行走的南瓜二 3D打印































26837 视图 1 喜欢 0 下载 下载
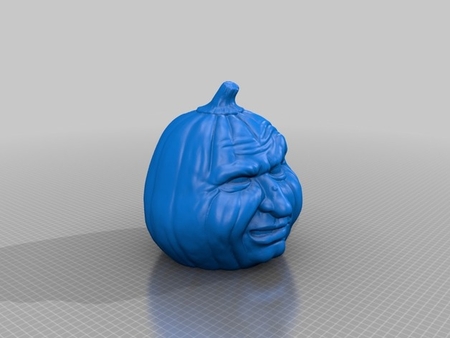
这个版本只有 125 毫米高,组装后重量为 93 克(32 盎司),比原来的版本小得�...��,轻得多,需要的零件(3D 打印和购买)也更少。只需旋转磁性连接的盖子,即可激活簧片开关,将电池连接到电机,为万圣节主题桌子上的行走南瓜 II 供电!
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时询问,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
最后说明一下,我不会以任何形式获得此模型中使用的零件和/或材料的补偿。
我购买了以下零件:
• 150rpm 6VDC 齿轮马达(在线搜索“DC 6V 150RPM 微型减速电机电...动齿轮马达”)。
• 一块电池(我使用过 https://www.adafruit.com/product/1578 和 https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 针电缆(https://www.adafruit.com/product/3814)。
• 四个 6.35 x 1.6mm 钕磁铁(当地业余爱好商店)。
• 两个 12 x 2.7mm 钕磁铁(当地业余爱好商店)。
• 一个簧片开关(在线搜索“Gikfun 20pcs Reed Switch, EK1621x2”)。
• 您还需要一个合适的电池充电器。
我用 3D 打印了以下部件:
• 一个“Axle, Drive.stl”,20% 填充,0.15 毫米层高。
• 两个“Axle, Leg.stl”,20% 填充,0.15 毫米层高。
• 两个“Bolt.stl”,20% 填充,0.15 毫米层高。
• 一个“Cam, Drive.stl”,20% 填充,0.15 毫米层高。
• 一个“Chassis.stl”,20% 填充,0.15 毫米层高。
• 两个“Foot.stl”,20% 填充,0.15 毫米层高。
• 一个“Gear, Drive.stl”,20% 填充,0.15 毫米层高。
• 一个“Gear, Motor.stl”,20% 填充,.15mm 层高。
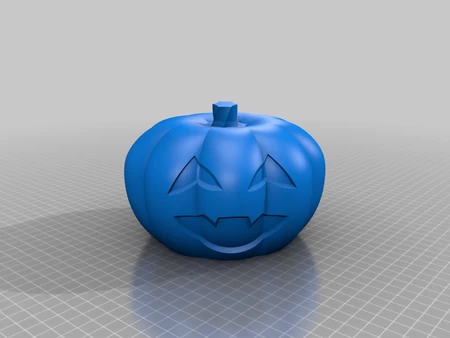
• 一个“Jack O'Lantern, Lid.stl”,20% 填充,.15mm 层高。
• 一个“Jack O'Lantern.3mf”,20% 填充,.15mm 层高。
• 两个“Leg.stl”,20% 填充,.15mm 层高。
• 一个“Pin.stl”,20% 填充,.15mm 层高。
• 一个“Stem.stl”,20% 填充,.15mm 层高。
这是一个高精度打印和组装模型。组装前,对所有零件进行测试和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保构建板的所有“渗出物”均已清除,且所有边缘均已光滑。我使用小型珠宝锉刀并耐心地执行此步骤。
我使用丝锥和板牙套装(6mm x 1)清洁螺纹。
我使用小点氰基丙烯酸酯胶将接线固定到底盘上,并在需要时固定螺纹,并使用轻质机油润滑齿轮和轴。
准备底盘。
为了准备底盘,我执行了以下步骤:
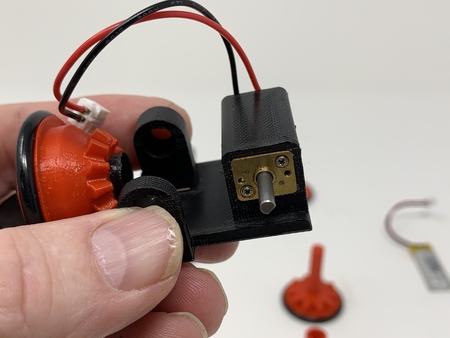
• 将电机压入“Chassis.stl”上的电机支架,使电机轴露出约 2mm(留出安装电机齿轮的空间)。
• 将“Gear, Motor.stl”压到电机轴上。
• 将电机进一步压入电机支架,直到电机低于底盘外侧表面 4mm(为支腿提供间隙)。
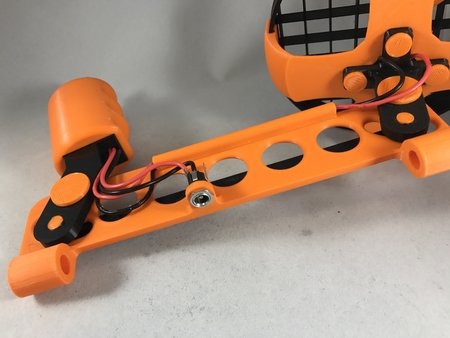
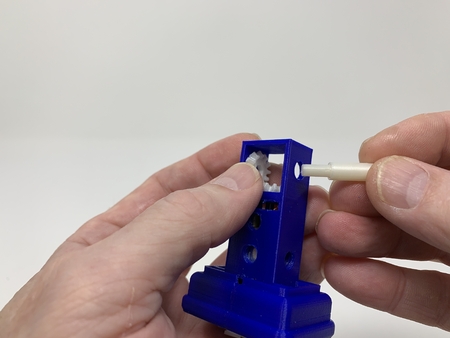
• 将 26awg 长度的黑线焊接到电机“-”端子,将其布线到底盘上的簧片开关插槽,然后使用厚氰基丙烯酸酯胶将其固定到位。
• 将簧片开关放置在底盘组件中,然后将簧片开关的一端焊接到黑线上(如果需要,请留出足够的松弛度以便对准簧片开关)。
• 将 26awg 长度的黑线焊接到簧片开关的另一端,将其向下布线并穿过底盘上的电池舱并从前面出来,然后使用厚氰基丙烯酸酯胶将其固定到位(如果需要,请留出足够的松弛度以便对准簧片开关)。
• 将 JST 连接器的红线焊接到电机“+”端子。
• 将 26awg 黑线的自由端焊接到 JST 连接器黑线上。
连接腿和脚。
为了连接腿和脚,我执行了以下步骤:
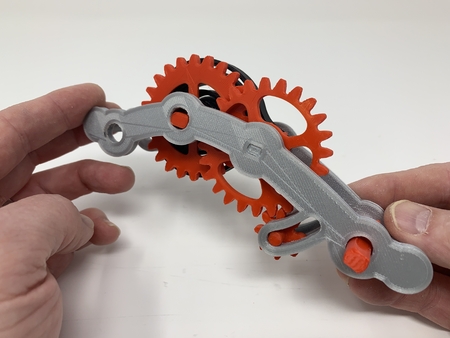
• 将一个“Leg.stl”滑到“Axle, Drive.stl”上。
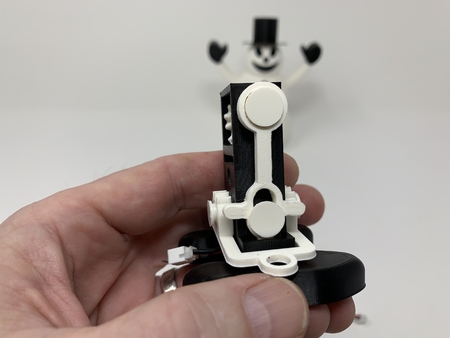
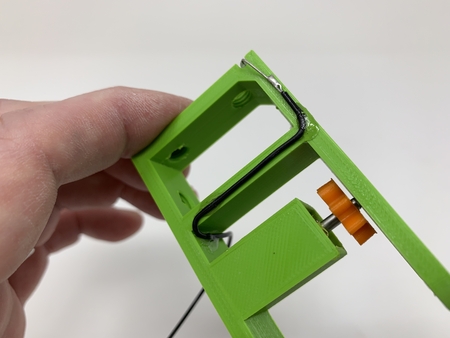
• 将驱动轴组件轴从电机齿轮侧部分滑入底盘组件驱动轴孔中,将“Gear, Drive.stl”按到驱动轴上,然后将轴滑过底盘中剩余的驱动轴孔。
• 使用一个“Axle, Leg.stl”将腿部组件固定到底盘组件上。
• 将“Cam, Drive.stl”放置在剩余的“Leg.stl”上,然后将组件拧到驱动轴螺纹上,使凸轮彼此成 180 度(例如,当一个凸轮完全向上时,另一个凸轮完全向下)。
• 使用剩余的“Axle, Leg.stl”将腿部组件固定到底盘组件上。
• 将一个“Foot.stl”按到其中一条腿上,并将较长的杆伸出。
• 将剩余的“Foot.stl”压到剩余的腿上,同样将较长的杆伸出。
添加磁铁。
要添加磁铁,我执行了以下步骤:
• 将磁铁首尾相连地堆叠在一起。
• 在顶部小磁铁的顶部放置一个“X”。
• 将小磁铁的“X”朝外放置在平冲头上(任何平面金属工具都可以)。
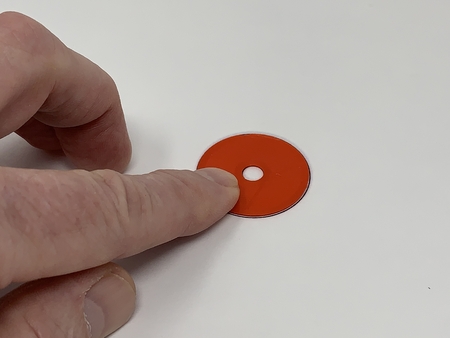
• 将小磁铁压入“Jack O'Lantern.3mf”中较小的磁铁孔中。
• 在顶部大磁铁的顶部放置一个“X”。
• 将大磁铁的“X”朝外放置在平冲头上。
• 将大磁铁的“X”朝外放置在平冲头上。
• 将大磁铁压入“Jack O'Lantern.3mf”中较大的磁铁孔中。
• 对“Jack O'Lantern Lid.stl”中剩余的三个小磁铁和一个大磁铁重复此过程。
最终组装和操作。
对于最终组装,我执行了以下步骤:
• 将“Pin.stl”拧入盖子组件。
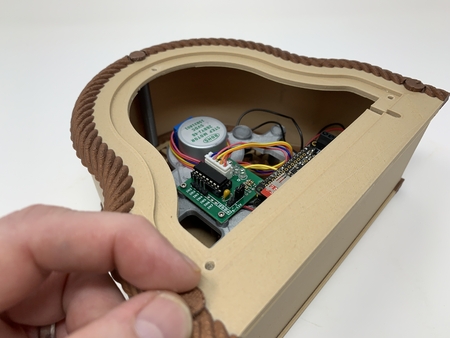
• 使用双面胶带将电池固定在电池舱顶部,确保电池和电缆不会与齿轮接触。
• 将 Jack O'Lantern 组件放在框架组件上,然后使用两个“Bolt.stl”固定到位。
• 将盖子放在 Jack O'Lantern 组件上。
• 将“Stem.stl”按到盖子组件上。
为了操作模型,我旋转盖子,使簧片开关磁铁(盖子中的小型隔离磁铁)激活簧片开关。 要停止模型,我将盖子旋转到相反的方向。 如果需要,我调整了簧片开关的位置。
当电池耗尽时,我会将连接器从机身中拔出,断开连接并使用合适的电池充电器为电池充电,然后重新连接并将连接器塞回机身。
这就是我 3D 打印和组装“行走南瓜 II”的方法。
希望你喜欢!
设计师
Greg Zumwalt3D 模型描述
我五年前设计的行走南瓜的更新。这个版本只有 125 毫米高,组装后重量为 93 克(32 盎司),比原来的版本小得�...��,轻得多,需要的零件(3D 打印和购买)也更少。只需旋转磁性连接的盖子,即可激活簧片开关,将电池连接到电机,为万圣节主题桌子上的行走南瓜 II 供电!
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时询问,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
最后说明一下,我不会以任何形式获得此模型中使用的零件和/或材料的补偿。
3D模型打印参数
购买、打印并准备零件。我购买了以下零件:
• 150rpm 6VDC 齿轮马达(在线搜索“DC 6V 150RPM 微型减速电机电...动齿轮马达”)。
• 一块电池(我使用过 https://www.adafruit.com/product/1578 和 https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 针电缆(https://www.adafruit.com/product/3814)。
• 四个 6.35 x 1.6mm 钕磁铁(当地业余爱好商店)。
• 两个 12 x 2.7mm 钕磁铁(当地业余爱好商店)。
• 一个簧片开关(在线搜索“Gikfun 20pcs Reed Switch, EK1621x2”)。
• 您还需要一个合适的电池充电器。
我用 3D 打印了以下部件:
• 一个“Axle, Drive.stl”,20% 填充,0.15 毫米层高。
• 两个“Axle, Leg.stl”,20% 填充,0.15 毫米层高。
• 两个“Bolt.stl”,20% 填充,0.15 毫米层高。
• 一个“Cam, Drive.stl”,20% 填充,0.15 毫米层高。
• 一个“Chassis.stl”,20% 填充,0.15 毫米层高。
• 两个“Foot.stl”,20% 填充,0.15 毫米层高。
• 一个“Gear, Drive.stl”,20% 填充,0.15 毫米层高。
• 一个“Gear, Motor.stl”,20% 填充,.15mm 层高。
• 一个“Jack O'Lantern, Lid.stl”,20% 填充,.15mm 层高。
• 一个“Jack O'Lantern.3mf”,20% 填充,.15mm 层高。
• 两个“Leg.stl”,20% 填充,.15mm 层高。
• 一个“Pin.stl”,20% 填充,.15mm 层高。
• 一个“Stem.stl”,20% 填充,.15mm 层高。
这是一个高精度打印和组装模型。组装前,对所有零件进行测试和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保构建板的所有“渗出物”均已清除,且所有边缘均已光滑。我使用小型珠宝锉刀并耐心地执行此步骤。
我使用丝锥和板牙套装(6mm x 1)清洁螺纹。
我使用小点氰基丙烯酸酯胶将接线固定到底盘上,并在需要时固定螺纹,并使用轻质机油润滑齿轮和轴。
准备底盘。
为了准备底盘,我执行了以下步骤:
• 将电机压入“Chassis.stl”上的电机支架,使电机轴露出约 2mm(留出安装电机齿轮的空间)。
• 将“Gear, Motor.stl”压到电机轴上。
• 将电机进一步压入电机支架,直到电机低于底盘外侧表面 4mm(为支腿提供间隙)。
• 将 26awg 长度的黑线焊接到电机“-”端子,将其布线到底盘上的簧片开关插槽,然后使用厚氰基丙烯酸酯胶将其固定到位。
• 将簧片开关放置在底盘组件中,然后将簧片开关的一端焊接到黑线上(如果需要,请留出足够的松弛度以便对准簧片开关)。
• 将 26awg 长度的黑线焊接到簧片开关的另一端,将其向下布线并穿过底盘上的电池舱并从前面出来,然后使用厚氰基丙烯酸酯胶将其固定到位(如果需要,请留出足够的松弛度以便对准簧片开关)。
• 将 JST 连接器的红线焊接到电机“+”端子。
• 将 26awg 黑线的自由端焊接到 JST 连接器黑线上。
连接腿和脚。
为了连接腿和脚,我执行了以下步骤:
• 将一个“Leg.stl”滑到“Axle, Drive.stl”上。
• 将驱动轴组件轴从电机齿轮侧部分滑入底盘组件驱动轴孔中,将“Gear, Drive.stl”按到驱动轴上,然后将轴滑过底盘中剩余的驱动轴孔。
• 使用一个“Axle, Leg.stl”将腿部组件固定到底盘组件上。
• 将“Cam, Drive.stl”放置在剩余的“Leg.stl”上,然后将组件拧到驱动轴螺纹上,使凸轮彼此成 180 度(例如,当一个凸轮完全向上时,另一个凸轮完全向下)。
• 使用剩余的“Axle, Leg.stl”将腿部组件固定到底盘组件上。
• 将一个“Foot.stl”按到其中一条腿上,并将较长的杆伸出。
• 将剩余的“Foot.stl”压到剩余的腿上,同样将较长的杆伸出。
添加磁铁。
要添加磁铁,我执行了以下步骤:
• 将磁铁首尾相连地堆叠在一起。
• 在顶部小磁铁的顶部放置一个“X”。
• 将小磁铁的“X”朝外放置在平冲头上(任何平面金属工具都可以)。
• 将小磁铁压入“Jack O'Lantern.3mf”中较小的磁铁孔中。
• 在顶部大磁铁的顶部放置一个“X”。
• 将大磁铁的“X”朝外放置在平冲头上。
• 将大磁铁的“X”朝外放置在平冲头上。
• 将大磁铁压入“Jack O'Lantern.3mf”中较大的磁铁孔中。
• 对“Jack O'Lantern Lid.stl”中剩余的三个小磁铁和一个大磁铁重复此过程。
最终组装和操作。
对于最终组装,我执行了以下步骤:
• 将“Pin.stl”拧入盖子组件。
• 使用双面胶带将电池固定在电池舱顶部,确保电池和电缆不会与齿轮接触。
• 将 Jack O'Lantern 组件放在框架组件上,然后使用两个“Bolt.stl”固定到位。
• 将盖子放在 Jack O'Lantern 组件上。
• 将“Stem.stl”按到盖子组件上。
为了操作模型,我旋转盖子,使簧片开关磁铁(盖子中的小型隔离磁铁)激活簧片开关。 要停止模型,我将盖子旋转到相反的方向。 如果需要,我调整了簧片开关的位置。
当电池耗尽时,我会将连接器从机身中拔出,断开连接并使用合适的电池充电器为电池充电,然后重新连接并将连接器塞回机身。
这就是我 3D 打印和组装“行走南瓜 II”的方法。
希望你喜欢!