Trofeo tulsa de fab lab en 3D para imprimir




20217 Visualizaciones 1 Me gusta 0 Descargas realizadas Descarga aqui la pieza desde 3dforprint
https://youtu.be/s-bARRh3fmM
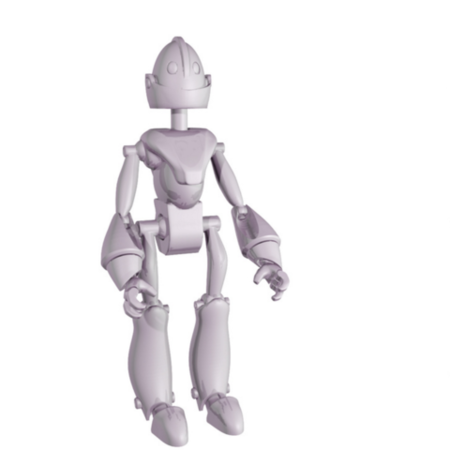
Fab Lab Tulsa invitó a nuestra familia a ser sus invitados en Tulsa Maker Faire 2019, y p...or supuesto aceptamos con mucho gusto. Al final de nuestro día en el evento, compramos camisetas y robots "dancing" muy lindos para toda la familia. "Fab Lab Tulsa Trophy" es una versión más grande, menos complicada y motorizada de los robots de baile windup que diseñé, imprimí en 3D y ensamblé para agradecer a Fab Lab Tulsa por su hospitalidad y para celebrar su éxito con Tulsa Maker Faire 2019.
Con el primer trofeo completado, todos los que lo vieron sonrieron. Así que actualizé el diseño para familiares y amigos para incluir frentes de engranajes animados y medallones personalizados / personalizables. He incluido el archivo " Medallón, En blanco.stl " a la que se puede aplicar una pegatina impresa en 2D para personalizar el trofeo.
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Diseñado con Autodesk Fusion 360, cortado con Cura 4.2 e impreso en PLA en un Ultimaker 2 + Extended y un Ultimaker 3 Extended.
He comprado las siguientes piezas:
* Motor de engranaje de 150 rpm 6VDC (búsqueda de "Motor de Engranaje ...Eléctrico del Motor de Reducción de Velocidad Micro DC 6V 150RPM").
* Un adaptador de corriente variable de 1.5, 3, 4.5, 5VDC (disponible en línea).
El archivo incluido " Partes.pdf " contiene los nombres de las piezas, cantidades, alturas de capa, relleno y configuración de soporte de las piezas impresas en 3D para este modelo. El archivo " Medallón, En Blanco.stl " contiene un medallón en blanco al que se puede aplicar una pegatina impresa en 2D para su personalización. El ".los archivos de 3mf " son para el cabezal de extrusión doble y los medallones.
Este es un modelo de impresión y montaje de alta precisión. Antes del montaje, pruebe el ajuste y el ajuste, el limado, la arena, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
El modelo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1, 8 mm por 1,25) para la limpieza de roscas.
Utilicé pequeños puntos de pegado de cianoacrilato para asegurar las roscas si era necesario, y aceite de máquina ligero para la lubricación de los engranajes y ejes.
Reúne el Cuerpo.
Para montar el cuerpo, realicé los siguientes pasos:
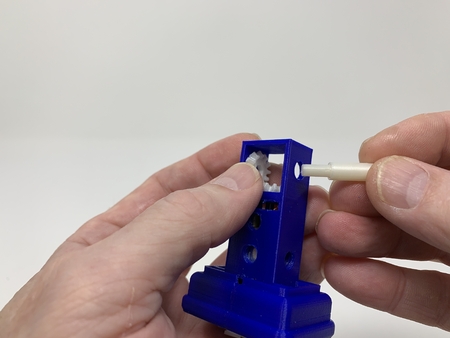
* Presionado el motor en " Cuerpo, trasero.stl " hasta que el eje del motor se extendió 3 mm por encima de la placa del engranaje del motor.
* Soldó longitudes de 120 mm de cables rojos y negros a los terminales del motor "+" y "-" respectivamente, luego usó un pequeño punto de pegado de cianoacrilato grueso para unir los cables al cuerpo para aliviar la tensión.
* Pressed " Neck.stl " en la asamblea del cuerpo.
* Prensado " Engranaje, Corona, Motor.stl " en el eje del motor.
* Posicionado " Engranaje, Corona, Eje.stl "en el conjunto del cuerpo, presionado" Eje, Leva.stl "a través del engranaje de la corona y la parte trasera del conjunto del cuerpo, a continuación, roscado" Leva.stl " en el conjunto del eje asegurándose de no apretar demasiado.
* Posicionado " Cuerpo, Frente.stl "en el conjunto del cuerpo y asegurado en su lugar con dos" Perno, Frente.stl".
Montar y Unir las Piernas.
Para montar y fijar las patas, realicé los siguientes pasos:
* Roscado un " Perno, Pierna.stl " en " Pierna, Izquierda.stl".
* Enrosque los cables del motor hacia abajo en el conjunto de la pierna izquierda y hacia fuera a través del pie.
* Se adjunta el conjunto de la pierna izquierda al conjunto del cuerpo utilizando un " Eje, Pierna.stl " asegurándose de no apretar demasiado el eje.
* Roscado el resto " Pin, Pierna.stl " en " Pierna, Derecha.stl".
* Se adjunta el conjunto de la pierna derecha al conjunto del cuerpo utilizando un " Eje, Pierna.stl " asegurándose de no apretar demasiado el eje.
* Se aseguró de que ambos conjuntos de patas giraran con facilidad.
Ensamblar y sujetar los Brazos.
Para montar y sujetar los brazos, realicé los siguientes pasos:
* Posicionado " Brazo, Izquierda, Inferior.stl "over" Brazo, Izquierda, Superior.stl "y asegurado en su lugar usando un" Perno, brazos.stl", asegurándose de no apretar demasiado el perno.
* Posicionado " Brazo, Swing.stl "sobre el conjunto del brazo y asegurado en su lugar usando un" Perno, Brazos.stl", asegurándose de no apretar demasiado el perno.
* Ató el extremo libre del oscilación del brazo al cuerpo usando un " Perno, Hombre, Largo.stl", asegurándose de no apretar demasiado el perno.
* Ató el extremo libre de la parte superior del brazo al cuerpo usando un " Perno, Hombre, Corto.stl", asegurándose de no apretar demasiado el perno.
* Repite estos pasos para el brazo derecho.
* Se aseguró de que ambos conjuntos de brazos giraran con facilidad.
Coloque la cabeza.
Para colocar la cabeza, realicé los siguientes pasos:
* Pressed " Arm, Head.stl "onto" Eje, Cuello.stl".
* Posicionado " Cabeza.3mf " en el cuello, luego enhebró el conjunto del eje a través de la cabeza y el cuello hasta que se ajustó y el brazo se colocó recto hacia abajo.
* Se aseguró de que el conjunto de la cabeza girara libremente.
Montaje Final.
Para el montaje final, realicé los siguientes pasos:
* Posicionado " Placa de Control.stl " en el conjunto del cuerpo de tal manera que ambos pasadores del brazo superior, ambos pasadores de la pierna y el pasador de la cabeza estaban ubicados en las ranuras de la placa de control.
* Eje Roscado, Placa De Control.stl " a través del agujero en la placa de control y en el conjunto del cuerpo, asegurándose de no apretar demasiado el eje y que el eje giró libremente.
* Eje Roscado, Leva.stl " a través de la ranura en la placa de control y en la leva, asegurándose de no apretar demasiado el eje.
* Enrosque el medallón en el eje de la leva, asegurándose de no apretar demasiado el medallón.
* Soldó los cables del adaptador de corriente a los cables del motor rojo y negro, luego aseguró la longitud adicional del cable dentro del pie izquierdo utilizando pequeños puntos de pegado de cianoacrilato.
Con el montaje final completo, coloqué pequeños puntos de aceite de máquina ligera en los engranajes y ejes, ajusté la fuente de alimentación a 1.5 VDC y la enchufé. Usando un amperímetro, medí el consumo de corriente de cada modelo y encontré que estaba entre 12 y 20ma.
Y así es como imprimí y ensamblé el Trofeo Tulsa de Fab Lab en 3D.
Espero que te haya gustado!
Diseñador
Greg ZumwaltDescripción del modelo 3d
Un trofeo para Fab Lab Tulsahttps://youtu.be/s-bARRh3fmM
Fab Lab Tulsa invitó a nuestra familia a ser sus invitados en Tulsa Maker Faire 2019, y p...or supuesto aceptamos con mucho gusto. Al final de nuestro día en el evento, compramos camisetas y robots "dancing" muy lindos para toda la familia. "Fab Lab Tulsa Trophy" es una versión más grande, menos complicada y motorizada de los robots de baile windup que diseñé, imprimí en 3D y ensamblé para agradecer a Fab Lab Tulsa por su hospitalidad y para celebrar su éxito con Tulsa Maker Faire 2019.
Con el primer trofeo completado, todos los que lo vieron sonrieron. Así que actualizé el diseño para familiares y amigos para incluir frentes de engranajes animados y medallones personalizados / personalizables. He incluido el archivo " Medallón, En blanco.stl " a la que se puede aplicar una pegatina impresa en 2D para personalizar el trofeo.
Como de costumbre, probablemente olvidé un archivo o dos o quién sabe qué más, así que si tiene alguna pregunta, no dude en preguntar, ya que cometo muchos errores.
Diseñado con Autodesk Fusion 360, cortado con Cura 4.2 e impreso en PLA en un Ultimaker 2 + Extended y un Ultimaker 3 Extended.
Parametros de impresión 3d
Compra, Imprime y Prepara las Piezas.He comprado las siguientes piezas:
* Motor de engranaje de 150 rpm 6VDC (búsqueda de "Motor de Engranaje ...Eléctrico del Motor de Reducción de Velocidad Micro DC 6V 150RPM").
* Un adaptador de corriente variable de 1.5, 3, 4.5, 5VDC (disponible en línea).
El archivo incluido " Partes.pdf " contiene los nombres de las piezas, cantidades, alturas de capa, relleno y configuración de soporte de las piezas impresas en 3D para este modelo. El archivo " Medallón, En Blanco.stl " contiene un medallón en blanco al que se puede aplicar una pegatina impresa en 2D para su personalización. El ".los archivos de 3mf " son para el cabezal de extrusión doble y los medallones.
Este es un modelo de impresión y montaje de alta precisión. Antes del montaje, pruebe el ajuste y el ajuste, el limado, la arena, etc. todas las partes necesarias para el movimiento suave de superficies en movimiento, y ajuste ajustado para superficies no móviles. Dependiendo de la impresora, la configuración de la impresora y los colores que elija, puede ser necesario más o menos recortar, archivar y/o lijar. Lime cuidadosamente todos los bordes que entraron en contacto con la placa de construcción para asegurarse absolutamente de que toda la placa de construcción "supura" se elimina y que todos los bordes son lisos. Utilicé pequeños archivos de joyeros y mucha paciencia para realizar este paso.
El modelo también utiliza ensamblaje roscado, por lo que utilicé un juego de grifos y troqueles (6 mm por 1, 8 mm por 1,25) para la limpieza de roscas.
Utilicé pequeños puntos de pegado de cianoacrilato para asegurar las roscas si era necesario, y aceite de máquina ligero para la lubricación de los engranajes y ejes.
Reúne el Cuerpo.
Para montar el cuerpo, realicé los siguientes pasos:
* Presionado el motor en " Cuerpo, trasero.stl " hasta que el eje del motor se extendió 3 mm por encima de la placa del engranaje del motor.
* Soldó longitudes de 120 mm de cables rojos y negros a los terminales del motor "+" y "-" respectivamente, luego usó un pequeño punto de pegado de cianoacrilato grueso para unir los cables al cuerpo para aliviar la tensión.
* Pressed " Neck.stl " en la asamblea del cuerpo.
* Prensado " Engranaje, Corona, Motor.stl " en el eje del motor.
* Posicionado " Engranaje, Corona, Eje.stl "en el conjunto del cuerpo, presionado" Eje, Leva.stl "a través del engranaje de la corona y la parte trasera del conjunto del cuerpo, a continuación, roscado" Leva.stl " en el conjunto del eje asegurándose de no apretar demasiado.
* Posicionado " Cuerpo, Frente.stl "en el conjunto del cuerpo y asegurado en su lugar con dos" Perno, Frente.stl".
Montar y Unir las Piernas.
Para montar y fijar las patas, realicé los siguientes pasos:
* Roscado un " Perno, Pierna.stl " en " Pierna, Izquierda.stl".
* Enrosque los cables del motor hacia abajo en el conjunto de la pierna izquierda y hacia fuera a través del pie.
* Se adjunta el conjunto de la pierna izquierda al conjunto del cuerpo utilizando un " Eje, Pierna.stl " asegurándose de no apretar demasiado el eje.
* Roscado el resto " Pin, Pierna.stl " en " Pierna, Derecha.stl".
* Se adjunta el conjunto de la pierna derecha al conjunto del cuerpo utilizando un " Eje, Pierna.stl " asegurándose de no apretar demasiado el eje.
* Se aseguró de que ambos conjuntos de patas giraran con facilidad.
Ensamblar y sujetar los Brazos.
Para montar y sujetar los brazos, realicé los siguientes pasos:
* Posicionado " Brazo, Izquierda, Inferior.stl "over" Brazo, Izquierda, Superior.stl "y asegurado en su lugar usando un" Perno, brazos.stl", asegurándose de no apretar demasiado el perno.
* Posicionado " Brazo, Swing.stl "sobre el conjunto del brazo y asegurado en su lugar usando un" Perno, Brazos.stl", asegurándose de no apretar demasiado el perno.
* Ató el extremo libre del oscilación del brazo al cuerpo usando un " Perno, Hombre, Largo.stl", asegurándose de no apretar demasiado el perno.
* Ató el extremo libre de la parte superior del brazo al cuerpo usando un " Perno, Hombre, Corto.stl", asegurándose de no apretar demasiado el perno.
* Repite estos pasos para el brazo derecho.
* Se aseguró de que ambos conjuntos de brazos giraran con facilidad.
Coloque la cabeza.
Para colocar la cabeza, realicé los siguientes pasos:
* Pressed " Arm, Head.stl "onto" Eje, Cuello.stl".
* Posicionado " Cabeza.3mf " en el cuello, luego enhebró el conjunto del eje a través de la cabeza y el cuello hasta que se ajustó y el brazo se colocó recto hacia abajo.
* Se aseguró de que el conjunto de la cabeza girara libremente.
Montaje Final.
Para el montaje final, realicé los siguientes pasos:
* Posicionado " Placa de Control.stl " en el conjunto del cuerpo de tal manera que ambos pasadores del brazo superior, ambos pasadores de la pierna y el pasador de la cabeza estaban ubicados en las ranuras de la placa de control.
* Eje Roscado, Placa De Control.stl " a través del agujero en la placa de control y en el conjunto del cuerpo, asegurándose de no apretar demasiado el eje y que el eje giró libremente.
* Eje Roscado, Leva.stl " a través de la ranura en la placa de control y en la leva, asegurándose de no apretar demasiado el eje.
* Enrosque el medallón en el eje de la leva, asegurándose de no apretar demasiado el medallón.
* Soldó los cables del adaptador de corriente a los cables del motor rojo y negro, luego aseguró la longitud adicional del cable dentro del pie izquierdo utilizando pequeños puntos de pegado de cianoacrilato.
Con el montaje final completo, coloqué pequeños puntos de aceite de máquina ligera en los engranajes y ejes, ajusté la fuente de alimentación a 1.5 VDC y la enchufé. Usando un amperímetro, medí el consumo de corriente de cada modelo y encontré que estaba entre 12 y 20ma.
Y así es como imprimí y ensamblé el Trofeo Tulsa de Fab Lab en 3D.
Espero que te haya gustado!