Persévérance petite, motorisé 3d pour imprimer






















5120 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
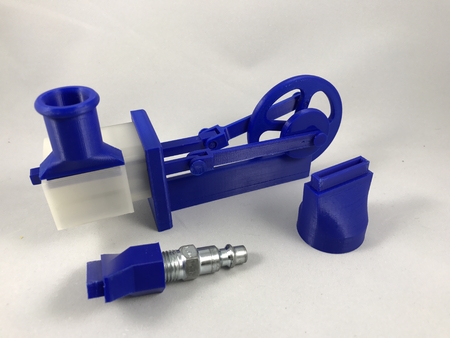
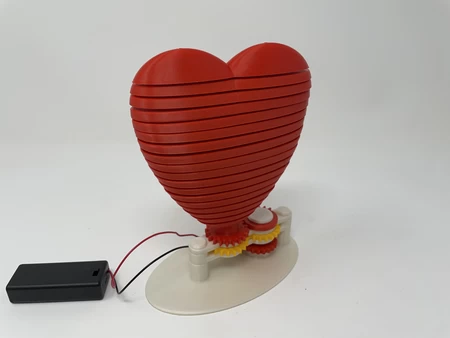
"Persévérance Petite, Motoralized" est une version motorisée de mon modèle précédent "Persev...erance, Petite". J'ai conçu, assemblé et testé ce modèle pour une utilisation avec une alimentation solaire rechargeable. L'utilisation de cette alimentation me permet de placer le modèle près d'une fenêtre avec la cellule solaire face au soleil, et il fonctionne jour et nuit, sans arrêt, en utilisant aucune puissance du secteur ou des batteries remplaçables. J'ai également trouvé que le chargeur fonctionnait bien avec une lumière halogène par opposition au soleil, mais cela bat le but!
Vous devrez acheter un moteur de vitesse et une alimentation pour compléter "la persévérance petite, motorisée" comme décrit dans la première étape.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais des erreurs en abondance.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 2.5.0, et imprimé dans PLA sur un Ultimaker 2+ étendu et un Ultimaker 3 étendu.
Comme mentionné, vous devrez acheter à la fois un moteur de vitesse et une alimentation pour complé...ter ce modèle. Le moteur d'engrenage que j'ai utilisé est un moteur d'engrenage 6VDC 60RPM ("DC 6V 30RPM Arbre 3 mm Mini moteur d'engrenage en métal GAGE GA12-N20") que j'ai trouvé sur Amazon, mais ils sont disponibles auprès de nombreux autres fournisseurs.
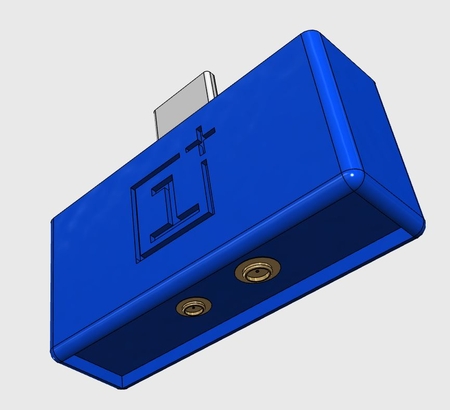
L'alimentation que j'ai utilisée était une alimentation de batterie au lithium de 3,7 mAh de 3,7 mAh d'Adafruit. Les composants sont le panneau solaire (panneau solaire moyen 6V 2V - PID de 2,0 watts: 200), câble adaptateur (3,5 / 1,3 mm ou 3,8 / 1,1 mm à 5,5 / 2,1 mm de prise cot / DC / Chargeur solaire au lithium / polymère - V2 PID: 390) et batterie (batterie en polymère au lithium ion - 3.7V 2500mAhpid: 328), cependant, vous pouvez utiliser n'importe quelle alimentation ou batterie d'alimentation de 1,5 à 6VDC. Si vous avez choisi l'alimentation que j'ai utilisée, assemblez-la conformément aux instructions.
L'alimentation que j'ai choisie est venue avec un connecteur JST avec un fil rouge et noir. J'ai soudé le fil rouge sur le moteur + la borne et le fil noir sur la borne du moteur.
J'ai imprimé toutes les pièces sur un ultimaker 2+ étendu et un Ultimaker 3 étendu à une résolution verticale de 0,1 mm. J'ai joint un PDF contenant le nom, le compte, le remplissage, le bord, le radeau et les paramètres de support pour chacune des pièces.
Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon les couleurs que vous avez choisies et les paramètres de votre imprimante, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce modèle utilise un assemblage fileté et tous les threads sont M6 par 1. Remarque dans le PDF que j'ai imprimé certaines pièces avec des trous filetés sur un radeau afin de faciliter le nettoyage de l'impression de post. Si après l'impression, les trous filetés sont difficiles pour installer une pièce, utilisez une vis en acier M6 par 1 ou un tapotement M6 par 1 pour les nettoyer.
Remarque J'ai également imprimé "torse.stl" et "base avec moteur Mount.stl" à l'aide d'un bord pour aider à maintenir ces pièces en place pendant l'impression.
2) Assemblez le caractère.
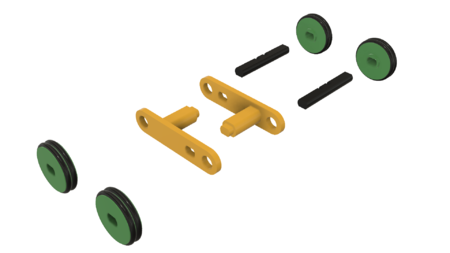
Fixez les deux "arm.stl" à "torse.stl" à l'aide de deux "Axle Arm Leg Torse.stl" comme indiqué. Les bras devraient pivoter librement.
Attachez "la jambe gauche inférieure.stl" à la "jambe gauche supérieure.stl" en utilisant "Asset Leg inférieur.stl". La jambe inférieure doit pivoter librement.
Attachez "la jambe à droite inférieure.stl" à "jambe droite supérieure.stl" en utilisant le reste "Asset Leg inférieur.stl". Encore une fois, la jambe inférieure devrait pivoter librement.
Fixez l'ensemble de jambe gauche sur le côté gauche du torse à l'aide d'un "torse de jambe de bras d'essieu.stl" comme indiqué. L'assemblage devrait pivoter librement.
Fixez l'assemblage de la jambe droite sur le côté droit du torse à l'aide du «torse de jambe du bras d'essieu restant» comme indiqué. Encore une fois, l'assemblage devrait pivoter librement.
3) Assemblez la base.
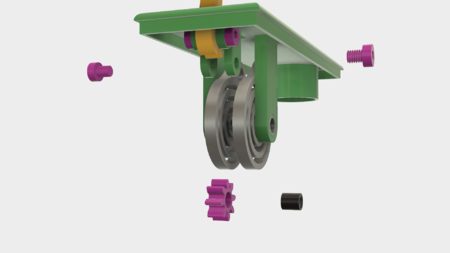
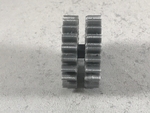
Utilisez "Axle Gear Idler.stl" pour rejoindre deux "Spur Gear (20 dents) .stl" pour faire le grand assemblage indien. Assurez-vous que l'ensemble est serré, les dents des engrenages d'éperon s'alignent et les deux engrenages sont parallèles les uns aux autres comme indiqué. Faites glisser cet assemblage dans "base.stl" dans la position indiquée et sécurisée en place avec deux "Axle Gear.stl". Une fois sécurisé, le grand assemblage de fureur doit tourner librement dans la base.
Installez le "Spur Gear (20 dents) .stl" restant dans la base comme indiqué et sécurisé en place à l'aide de deux "LEG excentrique.stl". Lorsqu'il est resserré en toute sécurité, les deux excentriques doivent être à 180 degrés les uns des autres (lorsqu'un excentrique pointe vers le haut, l'autre doit pointer directement vers le bas). Si lorsque vous resserrez en toute sécurité, les deux excentriques ne sont pas à 180 degrés séparés, retirez-les, faites une petite balle à l'aide d'un morceau de tissu carré de 4 mm, placez-le à l'intérieur des fils d'engrenage, puis réinstallez les excentriques et réessayez. Une fois terminé, les engrenages doivent tourner librement dans la base.
Installez le premier "Spur Gear (10 dents) .Stl" dans la position des dents de vitesse à éperon la plus basse 10 dans la base comme indiqué et sécurisée en place à l'aide de deux "Axle Gear.stl". Testez pour vous assurer que les engrenages tournent librement dans la base.
Installez le deuxième "Spur Gear (10 dents) .stl" dans la position de dents de vitesse à éperon la plus élevée 10 dans la base comme indiqué et sécurisé en place à l'aide d'un "Axle Gear.stl" et un "torse excentrique.stl". L'équipement doit tourner librement dans la base.
Le dernier engrenage de Spur 10 dents est installé en dernier, dans la position centrale des dents de vitesse de gigantesque 10. Une fois cet équipement installé, "Excentric Torse.stl" doit pointer vers l'arrière de la base (vers la droite sur la photo), et la "jambe excentrique" de gauche doit pointer directement vers le bas. Pour ce faire, faites pivoter la "jambe excentrique" gauche "afin qu'elle pointe directement vers le bas et tourne" Torse excentrique.stl "tel qu'il pointe directement vers le bas, puis glissez le" Spur Gear (10 dents). Position entre les deux premiers "Spur Gear (10 dents) .stl". Lorsque vous glissez le point d'épinet final en position, maintenez "Excentric Leg.stl" pointant vers le bas et permettez à "Torse excentrique" de tourner en position. Fixez la position finale de Spur Gear 10 en position à l'aide d'un "Axle Gear.stl" et d'un "Axle Gear for Motor.stl". Remarque "L'ensemble d'essieu pour le moteur.stl" est installé sur le côté du montage du moteur de la base. Assurez-vous que tous les engrenages tournent librement.
Installez "Torse du bras court.stl" dans la base dans la position indiquée à l'aide de "Axle Arm Torse Short.stl". Le bras doit pivoter librement dans la base.
Installez ensuite "Arm Torse Long.stl" en position comme indiqué à l'aide de deux "Axle Arm.stl". Fixez l'extrémité du "Torse du bras long.stl" qui a un petit point sur la face du bras à "Torse excentrique.stl", et le centre à "Arm Torso Short.stl". Les engrenages doivent tourner librement après l'installation de ces bras.
Installez un "bras de bras court.stl" dans la base dans la position indiquée en utilisant un "Axle Arm.stl". Le bras doit pivoter librement dans la base.
Installez ensuite "bras de bras long.stl" en position comme indiqué à l'aide de deux "Axle Arm.stl". Fixez l'extrémité de "le bras long.stl" qui n'a pas de petit point sur le visage du bras à "excentrique la jambe.stl", et le centre à "Arm Leg Short.stl". Les engrenages doivent tourner librement après l'installation de ces bras. Répétez ce processus pour le côté restant.
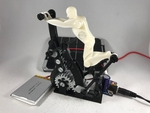
Enfin, faites tourner "le pignon d'essieu pour le moteur.stl" de sorte que le trou d'arbre du moteur s'aligne sur l'arbre du moteur, puis appuyez sur le moteur en position dans la base comme indiqué.
4) Fixez le caractère à la base.
Fixez les bras de caractères à la base à l'aide de "essieu bras.stl" comme indiqué.
Fixez le torse des caractères à "Arm Torso Long.stl" à l'aide de "essieu torse.stl" comme indiqué.
Fixez les jambes des caractères aux deux "jambe de bras long.stl" en utilisant deux "armoises d'essieu.stl" comme indiqué.
Félicitations, vous avez terminé!
J'espère que vous l'appréciez!
Designer
Greg ZumwaltDescription du modèle 3D
Une version motorisée de la persévérance, Petite"Persévérance Petite, Motoralized" est une version motorisée de mon modèle précédent "Persev...erance, Petite". J'ai conçu, assemblé et testé ce modèle pour une utilisation avec une alimentation solaire rechargeable. L'utilisation de cette alimentation me permet de placer le modèle près d'une fenêtre avec la cellule solaire face au soleil, et il fonctionne jour et nuit, sans arrêt, en utilisant aucune puissance du secteur ou des batteries remplaçables. J'ai également trouvé que le chargeur fonctionnait bien avec une lumière halogène par opposition au soleil, mais cela bat le but!
Vous devrez acheter un moteur de vitesse et une alimentation pour compléter "la persévérance petite, motorisée" comme décrit dans la première étape.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais des erreurs en abondance.
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 2.5.0, et imprimé dans PLA sur un Ultimaker 2+ étendu et un Ultimaker 3 étendu.
Paramètres d'impression du modèle 3D
1) Achetez, imprimez et préparez les pièces.Comme mentionné, vous devrez acheter à la fois un moteur de vitesse et une alimentation pour complé...ter ce modèle. Le moteur d'engrenage que j'ai utilisé est un moteur d'engrenage 6VDC 60RPM ("DC 6V 30RPM Arbre 3 mm Mini moteur d'engrenage en métal GAGE GA12-N20") que j'ai trouvé sur Amazon, mais ils sont disponibles auprès de nombreux autres fournisseurs.
L'alimentation que j'ai utilisée était une alimentation de batterie au lithium de 3,7 mAh de 3,7 mAh d'Adafruit. Les composants sont le panneau solaire (panneau solaire moyen 6V 2V - PID de 2,0 watts: 200), câble adaptateur (3,5 / 1,3 mm ou 3,8 / 1,1 mm à 5,5 / 2,1 mm de prise cot / DC / Chargeur solaire au lithium / polymère - V2 PID: 390) et batterie (batterie en polymère au lithium ion - 3.7V 2500mAhpid: 328), cependant, vous pouvez utiliser n'importe quelle alimentation ou batterie d'alimentation de 1,5 à 6VDC. Si vous avez choisi l'alimentation que j'ai utilisée, assemblez-la conformément aux instructions.
L'alimentation que j'ai choisie est venue avec un connecteur JST avec un fil rouge et noir. J'ai soudé le fil rouge sur le moteur + la borne et le fil noir sur la borne du moteur.
J'ai imprimé toutes les pièces sur un ultimaker 2+ étendu et un Ultimaker 3 étendu à une résolution verticale de 0,1 mm. J'ai joint un PDF contenant le nom, le compte, le remplissage, le bord, le radeau et les paramètres de support pour chacune des pièces.
Avant l'assemblage, le test d'ajustement et de garniture, le fichier, le sable, etc. toutes les pièces nécessaires pour le mouvement lisse des surfaces mobiles et l'ajustement serré pour les surfaces non mobiles. Selon les couleurs que vous avez choisies et les paramètres de votre imprimante, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour s'assurer que toutes les plaques de construction "suinter" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce modèle utilise un assemblage fileté et tous les threads sont M6 par 1. Remarque dans le PDF que j'ai imprimé certaines pièces avec des trous filetés sur un radeau afin de faciliter le nettoyage de l'impression de post. Si après l'impression, les trous filetés sont difficiles pour installer une pièce, utilisez une vis en acier M6 par 1 ou un tapotement M6 par 1 pour les nettoyer.
Remarque J'ai également imprimé "torse.stl" et "base avec moteur Mount.stl" à l'aide d'un bord pour aider à maintenir ces pièces en place pendant l'impression.
2) Assemblez le caractère.
Fixez les deux "arm.stl" à "torse.stl" à l'aide de deux "Axle Arm Leg Torse.stl" comme indiqué. Les bras devraient pivoter librement.
Attachez "la jambe gauche inférieure.stl" à la "jambe gauche supérieure.stl" en utilisant "Asset Leg inférieur.stl". La jambe inférieure doit pivoter librement.
Attachez "la jambe à droite inférieure.stl" à "jambe droite supérieure.stl" en utilisant le reste "Asset Leg inférieur.stl". Encore une fois, la jambe inférieure devrait pivoter librement.
Fixez l'ensemble de jambe gauche sur le côté gauche du torse à l'aide d'un "torse de jambe de bras d'essieu.stl" comme indiqué. L'assemblage devrait pivoter librement.
Fixez l'assemblage de la jambe droite sur le côté droit du torse à l'aide du «torse de jambe du bras d'essieu restant» comme indiqué. Encore une fois, l'assemblage devrait pivoter librement.
3) Assemblez la base.
Utilisez "Axle Gear Idler.stl" pour rejoindre deux "Spur Gear (20 dents) .stl" pour faire le grand assemblage indien. Assurez-vous que l'ensemble est serré, les dents des engrenages d'éperon s'alignent et les deux engrenages sont parallèles les uns aux autres comme indiqué. Faites glisser cet assemblage dans "base.stl" dans la position indiquée et sécurisée en place avec deux "Axle Gear.stl". Une fois sécurisé, le grand assemblage de fureur doit tourner librement dans la base.
Installez le "Spur Gear (20 dents) .stl" restant dans la base comme indiqué et sécurisé en place à l'aide de deux "LEG excentrique.stl". Lorsqu'il est resserré en toute sécurité, les deux excentriques doivent être à 180 degrés les uns des autres (lorsqu'un excentrique pointe vers le haut, l'autre doit pointer directement vers le bas). Si lorsque vous resserrez en toute sécurité, les deux excentriques ne sont pas à 180 degrés séparés, retirez-les, faites une petite balle à l'aide d'un morceau de tissu carré de 4 mm, placez-le à l'intérieur des fils d'engrenage, puis réinstallez les excentriques et réessayez. Une fois terminé, les engrenages doivent tourner librement dans la base.
Installez le premier "Spur Gear (10 dents) .Stl" dans la position des dents de vitesse à éperon la plus basse 10 dans la base comme indiqué et sécurisée en place à l'aide de deux "Axle Gear.stl". Testez pour vous assurer que les engrenages tournent librement dans la base.
Installez le deuxième "Spur Gear (10 dents) .stl" dans la position de dents de vitesse à éperon la plus élevée 10 dans la base comme indiqué et sécurisé en place à l'aide d'un "Axle Gear.stl" et un "torse excentrique.stl". L'équipement doit tourner librement dans la base.
Le dernier engrenage de Spur 10 dents est installé en dernier, dans la position centrale des dents de vitesse de gigantesque 10. Une fois cet équipement installé, "Excentric Torse.stl" doit pointer vers l'arrière de la base (vers la droite sur la photo), et la "jambe excentrique" de gauche doit pointer directement vers le bas. Pour ce faire, faites pivoter la "jambe excentrique" gauche "afin qu'elle pointe directement vers le bas et tourne" Torse excentrique.stl "tel qu'il pointe directement vers le bas, puis glissez le" Spur Gear (10 dents). Position entre les deux premiers "Spur Gear (10 dents) .stl". Lorsque vous glissez le point d'épinet final en position, maintenez "Excentric Leg.stl" pointant vers le bas et permettez à "Torse excentrique" de tourner en position. Fixez la position finale de Spur Gear 10 en position à l'aide d'un "Axle Gear.stl" et d'un "Axle Gear for Motor.stl". Remarque "L'ensemble d'essieu pour le moteur.stl" est installé sur le côté du montage du moteur de la base. Assurez-vous que tous les engrenages tournent librement.
Installez "Torse du bras court.stl" dans la base dans la position indiquée à l'aide de "Axle Arm Torse Short.stl". Le bras doit pivoter librement dans la base.
Installez ensuite "Arm Torse Long.stl" en position comme indiqué à l'aide de deux "Axle Arm.stl". Fixez l'extrémité du "Torse du bras long.stl" qui a un petit point sur la face du bras à "Torse excentrique.stl", et le centre à "Arm Torso Short.stl". Les engrenages doivent tourner librement après l'installation de ces bras.
Installez un "bras de bras court.stl" dans la base dans la position indiquée en utilisant un "Axle Arm.stl". Le bras doit pivoter librement dans la base.
Installez ensuite "bras de bras long.stl" en position comme indiqué à l'aide de deux "Axle Arm.stl". Fixez l'extrémité de "le bras long.stl" qui n'a pas de petit point sur le visage du bras à "excentrique la jambe.stl", et le centre à "Arm Leg Short.stl". Les engrenages doivent tourner librement après l'installation de ces bras. Répétez ce processus pour le côté restant.
Enfin, faites tourner "le pignon d'essieu pour le moteur.stl" de sorte que le trou d'arbre du moteur s'aligne sur l'arbre du moteur, puis appuyez sur le moteur en position dans la base comme indiqué.
4) Fixez le caractère à la base.
Fixez les bras de caractères à la base à l'aide de "essieu bras.stl" comme indiqué.
Fixez le torse des caractères à "Arm Torso Long.stl" à l'aide de "essieu torse.stl" comme indiqué.
Fixez les jambes des caractères aux deux "jambe de bras long.stl" en utilisant deux "armoises d'essieu.stl" comme indiqué.
Félicitations, vous avez terminé!
J'espère que vous l'appréciez!