gear, Motor.stl" dans "base.stl", puis appuyé sur le moteur dans la base et l'engrenage.
• Souder le connecteur JST au moteur.
• Appuyez sur "Gear, axle.stl" sur l'un de "Axle.stl".
• Positionné l'ensemble de l'essieu dans l'ensemble de base, puis fixé en place avec deux "ARM.stl" et deux "boulon, axe.stl".
• Positionné le deuxième essieu dans l'ensemble de base puis fixé en place avec deux "ARM.STL" et deux "Bolt.stl".
• Positionné le troisième essieu dans l'assemblage de base puis fixé en place avec deux "arm.stl" et deux "boulon.stl".
• Attaché un "côté.stl" aux bras d'assemblage de base d'un côté en utilisant trois "essieu, côté.stl".
• Attaché le côté restant aux bras d'assemblage de base du côté restant à l'aide de trois "essieu, côté.stl".
• fixé la batterie à l'ensemble de base à l'aide du ruban adhésif double face.
• Après l'assemblage, j'ai simplement branché le connecteur JST sur la connexion de la batterie, et c'est parti!
Et c'est ainsi que j'ai imprimé et assemblé en 3D "un simple mécanisme" de marche "imprimé en 3D.
J'espère que vous l'avez apprécié!