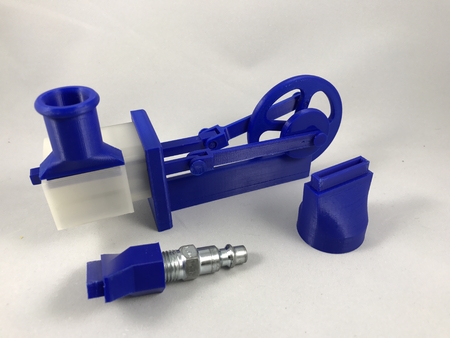
La perseverancia petite, motorizado en 3D para imprimir






















5101 Visualizaciones 1 Me gusta 0 Descargas realizadas Descarga aqui la pieza desde 3dforprint
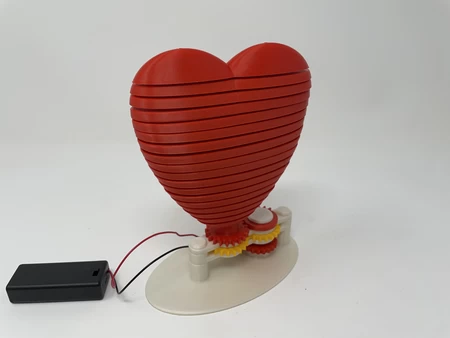
"La perseverancia Petite, Motorizado" es una versión motorizada de mi anterior modelo de "la ...Perseverancia, la Petite". He diseñado, montado y probado este modelo para su uso con un solar recargable fuente de alimentación. El uso de esta fuente de alimentación me permite colocar el modelo cerca de una ventana con la célula solar de cara al sol, y funciona de día y de noche, sin parar, sin usar la red eléctrica o baterías reemplazables. También he encontrado el cargador para que funcione bien con una luz halógena de frente al sol, pero que derrota el propósito!
Usted tendrá que comprar un engranaje motor y la fuente de alimentación para completar "la Perseverancia Petite, Motorizado", como se describe en el primer paso.
Como de costumbre, probablemente olvidó de un archivo o dos o quién sabe qué otra cosa, así que si usted tiene alguna pregunta, por favor no dude en preguntar como hago errores en la abundancia.
Diseñado utilizando Autodesk Fusion 360, rodajas de uso de Cura 2.5.0, e impresas en PLA en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendida.
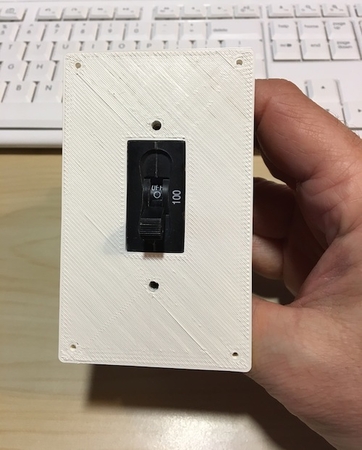
Como se ha mencionado, usted tendrá que comprar tanto un motor de engranajes y una fuente de alimenta...ción para completar este modelo. El motor reductor que se utiliza es un 6VCD 60 motor de engranajes ("DC 6V 30RPM de 3 mm de Eje Mini Metal de la rueda dentada del Motor del Engranaje de GA12-N20") que he encontrado en Amazon, pero están disponibles en numerosos otros proveedores.
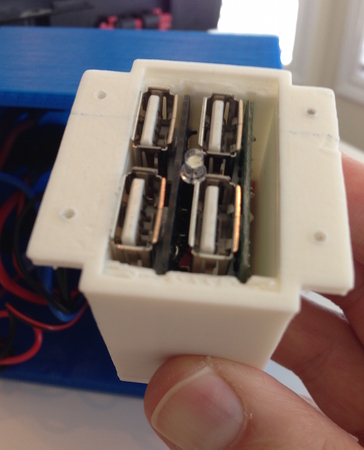
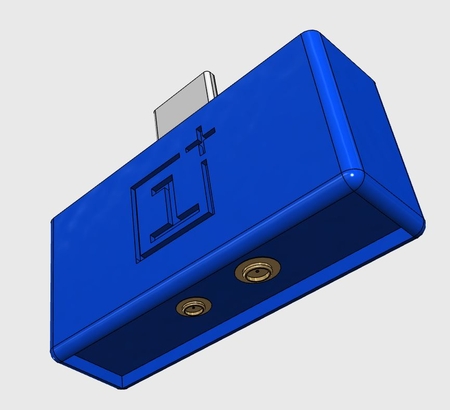
La fuente de alimentación que se utiliza un solar de recarga 3.7 mAh de la batería de litio fuente de alimentación de Adafruit. Los componentes son los paneles solares (Medio de 6V 2W panel Solar - 2.0 Vatios PID: 200), cable adaptador de 3.5 / 1.3 mm o 3.8 / 1.1 mm 5.5 / 2.1 mm Jack de CC del Adaptador de Cable PID: 2788), la energía solar cargador (USB / DC / Solar de Iones de Litio Polímero/cargador - v2 PID: 390) y la batería (de Litio de la Batería de Polímero de Ion - 3,7 v 2500mAhPID: 328), sin embargo, puede utilizar cualquier 1.5 a 6vcd fuente de alimentación o la batería. Si usted eligió la fuente de alimentación, en el montaje según las instrucciones.
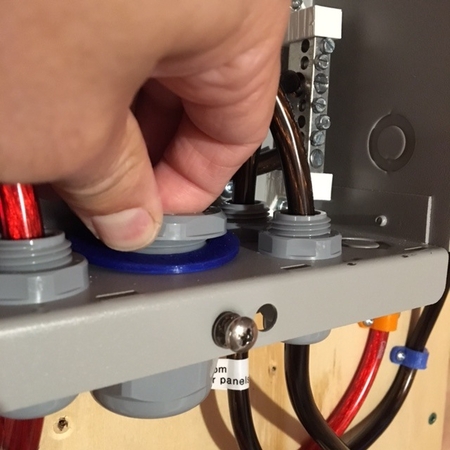
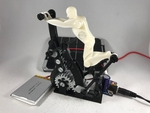
La fuente de alimentación elegí vino con un conector JST con un rojo y el cable negro. Soldé el cable rojo al motor + terminal y el cable negro del motor - terminal.
Imprimí todas las partes en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendido en .1 mm de resolución vertical. He adjuntado un archivo PDF que contiene el nombre, count, relleno, borde, balsa y soporte de configuración para cada una de las partes.
Antes del montaje, compruebe el ajuste y recorte, archivo, arena, etc. todas las piezas que sean necesarias para el movimiento suave de las superficies en movimiento, y ajuste apretado para no mover las superficies. Dependiendo de los colores que elegiste y la configuración de la impresora, más o menos cortar, limar y/o lijado puede ser requerido. Cuidadosamente todos los bordes que estaban en contacto con la placa de construcción para asegurarnos de que todos placa de construcción "cieno" es retirado y que todos los bordes son lisos. He utilizado los pequeños joyeros archivos y un montón de paciencia para realizar este paso.
Este modelo utiliza rosca de montaje y todos los hilos son de M6 por 1. Nota en el PDF que me imprime ciertas partes con agujeros roscados en una balsa con el fin de hacer post de impresión limpieza de estas piezas mucho más fácil. Si después de la impresión de los orificios roscados son difíciles de instalar una parte en, a continuación, utilizar un M6 1 tornillo de acero, o un M6 por 1 toque para limpiar ellos.
Nota también he impreso "Torso.stl" y "Base de Montaje del Motor.stl" el uso de un ala para ayudar en el mantenimiento de estas piezas en su lugar durante la impresión.
2) Montar el Carácter.
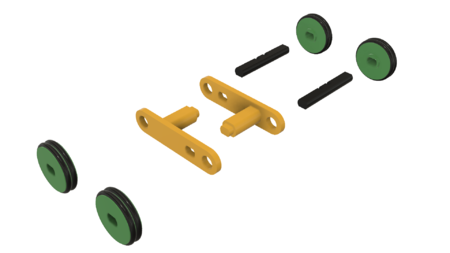
Fije las dos "del Brazo.stl" a "Torso.stl" el uso de dos "Eje del Brazo del Torso.stl", como se muestra. Los brazos deben girar libremente.
Adjuntar "De La Pierna Izquierda Inferior.stl" a "de la Pierna Izquierda Superior.stl" uso "del Eje de la Pierna Inferior.stl". La parte inferior de la pierna debe girar libremente.
Adjuntar "De La Pierna Inferior Derecha.stl" a "de la Pierna Derecha Superior.stl" usando el resto del "Eje de la Pierna Inferior.stl". De nuevo, la parte inferior de la pierna debe girar libremente.
Adjuntar la pierna izquierda de la asamblea para el lado izquierdo del torso el uso de un "Eje del Brazo del Torso.stl", como se muestra. La asamblea debe girar libremente.
Adjuntar la pierna derecha de montaje en el lado derecho del torso usando el resto del "Eje del Brazo del Torso.stl", como se muestra. De nuevo, la asamblea debe girar libremente.
3) Montar la Base.
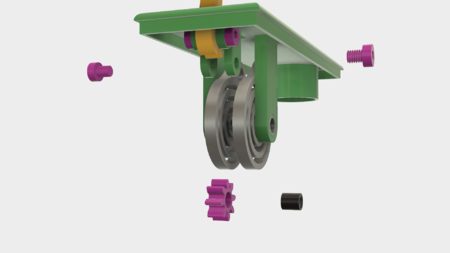
El Uso De "Engranajes Del Eje De La Polea.stl" para unir dos "Engranaje de estímulo (20 dientes).stl" para la realización de la polea de la asamblea. Asegúrese de que la asamblea es ajustado, los dientes de la espuela de alinear engranajes, y los dos engranajes son paralelas entre sí como se muestra. Deslice el ensamble dentro de la Base".stl" en la posición que se muestra y seguro en su lugar con dos "Eje del Engranaje.stl". Una vez seguro de que la gran polea de la asamblea debe girar libremente en la base.
Instale el resto de "Engranaje de estímulo (20 dientes).stl" en la base como se muestra y seguro en su lugar con dos "Excéntrico de la Pierna.stl". Cuando bien apretados los dos excéntricos debe ser de 180 grados de distancia el uno del otro (cuando un excéntrico está apuntando hacia arriba, el otro debe estar apuntando hacia abajo). Si bien apretados los dos excéntricos no son de 180 grados de distancia, quitar, hacer una pequeña pelota con un 4mm pedazo cuadrado de tejido, colóquelo dentro del engranaje de subprocesos, a continuación, vuelva a instalar el excéntricos e inténtelo de nuevo. Cuando haya finalizado, los engranajes giren libremente en la base.
Instalar el primer Engranaje cilíndrico "(10 dientes).stl" en el menor engranaje de estímulo de 10 dientes posición en la base como se muestra y seguro en su lugar con dos "Eje del Engranaje.stl". Prueba para asegurarse de que los engranajes giran libremente en la base.
Instale el segundo Engranaje cilíndrico "(10 dientes).stl" en el más alto de engranaje cilíndrico de 10 dientes posición en la base como se muestra y asegúrelo en su lugar con un "Eje del Engranaje.stl" y un "Excéntrico Torso.stl". El equipo debe girar libremente en la base.
El último engranaje de estímulo de 10 dientes se instaló el último, en el centro de engranaje cilíndrico de 10 dientes posición. Después de este equipo es instalado, "Excéntrico Torso.stl" debe estar apuntando a la parte trasera de la base (a la derecha en la fotografía), y la izquierda "Excéntrico de la Pierna.stl" debe estar apuntando hacia abajo. Para lograr esto, gire a la izquierda "Excéntrico de la Pierna.stl" de modo que apunte hacia abajo y gire la "Excéntrica Torso.stl", que apunta directamente hacia abajo, a continuación, deslice el final "Engranaje de estímulo (10 dientes).stl" en la posición entre los dos primeros "Engranaje de estímulo (10 dientes).stl". Cuando se desliza el último engranaje de estímulo a la posición hold "Excéntrico de la Pierna.stl" apuntando hacia abajo, y permitir "Excéntrico Torso.stl" para rotar en la posición. Seguro que el final engranaje de estímulo de 10 dientes en su posición mediante un "Eje del Engranaje.stl" y un "Eje de Engranaje para el Motor.stl". Nota "Engranajes del Eje de Motor.stl" está instalado en el soporte del motor del lado de la base. Asegúrese de que todos los engranajes de la gira libremente.
Instalar "Brazo Torso Corto.stl" en la base en la posición que se muestra el uso de "Eje del Brazo de Torso Corto.stl". El brazo debe girar libremente en la base.
A continuación, instale "Brazo Torso Largo.stl" en posición como se muestra el uso de dos "Eje del Brazo.stl". Fije el extremo de "Brazo de Torso Largo.stl" que tiene un pequeño punto en el brazo de cara a la "Excéntrica Torso.stl", y el centro de "Brazo de Torso Corto.stl". Los engranajes deben girar libremente después de estos brazos están instalados.
Instalar un "Brazo de la Pierna Corta.stl" en la base en la posición que se muestra el uso de un "Eje del Brazo.stl". El brazo debe girar libremente en la base.
A continuación, instale "el Brazo Largo.stl" en posición como se muestra el uso de dos "Eje del Brazo.stl". Fije el extremo de "Brazo Largo.stl" que no tiene un punto pequeño en el brazo de cara a la "Excéntrica de la Pierna.stl", y el centro de "Brazo de la Pierna Corta.stl". Los engranajes deben girar libremente después de estos brazos están instalados. Repita este proceso para el otro lado.
Por último, gire "Engranajes del Eje de Motor.stl" de manera tal que el eje del motor agujero se alinea con el eje del motor, a continuación, pulse el motor en la posición en la base como se muestra.
4) Conecte el Carácter a la Base.
Adjuntar los Personajes brazos a la base usando el "Eje de los Brazos.stl", como se muestra.
Adjuntar los Personajes torso a "Brazo Torso Largo.stl" uso "Eje del Torso.stl", como se muestra.
Adjuntar los Personajes de las Piernas a los dos "Brazo Largo.stl" el uso de dos "Brazos del Eje.stl", como se muestra.
Felicitaciones, usted está listo!
Espero que lo disfruten!
Diseñador
Greg ZumwaltDescripción del modelo 3d
Una versión motorizada de la Perseverancia, la Petite"La perseverancia Petite, Motorizado" es una versión motorizada de mi anterior modelo de "la ...Perseverancia, la Petite". He diseñado, montado y probado este modelo para su uso con un solar recargable fuente de alimentación. El uso de esta fuente de alimentación me permite colocar el modelo cerca de una ventana con la célula solar de cara al sol, y funciona de día y de noche, sin parar, sin usar la red eléctrica o baterías reemplazables. También he encontrado el cargador para que funcione bien con una luz halógena de frente al sol, pero que derrota el propósito!
Usted tendrá que comprar un engranaje motor y la fuente de alimentación para completar "la Perseverancia Petite, Motorizado", como se describe en el primer paso.
Como de costumbre, probablemente olvidó de un archivo o dos o quién sabe qué otra cosa, así que si usted tiene alguna pregunta, por favor no dude en preguntar como hago errores en la abundancia.
Diseñado utilizando Autodesk Fusion 360, rodajas de uso de Cura 2.5.0, e impresas en PLA en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendida.
Parametros de impresión 3d
1) la Compra, Imprimir y Preparar las Piezas.Como se ha mencionado, usted tendrá que comprar tanto un motor de engranajes y una fuente de alimenta...ción para completar este modelo. El motor reductor que se utiliza es un 6VCD 60 motor de engranajes ("DC 6V 30RPM de 3 mm de Eje Mini Metal de la rueda dentada del Motor del Engranaje de GA12-N20") que he encontrado en Amazon, pero están disponibles en numerosos otros proveedores.
La fuente de alimentación que se utiliza un solar de recarga 3.7 mAh de la batería de litio fuente de alimentación de Adafruit. Los componentes son los paneles solares (Medio de 6V 2W panel Solar - 2.0 Vatios PID: 200), cable adaptador de 3.5 / 1.3 mm o 3.8 / 1.1 mm 5.5 / 2.1 mm Jack de CC del Adaptador de Cable PID: 2788), la energía solar cargador (USB / DC / Solar de Iones de Litio Polímero/cargador - v2 PID: 390) y la batería (de Litio de la Batería de Polímero de Ion - 3,7 v 2500mAhPID: 328), sin embargo, puede utilizar cualquier 1.5 a 6vcd fuente de alimentación o la batería. Si usted eligió la fuente de alimentación, en el montaje según las instrucciones.
La fuente de alimentación elegí vino con un conector JST con un rojo y el cable negro. Soldé el cable rojo al motor + terminal y el cable negro del motor - terminal.
Imprimí todas las partes en una Ultimaker 2+ Extendida y una Ultimaker 3 Extendido en .1 mm de resolución vertical. He adjuntado un archivo PDF que contiene el nombre, count, relleno, borde, balsa y soporte de configuración para cada una de las partes.
Antes del montaje, compruebe el ajuste y recorte, archivo, arena, etc. todas las piezas que sean necesarias para el movimiento suave de las superficies en movimiento, y ajuste apretado para no mover las superficies. Dependiendo de los colores que elegiste y la configuración de la impresora, más o menos cortar, limar y/o lijado puede ser requerido. Cuidadosamente todos los bordes que estaban en contacto con la placa de construcción para asegurarnos de que todos placa de construcción "cieno" es retirado y que todos los bordes son lisos. He utilizado los pequeños joyeros archivos y un montón de paciencia para realizar este paso.
Este modelo utiliza rosca de montaje y todos los hilos son de M6 por 1. Nota en el PDF que me imprime ciertas partes con agujeros roscados en una balsa con el fin de hacer post de impresión limpieza de estas piezas mucho más fácil. Si después de la impresión de los orificios roscados son difíciles de instalar una parte en, a continuación, utilizar un M6 1 tornillo de acero, o un M6 por 1 toque para limpiar ellos.
Nota también he impreso "Torso.stl" y "Base de Montaje del Motor.stl" el uso de un ala para ayudar en el mantenimiento de estas piezas en su lugar durante la impresión.
2) Montar el Carácter.
Fije las dos "del Brazo.stl" a "Torso.stl" el uso de dos "Eje del Brazo del Torso.stl", como se muestra. Los brazos deben girar libremente.
Adjuntar "De La Pierna Izquierda Inferior.stl" a "de la Pierna Izquierda Superior.stl" uso "del Eje de la Pierna Inferior.stl". La parte inferior de la pierna debe girar libremente.
Adjuntar "De La Pierna Inferior Derecha.stl" a "de la Pierna Derecha Superior.stl" usando el resto del "Eje de la Pierna Inferior.stl". De nuevo, la parte inferior de la pierna debe girar libremente.
Adjuntar la pierna izquierda de la asamblea para el lado izquierdo del torso el uso de un "Eje del Brazo del Torso.stl", como se muestra. La asamblea debe girar libremente.
Adjuntar la pierna derecha de montaje en el lado derecho del torso usando el resto del "Eje del Brazo del Torso.stl", como se muestra. De nuevo, la asamblea debe girar libremente.
3) Montar la Base.
El Uso De "Engranajes Del Eje De La Polea.stl" para unir dos "Engranaje de estímulo (20 dientes).stl" para la realización de la polea de la asamblea. Asegúrese de que la asamblea es ajustado, los dientes de la espuela de alinear engranajes, y los dos engranajes son paralelas entre sí como se muestra. Deslice el ensamble dentro de la Base".stl" en la posición que se muestra y seguro en su lugar con dos "Eje del Engranaje.stl". Una vez seguro de que la gran polea de la asamblea debe girar libremente en la base.
Instale el resto de "Engranaje de estímulo (20 dientes).stl" en la base como se muestra y seguro en su lugar con dos "Excéntrico de la Pierna.stl". Cuando bien apretados los dos excéntricos debe ser de 180 grados de distancia el uno del otro (cuando un excéntrico está apuntando hacia arriba, el otro debe estar apuntando hacia abajo). Si bien apretados los dos excéntricos no son de 180 grados de distancia, quitar, hacer una pequeña pelota con un 4mm pedazo cuadrado de tejido, colóquelo dentro del engranaje de subprocesos, a continuación, vuelva a instalar el excéntricos e inténtelo de nuevo. Cuando haya finalizado, los engranajes giren libremente en la base.
Instalar el primer Engranaje cilíndrico "(10 dientes).stl" en el menor engranaje de estímulo de 10 dientes posición en la base como se muestra y seguro en su lugar con dos "Eje del Engranaje.stl". Prueba para asegurarse de que los engranajes giran libremente en la base.
Instale el segundo Engranaje cilíndrico "(10 dientes).stl" en el más alto de engranaje cilíndrico de 10 dientes posición en la base como se muestra y asegúrelo en su lugar con un "Eje del Engranaje.stl" y un "Excéntrico Torso.stl". El equipo debe girar libremente en la base.
El último engranaje de estímulo de 10 dientes se instaló el último, en el centro de engranaje cilíndrico de 10 dientes posición. Después de este equipo es instalado, "Excéntrico Torso.stl" debe estar apuntando a la parte trasera de la base (a la derecha en la fotografía), y la izquierda "Excéntrico de la Pierna.stl" debe estar apuntando hacia abajo. Para lograr esto, gire a la izquierda "Excéntrico de la Pierna.stl" de modo que apunte hacia abajo y gire la "Excéntrica Torso.stl", que apunta directamente hacia abajo, a continuación, deslice el final "Engranaje de estímulo (10 dientes).stl" en la posición entre los dos primeros "Engranaje de estímulo (10 dientes).stl". Cuando se desliza el último engranaje de estímulo a la posición hold "Excéntrico de la Pierna.stl" apuntando hacia abajo, y permitir "Excéntrico Torso.stl" para rotar en la posición. Seguro que el final engranaje de estímulo de 10 dientes en su posición mediante un "Eje del Engranaje.stl" y un "Eje de Engranaje para el Motor.stl". Nota "Engranajes del Eje de Motor.stl" está instalado en el soporte del motor del lado de la base. Asegúrese de que todos los engranajes de la gira libremente.
Instalar "Brazo Torso Corto.stl" en la base en la posición que se muestra el uso de "Eje del Brazo de Torso Corto.stl". El brazo debe girar libremente en la base.
A continuación, instale "Brazo Torso Largo.stl" en posición como se muestra el uso de dos "Eje del Brazo.stl". Fije el extremo de "Brazo de Torso Largo.stl" que tiene un pequeño punto en el brazo de cara a la "Excéntrica Torso.stl", y el centro de "Brazo de Torso Corto.stl". Los engranajes deben girar libremente después de estos brazos están instalados.
Instalar un "Brazo de la Pierna Corta.stl" en la base en la posición que se muestra el uso de un "Eje del Brazo.stl". El brazo debe girar libremente en la base.
A continuación, instale "el Brazo Largo.stl" en posición como se muestra el uso de dos "Eje del Brazo.stl". Fije el extremo de "Brazo Largo.stl" que no tiene un punto pequeño en el brazo de cara a la "Excéntrica de la Pierna.stl", y el centro de "Brazo de la Pierna Corta.stl". Los engranajes deben girar libremente después de estos brazos están instalados. Repita este proceso para el otro lado.
Por último, gire "Engranajes del Eje de Motor.stl" de manera tal que el eje del motor agujero se alinea con el eje del motor, a continuación, pulse el motor en la posición en la base como se muestra.
4) Conecte el Carácter a la Base.
Adjuntar los Personajes brazos a la base usando el "Eje de los Brazos.stl", como se muestra.
Adjuntar los Personajes torso a "Brazo Torso Largo.stl" uso "Eje del Torso.stl", como se muestra.
Adjuntar los Personajes de las Piernas a los dos "Brazo Largo.stl" el uso de dos "Brazos del Eje.stl", como se muestra.
Felicitaciones, usted está listo!
Espero que lo disfruten!