Fab lab 塔尔萨奖杯 3D打印




18404 视图 1 喜欢 0 下载 下载
https://youtu.be/s-bARRh3fmM
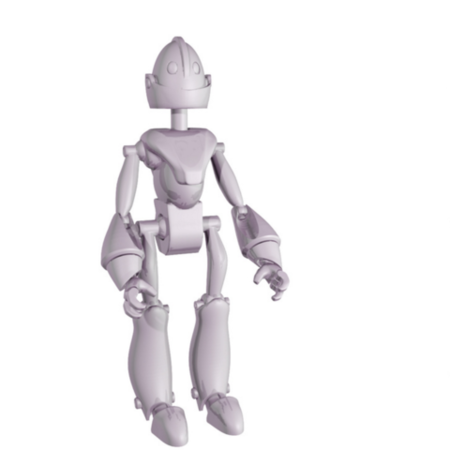
Fab Lab Tulsa 邀请我们一家作为他们 2019 年塔尔萨创客博览会的嘉宾,我们�...�然欣然接受了邀请。在活动结束时,我们为全家人购买了 T 恤和非常可爱的小型发条“跳舞”机器人。“Fab Lab Tulsa 奖杯”是我设计、3D 打印和组装的更大、更简单的电动版发条跳舞机器人,以感谢 Fab Lab Tulsa 的热情款待并庆祝他们在 2019 年塔尔萨创客博览会上取得成功。
第一个奖杯完成后,每个看到它的人都笑了。所以我为家人和朋友更新了设计,包括动画齿轮正面和定制/可定制的奖章。我附上了“Medallion, Blank.stl”文件,可以使用 2D 打印贴纸来定制奖杯。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时询问,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上使用 PLA 打印。
我购买了以下零件:
• 150rpm 6VDC 齿轮马达(搜索“DC 6V 150RPM 微型减速电机电动齿...轮马达”)。
• 一个 1.5、3、4.5、5VDC 可变电源适配器(可在线获得)。
随附文件“Parts.pdf”包含我为此模型 3D 打印的零件的零件名称、数量、层高、填充和支撑设置。文件“Medallion, Blank.stl”包含一个空白徽章,可在其上贴上 2D 打印贴纸进行定制。“.3mf”文件用于双挤出头和徽章。
这是一个高精度打印和组装模型。组装前,根据需要对所有零件进行试装和修整、锉磨、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修剪、锉削和/或打磨。仔细锉削与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
该模型还使用螺纹组装,因此我使用丝锥和板牙套件(6mm x 1,8mm x 1.25)进行螺纹清洁。
我使用小点氰基丙烯酸酯胶水来固定螺纹(如果需要),并使用轻质机油来润滑齿轮和轴。
组装车身。
为了组装车身,我执行了以下步骤:
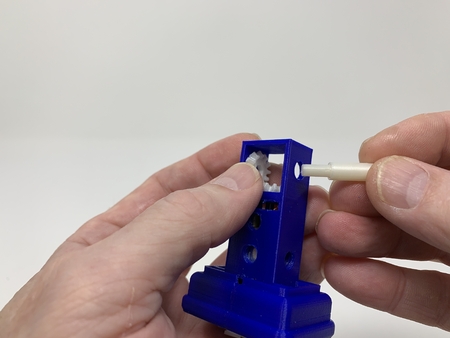
• 将电机压入“Body, Rear.stl”,直到电机轴延伸到电机齿轮板上方 3 毫米。
• 将 120 毫米长的红色和黑色电线分别焊接到电机“+”和“-”端子上,然后使用少量厚氰基丙烯酸酯胶将电线连接到机身上以消除应力。
• 将“Neck.stl”压入机体组件。
• 将“Gear, Crown, Motor.stl”压到电机轴上。
• 将“Gear, Crown, Axle.stl”定位在机体组件上,将“Axle, Cam.stl”压入冠齿轮和机体组件后部,然后将“Cam.stl”拧到轴组件上,确保不要拧得太紧。
• 将“Body, Front.stl”定位在机体组件上,并用两个“Bolt, Front.stl”固定到位。
组装并连接支腿。
为了组装和连接腿部,我执行了以下步骤:
• 将一个“Pin, Leg.stl”穿入“Leg, Left.stl”。
• 将电机线穿过左腿组件并从脚部穿出。
• 使用一个“Axle, Leg.stl”将左腿组件连接到身体组件,确保不要过度拧紧轴。
• 将剩余的“Pin, Leg.stl”穿入“Leg, Right.stl”。
• 使用一个“Axle, Leg.stl”将右腿组件连接到身体组件,确保不要过度拧紧轴。
• 确保两个腿组件都能轻松旋转。
组装和连接手臂。
为了组装和连接手臂,我执行了以下步骤:
• 将“Arm, Left,Lower.stl”放置在“Arm, Left, Upper.stl”上方,并使用一个“Bolt, Arms.stl”固定到位,确保不要将螺栓拧得过紧。
• 将“Arm, Swing.stl”放置在手臂组件上方,并使用一个“Bolt, Arms.stl”固定到位,确保不要将螺栓拧得过紧。
• 使用一个“Bolt, Shoulder, Long.stl”将手臂摆动的自由端连接到身体上,确保不要将螺栓拧得过紧。
• 使用一个“Bolt, Shoulder, Short.stl”将上臂的自由端连接到身体上,确保不要将螺栓拧得过紧。
• 对右臂重复这些步骤。
• 确保两个手臂组件都能轻松旋转。
安装头部。
为了安装头部,我执行了以下步骤:
• 将“Arm, Head.stl”按到“Axle, Neck.stl”上。
• 将“Head.3mf”放置在颈部,然后将轴组件穿过头部和颈部,直到紧贴并且手臂垂直向下。
• 确保头部组件可以自由旋转。
最终组装。
对于最终组装,我执行了以下步骤:
• 将“Control Plate.stl”放置在身体组件上,使两个上臂销、两个腿销和头部销都位于控制板槽中。
• 将“Axle, Control Plate.stl”穿过控制板上的孔并拧入身体组件,确保不要过度拧紧轴并且轴可以自由旋转。
• 将“Axle, Cam.stl”穿过控制板上的槽并拧入凸轮,确保不要过度拧紧轴。
• 将徽章拧到凸轮轴上,确保徽章不要拧得太紧。
• 将电源适配器电线焊接到红色和黑色电机电线上,然后使用小点氰基丙烯酸酯胶将多余的电线固定在左脚内。
最终组装完成后,我在齿轮和轴上涂上小点轻质机油,将电源设置为 1.5VDC 并插入电源。使用电流表,我测量了每个型号的电流消耗,发现它在 12 到 20ma 之间。
这就是我 3D 打印和组装 Fab Lab Tulsa Trophy 的方法。
希望你喜欢它!
设计师
Greg Zumwalt3D 模型描述
Fab Lab Tulsa 的奖杯https://youtu.be/s-bARRh3fmM
Fab Lab Tulsa 邀请我们一家作为他们 2019 年塔尔萨创客博览会的嘉宾,我们�...�然欣然接受了邀请。在活动结束时,我们为全家人购买了 T 恤和非常可爱的小型发条“跳舞”机器人。“Fab Lab Tulsa 奖杯”是我设计、3D 打印和组装的更大、更简单的电动版发条跳舞机器人,以感谢 Fab Lab Tulsa 的热情款待并庆祝他们在 2019 年塔尔萨创客博览会上取得成功。
第一个奖杯完成后,每个看到它的人都笑了。所以我为家人和朋友更新了设计,包括动画齿轮正面和定制/可定制的奖章。我附上了“Medallion, Blank.stl”文件,可以使用 2D 打印贴纸来定制奖杯。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时询问,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上使用 PLA 打印。
3D模型打印参数
购买、打印和准备零件。我购买了以下零件:
• 150rpm 6VDC 齿轮马达(搜索“DC 6V 150RPM 微型减速电机电动齿...轮马达”)。
• 一个 1.5、3、4.5、5VDC 可变电源适配器(可在线获得)。
随附文件“Parts.pdf”包含我为此模型 3D 打印的零件的零件名称、数量、层高、填充和支撑设置。文件“Medallion, Blank.stl”包含一个空白徽章,可在其上贴上 2D 打印贴纸进行定制。“.3mf”文件用于双挤出头和徽章。
这是一个高精度打印和组装模型。组装前,根据需要对所有零件进行试装和修整、锉磨、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修剪、锉削和/或打磨。仔细锉削与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
该模型还使用螺纹组装,因此我使用丝锥和板牙套件(6mm x 1,8mm x 1.25)进行螺纹清洁。
我使用小点氰基丙烯酸酯胶水来固定螺纹(如果需要),并使用轻质机油来润滑齿轮和轴。
组装车身。
为了组装车身,我执行了以下步骤:
• 将电机压入“Body, Rear.stl”,直到电机轴延伸到电机齿轮板上方 3 毫米。
• 将 120 毫米长的红色和黑色电线分别焊接到电机“+”和“-”端子上,然后使用少量厚氰基丙烯酸酯胶将电线连接到机身上以消除应力。
• 将“Neck.stl”压入机体组件。
• 将“Gear, Crown, Motor.stl”压到电机轴上。
• 将“Gear, Crown, Axle.stl”定位在机体组件上,将“Axle, Cam.stl”压入冠齿轮和机体组件后部,然后将“Cam.stl”拧到轴组件上,确保不要拧得太紧。
• 将“Body, Front.stl”定位在机体组件上,并用两个“Bolt, Front.stl”固定到位。
组装并连接支腿。
为了组装和连接腿部,我执行了以下步骤:
• 将一个“Pin, Leg.stl”穿入“Leg, Left.stl”。
• 将电机线穿过左腿组件并从脚部穿出。
• 使用一个“Axle, Leg.stl”将左腿组件连接到身体组件,确保不要过度拧紧轴。
• 将剩余的“Pin, Leg.stl”穿入“Leg, Right.stl”。
• 使用一个“Axle, Leg.stl”将右腿组件连接到身体组件,确保不要过度拧紧轴。
• 确保两个腿组件都能轻松旋转。
组装和连接手臂。
为了组装和连接手臂,我执行了以下步骤:
• 将“Arm, Left,Lower.stl”放置在“Arm, Left, Upper.stl”上方,并使用一个“Bolt, Arms.stl”固定到位,确保不要将螺栓拧得过紧。
• 将“Arm, Swing.stl”放置在手臂组件上方,并使用一个“Bolt, Arms.stl”固定到位,确保不要将螺栓拧得过紧。
• 使用一个“Bolt, Shoulder, Long.stl”将手臂摆动的自由端连接到身体上,确保不要将螺栓拧得过紧。
• 使用一个“Bolt, Shoulder, Short.stl”将上臂的自由端连接到身体上,确保不要将螺栓拧得过紧。
• 对右臂重复这些步骤。
• 确保两个手臂组件都能轻松旋转。
安装头部。
为了安装头部,我执行了以下步骤:
• 将“Arm, Head.stl”按到“Axle, Neck.stl”上。
• 将“Head.3mf”放置在颈部,然后将轴组件穿过头部和颈部,直到紧贴并且手臂垂直向下。
• 确保头部组件可以自由旋转。
最终组装。
对于最终组装,我执行了以下步骤:
• 将“Control Plate.stl”放置在身体组件上,使两个上臂销、两个腿销和头部销都位于控制板槽中。
• 将“Axle, Control Plate.stl”穿过控制板上的孔并拧入身体组件,确保不要过度拧紧轴并且轴可以自由旋转。
• 将“Axle, Cam.stl”穿过控制板上的槽并拧入凸轮,确保不要过度拧紧轴。
• 将徽章拧到凸轮轴上,确保徽章不要拧得太紧。
• 将电源适配器电线焊接到红色和黑色电机电线上,然后使用小点氰基丙烯酸酯胶将多余的电线固定在左脚内。
最终组装完成后,我在齿轮和轴上涂上小点轻质机油,将电源设置为 1.5VDC 并插入电源。使用电流表,我测量了每个型号的电流消耗,发现它在 12 到 20ma 之间。
这就是我 3D 打印和组装 Fab Lab Tulsa Trophy 的方法。
希望你喜欢它!