Casse-noisette walker 3d pour imprimer





11436 Vues 1 Goûts 0 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
https://youtu.be/j8txvia9yja
Rappelant un modèle de casse-noisette statique que mon père et ...moi avons créé dans Balsa Wood en utilisant l'un de mes cadeaux de Noël préférés d'enfance, la «Mattel Power Shop» (vers plus de cinquante ans), «Robotic Nutcracker Pin Walker» est une recréation imprimée en 3D dans Pin Forme Walker de la moustache laminée et des bras, des mains, du corps, des pieds et des casse-noix de tête, mon père m'a appris à utiliser mon magasin d'électricité il y a plusieurs années. Je n'ai pas pu localiser nos plans originaux, donc cette version a été recréée à partir de morceaux de souvenirs, de photographies de famille et de recherches sur Internet.
Cette récréation imprimée en 3D est conçue pour les imprimantes 3D à extrusion uniques, donc certaines pièces de détail de couleur sont filetées ou collées (j'ai utilisé la colle cyanoacrylate épaisse) en place. J'ai également conçu ce modèle pour imprimer sans nécessiter de matériau de support, mais si vous avez accès à une double imprimante d'extrusion avec PVA utilisé pour le support, "Base.stl" nécessitera beaucoup moins de nettoyage après l'impression. Le mécanisme qui propulse ce modèle est très similaire à mes conceptions de marcheur de broches précédentes dans les pièces imprimées et achetées en 3D.
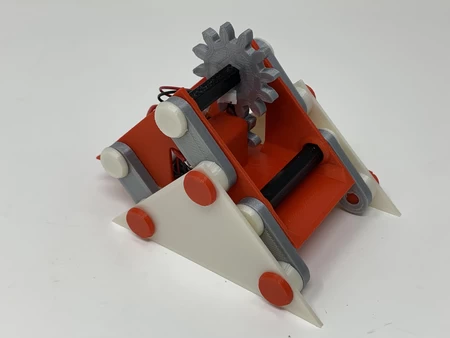
Pour la stabilité longitudinale et latérale d'un modèle de marche à broches de cette taille, il est important que le centre de masse soit situé au centre du chemin elliptique des broches (de l'avant en arrière), et centré entre les broches (à partir de gauche à droite). Comme on peut le voir au centre des images de masse tel que calculé par Autodesk Fusion 360, le centre de masse de ce modèle à la fois d'avant en arrière et côté à côté satisfait à ces conditions, mais est légèrement supérieur, j'ai donc utilisé un moteur de vitesse RPM inférieur dans la conception d'une stabilité accrue. Avec la batterie et le moteur d'engrenage que j'ai sélectionnés pour ce modèle, la consommation d'énergie moyenne est d'environ 16 mA, donc elle devrait fonctionner quelques heures avant d'avoir besoin d'une recharge.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Une dernière note, je ne reçois aucune compensation sous quelque forme que ce soit pour la conception, l'équipement, les pièces et / ou les matériaux utilisés dans ce modèle.
Oh et une dernière note finale, de Lora et moi et de toute notre famille, à vous et aux vôtres, joyeux Noël!
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.4.0 et imprimé dans PLA sur un Ultimaker 2+ étendu, un Ultimaker 3 étendu et un Ultimaker S5.
J'ai acquis les parties suivantes pour ce modèle:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
�...� Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 74 tr / min.
• Un micro-commutateur (Uxcell A12013100UX0116 Bouton haut 3P 2 Position 1P2T SPDT VERTICAL • Interrupteur de diapositive, 0,5 ampère, 50v DC, 50 pièces, 3 mm).
Vous aurez également besoin d'un chargeur de batterie approprié.
J'ai imprimé les parties suivantes en PLA à une hauteur de couche de 0,15 mm avec 20% de remplissage (sauf indication contraire) et aucun support:
• Deux "essieu, corps.stl", blanc.
• Deux "essieu, broche.stl", blanc.
• Un "essieu, SeeSaw.stl".
• quatre "band.stl", jaune.
• Une "base.stl" à l'aide de l'option Cura 4.4.0 "Infilt progressive", noir avec support PVA en option.
• Une "ceinture.stl", noir.
• Deux "boulon, épaule.stl", jaune.
• Un "boucle.stl", jaune.
• Six "Button.stl", jaune.
• Une "came et axe.stl", blanc.
• Un "cam.stl", blanc.
• Deux "coiffe", vert.
• Un "œil, gauche.stl", noir.
• Un "œil, à droite.stl", noir.
• Un "sourcil, gauche.stl", jaune.
• Un "sourcil, à droite.stl", jaune.
• Un "Gear, Crown, Axle.stl", blanc.
• Un "équipement, couronne, moteur.stl", blanc.
• deux "hand.stl", blanc.
• Un "chapeau, bouton de médaillon.stl", jaune.
• Un "chapeau, médaillon.stl", jaune.
• Un "chapeau, pin.stl", noir.
• Un "hat.stl" en utilisant l'option Cura 4.4.0 "Gradual Infill", noir.
• Un "head.stl", blanc.
• Une "bande de jambe, gauche.stl", jaune. •
• Une "bande de jambe, à droite.stl", jaune.
• Un "moustache.stl", jaune.
• Deux "broches", blancs.
• Un "SeeSaw.stl", blanc.
• Un "épaule.stl", jaune.
• Un "torse, inférieur.stl", rouge.
• Un "torse, supérieur.stl", rouge.
Ce modèle est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées 3D de très petite précision dans des espaces confinés. Avant l'assemblage, le test d'ajustement et de garniture, de fichier, de foret, de sable, etc. Toutes les pièces nécessaires pour un mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce modèle utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
Assemblez le chapeau.
Pour assembler le chapeau, j'ai effectué les étapes suivantes:
• Appuyez sur "Hat, Button Medallion.stl" dans "hat.stl".
• Collé "chapeau, médaillon.stl" à l'assemblage du chapeau.
• Cloré "chapeau, broche.stl" à l'assemblage du chapeau.
Assemblez la tête.
Pour assembler la tête, j'ai effectué les étapes suivantes:
• pressé et collé "Eye, droite.stl", "Eye, Left.stl", "SEEBROW, Droite.stl" et "Mever Left.stl" dans "head.stl".
• collé "moustache.stl" sur l'assemblage sous le nez.
Fixez l'ensemble du chapeau à l'ensemble de la tête.
Pour fixer l'ensemble du chapeau à l'ensemble de la tête, en utilisant la broche du chapeau comme guide de centrage, j'ai collé les deux assemblages ensemble.
Assemblez le corps.
Pour assembler le corps, j'ai effectué les étapes suivantes:
• Appuyé sur quatre "Button.stl" dans "Torse, Upper.stl".
• Appuyez sur "Buckle.stl" sur "Belt.stl".
• Faire glisser l'ensemble de la courroie sur l'ensemble du torse alignant les fentes dans l'ensemble de la courroie avec les jambes de l'ensemble du torse.
• Appuyez sur "épaules.stl" sur l'assemblage du torse.
• Placé un "Band.stl" sur l'une des jambes de l'assemblage du torse.
• Glissé un "boulon, épaule.stl" à travers l'épaule, le torse et la bande.
• Placé un "Band.stl" sur la jambe restante de l'assemblage du torse.
• Gliez le "boulon restant" devrait.stl "à travers l'épaule, le torse et la bande.
• Placez un "coiffe" sur chacun des boulons de l'épaule.
Tirez le moteur, l'interrupteur et le connecteur JST.
Pour câbler le moteur, l'interrupteur et le connecteur JST, j'ai effectué les étapes suivantes:
• Coupez le fil noir sur le connecteur JST à 20 mm de longueur, dépouillé et étanche de l'extrémité, et soudent-le à la borne centrale de l'interrupteur.
• Têtu et en conserve les extrémités de la section 80 mm restante du fil noir, et l'a soudée à partir d'une borne extérieure de l'interrupteur à la borne du moteur "-".
• Souder le fil rouge du connecteur JST à la borne "+" du moteur.
Après le câblage, j'ai connecté la batterie au connecteur JST, allumé l'interrupteur et vérifié que l'arbre du moteur tournait dans le sens des aiguilles d'une montre comme vu à partir de l'extrémité de l'arbre du moteur du moteur (sinon, j'ai inversé le câblage du moteur). J'ai ensuite éteint l'interrupteur et déconnecté la batterie.
Assemblez la base.
Pour assembler la base, j'ai effectué les étapes suivantes:
• Appuyez sur les deux autres "Button.stl" dans "Torse, Lower.stl".
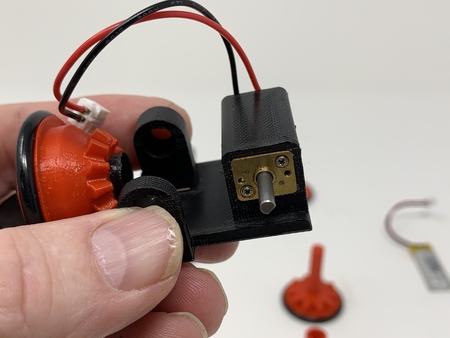
• Appuyez sur le moteur en position du côté des pieds de "base.stl" de sorte que l'arbre du moteur était à 3 mm au-dessus de la surface de la plaque de vitesse de la couronne du moteur.
• Positionné l'assemblage du torse sur l'ensemble de base (centré sur les trous inférieurs de la base de l'assemblage de basse, les boutons vers l'avant), puis le fixaient en place en utilisant les deux "essieu, body.stl", s'assurant que le torse inférieur se balançait librement sur les essieux .
• Exécuter l'interrupteur, le connecteur JST et les fils à travers le torse inférieur, puis appuyé sur l'interrupteur dans le torse inférieur.
• Appuyez sur "Gear, Crown, Motor.stl" sur la tige du moteur exposée rincer avec l'extrémité et fixé en place avec un petit point de colle cyanoacrylate.
• Positionné "Gear, couronne, essieu.stl" À l'intérieur de l'assemblage de base sur le trou d'essieu plus petit.
• Faire glisser l'arbre hexagonal de "CAM AND AXLE.STL" dans l'assemblage de base plus grand trou d'essieu.
• Appuyez sur l'arbre de l'essieu hexagonal à travers l'équipement de l'essieu et en dehors du plus petit trou d'essieu dans l'ensemble de base (cela doit être un ajustement serré, sinon, j'ai ajouté un petit point de colle cyanoacrylate).
• Appuyez sur "Cam.stl" sur l'extrémité de l'arbre hexagonal de l'essieu de l'essieu de telle sorte que la came soit à 180 degrés du composant "CAM et AXLE.STL" (cela doit être un ajustement serré, sinon, j'ai ajouté un petit point de point de Cyanoacrylate de colle).
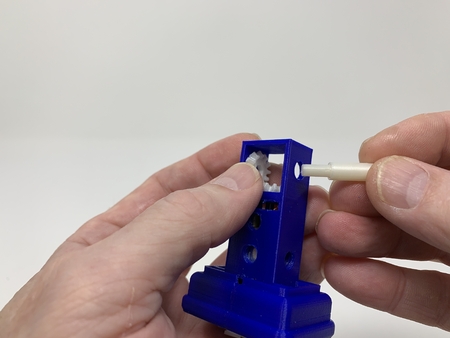
• Glissa une "broche" dans l'assemblage de base et positionné l'anneau de came sur la came puis fixé en place avec un "essieu, broche.stl".
• Gliez la "broche.stl" restante dans l'assemblage de base et positionné l'anneau de came sur la came puis fixé en place avec le "essieu, Pin.stl" restant.
• Affait le moteur à la main jusqu'à ce que les épingles de jambe soient de niveau (une came directe en avant, restant droit vers l'arrière).
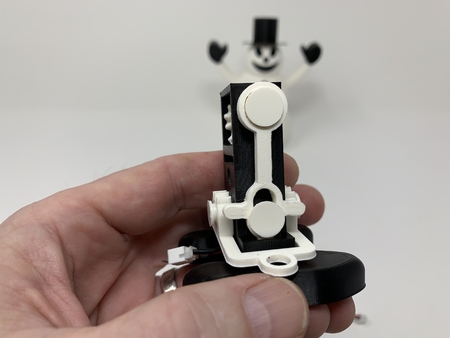
• Positionné "Seesaw.stl" sur le trou fileté supérieur sur l'assemblage de la base et fixé en place avec "essieu, bascule.stl", en s'assurant que les deux dents du centre de la bascule ont entouré la dent centrale de l'équipement du torse inférieur.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• fixé la batterie en place à l'aide du ruban adhésif double face, puis a branché la batterie dans le connecteur JST.
• Tout en maintenant l'ensemble du corps à l'envers, glissant l'assemblage de base dans l'assemblage du corps.
• Positionné une "bande.stl" sur le boulon de l'épaule dans l'assemblage du corps, alignant la bande avec le contour du torse de base.
• Positionné une "main.stl" sur les filetages du boulon d'épaule dans l'ensemble du corps avec la poignée sur le torse et fixé en place en tournant le boulon à épaule dans le sens horaire (le boulon, le torse supérieur, la bande, la manche, la bande et la forme de la main un mécanisme "vice" qui sécurise l'assemblage de base à l'assemblage du corps).
• Répétit l'étape précédente pour la main restante.
• fixé la tête vers l'assemblage à l'aide de petits points de colle cyanoacrylate.
• Sécurisé les deux "Band des jambes, gauche.stl" et "Band de jambe, droite.stl" à la base en utilisant de petits points de colle cyanoacrylate.
• A allumé la puissance, et hors de ce casse-noisette est allé à la marche!
Et c'est comme ça que j'ai imprimé en 3D et assemblé la marche du noix de casse-noisette.
J'espère que vous l'avez apprécié!
Designer
Greg ZumwaltDescription du modèle 3D
Un piétinement à épingle en tenue de casse-noisette.https://youtu.be/j8txvia9yja
Rappelant un modèle de casse-noisette statique que mon père et ...moi avons créé dans Balsa Wood en utilisant l'un de mes cadeaux de Noël préférés d'enfance, la «Mattel Power Shop» (vers plus de cinquante ans), «Robotic Nutcracker Pin Walker» est une recréation imprimée en 3D dans Pin Forme Walker de la moustache laminée et des bras, des mains, du corps, des pieds et des casse-noix de tête, mon père m'a appris à utiliser mon magasin d'électricité il y a plusieurs années. Je n'ai pas pu localiser nos plans originaux, donc cette version a été recréée à partir de morceaux de souvenirs, de photographies de famille et de recherches sur Internet.
Cette récréation imprimée en 3D est conçue pour les imprimantes 3D à extrusion uniques, donc certaines pièces de détail de couleur sont filetées ou collées (j'ai utilisé la colle cyanoacrylate épaisse) en place. J'ai également conçu ce modèle pour imprimer sans nécessiter de matériau de support, mais si vous avez accès à une double imprimante d'extrusion avec PVA utilisé pour le support, "Base.stl" nécessitera beaucoup moins de nettoyage après l'impression. Le mécanisme qui propulse ce modèle est très similaire à mes conceptions de marcheur de broches précédentes dans les pièces imprimées et achetées en 3D.
Pour la stabilité longitudinale et latérale d'un modèle de marche à broches de cette taille, il est important que le centre de masse soit situé au centre du chemin elliptique des broches (de l'avant en arrière), et centré entre les broches (à partir de gauche à droite). Comme on peut le voir au centre des images de masse tel que calculé par Autodesk Fusion 360, le centre de masse de ce modèle à la fois d'avant en arrière et côté à côté satisfait à ces conditions, mais est légèrement supérieur, j'ai donc utilisé un moteur de vitesse RPM inférieur dans la conception d'une stabilité accrue. Avec la batterie et le moteur d'engrenage que j'ai sélectionnés pour ce modèle, la consommation d'énergie moyenne est d'environ 16 mA, donc elle devrait fonctionner quelques heures avant d'avoir besoin d'une recharge.
Comme d'habitude, j'ai probablement oublié un fichier ou deux ou qui sait quoi d'autre, donc si vous avez des questions, n'hésitez pas à demander car je fais beaucoup d'erreurs.
Une dernière note, je ne reçois aucune compensation sous quelque forme que ce soit pour la conception, l'équipement, les pièces et / ou les matériaux utilisés dans ce modèle.
Oh et une dernière note finale, de Lora et moi et de toute notre famille, à vous et aux vôtres, joyeux Noël!
Conçu en utilisant Autodesk Fusion 360, tranché à l'aide de Cura 4.4.0 et imprimé dans PLA sur un Ultimaker 2+ étendu, un Ultimaker 3 étendu et un Ultimaker S5.
Paramètres d'impression du modèle 3D
Parties.J'ai acquis les parties suivantes pour ce modèle:
• Une batterie au lithium de 3,7 VDC 100mA (https://www.adafruit.com/product/1570).
�...� Un câble JST PH 2-PIN (https://www.adafruit.com/product/3814).
• Un moteur d'engrenage N20 6VDC 74 tr / min.
• Un micro-commutateur (Uxcell A12013100UX0116 Bouton haut 3P 2 Position 1P2T SPDT VERTICAL • Interrupteur de diapositive, 0,5 ampère, 50v DC, 50 pièces, 3 mm).
Vous aurez également besoin d'un chargeur de batterie approprié.
J'ai imprimé les parties suivantes en PLA à une hauteur de couche de 0,15 mm avec 20% de remplissage (sauf indication contraire) et aucun support:
• Deux "essieu, corps.stl", blanc.
• Deux "essieu, broche.stl", blanc.
• Un "essieu, SeeSaw.stl".
• quatre "band.stl", jaune.
• Une "base.stl" à l'aide de l'option Cura 4.4.0 "Infilt progressive", noir avec support PVA en option.
• Une "ceinture.stl", noir.
• Deux "boulon, épaule.stl", jaune.
• Un "boucle.stl", jaune.
• Six "Button.stl", jaune.
• Une "came et axe.stl", blanc.
• Un "cam.stl", blanc.
• Deux "coiffe", vert.
• Un "œil, gauche.stl", noir.
• Un "œil, à droite.stl", noir.
• Un "sourcil, gauche.stl", jaune.
• Un "sourcil, à droite.stl", jaune.
• Un "Gear, Crown, Axle.stl", blanc.
• Un "équipement, couronne, moteur.stl", blanc.
• deux "hand.stl", blanc.
• Un "chapeau, bouton de médaillon.stl", jaune.
• Un "chapeau, médaillon.stl", jaune.
• Un "chapeau, pin.stl", noir.
• Un "hat.stl" en utilisant l'option Cura 4.4.0 "Gradual Infill", noir.
• Un "head.stl", blanc.
• Une "bande de jambe, gauche.stl", jaune. •
• Une "bande de jambe, à droite.stl", jaune.
• Un "moustache.stl", jaune.
• Deux "broches", blancs.
• Un "SeeSaw.stl", blanc.
• Un "épaule.stl", jaune.
• Un "torse, inférieur.stl", rouge.
• Un "torse, supérieur.stl", rouge.
Ce modèle est un imprimé et un assemblage de haute précision en utilisant des pièces imprimées 3D de très petite précision dans des espaces confinés. Avant l'assemblage, le test d'ajustement et de garniture, de fichier, de foret, de sable, etc. Toutes les pièces nécessaires pour un mouvement lisse des surfaces mobiles et un ajustement serré pour les surfaces non mobiles. Selon votre imprimante, les paramètres de votre imprimante et les couleurs que vous avez choisis, plus ou moins la coupe, le dépôt et / ou le ponçage peuvent être nécessaires. Déposer soigneusement tous les bords qui ont contacté la plaque de construction pour rendre absolument certain que toutes les plaques de construction "suintement" sont supprimées et que tous les bords sont lisses. J'ai utilisé de petits fichiers de bijoutiers et beaucoup de patience pour effectuer cette étape.
Ce modèle utilise également un assemblage fileté, j'ai donc utilisé un jeu de robinet et de matrice (6 mm par 1) pour le nettoyage des filetages.
Assemblez le chapeau.
Pour assembler le chapeau, j'ai effectué les étapes suivantes:
• Appuyez sur "Hat, Button Medallion.stl" dans "hat.stl".
• Collé "chapeau, médaillon.stl" à l'assemblage du chapeau.
• Cloré "chapeau, broche.stl" à l'assemblage du chapeau.
Assemblez la tête.
Pour assembler la tête, j'ai effectué les étapes suivantes:
• pressé et collé "Eye, droite.stl", "Eye, Left.stl", "SEEBROW, Droite.stl" et "Mever Left.stl" dans "head.stl".
• collé "moustache.stl" sur l'assemblage sous le nez.
Fixez l'ensemble du chapeau à l'ensemble de la tête.
Pour fixer l'ensemble du chapeau à l'ensemble de la tête, en utilisant la broche du chapeau comme guide de centrage, j'ai collé les deux assemblages ensemble.
Assemblez le corps.
Pour assembler le corps, j'ai effectué les étapes suivantes:
• Appuyé sur quatre "Button.stl" dans "Torse, Upper.stl".
• Appuyez sur "Buckle.stl" sur "Belt.stl".
• Faire glisser l'ensemble de la courroie sur l'ensemble du torse alignant les fentes dans l'ensemble de la courroie avec les jambes de l'ensemble du torse.
• Appuyez sur "épaules.stl" sur l'assemblage du torse.
• Placé un "Band.stl" sur l'une des jambes de l'assemblage du torse.
• Glissé un "boulon, épaule.stl" à travers l'épaule, le torse et la bande.
• Placé un "Band.stl" sur la jambe restante de l'assemblage du torse.
• Gliez le "boulon restant" devrait.stl "à travers l'épaule, le torse et la bande.
• Placez un "coiffe" sur chacun des boulons de l'épaule.
Tirez le moteur, l'interrupteur et le connecteur JST.
Pour câbler le moteur, l'interrupteur et le connecteur JST, j'ai effectué les étapes suivantes:
• Coupez le fil noir sur le connecteur JST à 20 mm de longueur, dépouillé et étanche de l'extrémité, et soudent-le à la borne centrale de l'interrupteur.
• Têtu et en conserve les extrémités de la section 80 mm restante du fil noir, et l'a soudée à partir d'une borne extérieure de l'interrupteur à la borne du moteur "-".
• Souder le fil rouge du connecteur JST à la borne "+" du moteur.
Après le câblage, j'ai connecté la batterie au connecteur JST, allumé l'interrupteur et vérifié que l'arbre du moteur tournait dans le sens des aiguilles d'une montre comme vu à partir de l'extrémité de l'arbre du moteur du moteur (sinon, j'ai inversé le câblage du moteur). J'ai ensuite éteint l'interrupteur et déconnecté la batterie.
Assemblez la base.
Pour assembler la base, j'ai effectué les étapes suivantes:
• Appuyez sur les deux autres "Button.stl" dans "Torse, Lower.stl".
• Appuyez sur le moteur en position du côté des pieds de "base.stl" de sorte que l'arbre du moteur était à 3 mm au-dessus de la surface de la plaque de vitesse de la couronne du moteur.
• Positionné l'assemblage du torse sur l'ensemble de base (centré sur les trous inférieurs de la base de l'assemblage de basse, les boutons vers l'avant), puis le fixaient en place en utilisant les deux "essieu, body.stl", s'assurant que le torse inférieur se balançait librement sur les essieux .
• Exécuter l'interrupteur, le connecteur JST et les fils à travers le torse inférieur, puis appuyé sur l'interrupteur dans le torse inférieur.
• Appuyez sur "Gear, Crown, Motor.stl" sur la tige du moteur exposée rincer avec l'extrémité et fixé en place avec un petit point de colle cyanoacrylate.
• Positionné "Gear, couronne, essieu.stl" À l'intérieur de l'assemblage de base sur le trou d'essieu plus petit.
• Faire glisser l'arbre hexagonal de "CAM AND AXLE.STL" dans l'assemblage de base plus grand trou d'essieu.
• Appuyez sur l'arbre de l'essieu hexagonal à travers l'équipement de l'essieu et en dehors du plus petit trou d'essieu dans l'ensemble de base (cela doit être un ajustement serré, sinon, j'ai ajouté un petit point de colle cyanoacrylate).
• Appuyez sur "Cam.stl" sur l'extrémité de l'arbre hexagonal de l'essieu de l'essieu de telle sorte que la came soit à 180 degrés du composant "CAM et AXLE.STL" (cela doit être un ajustement serré, sinon, j'ai ajouté un petit point de point de Cyanoacrylate de colle).
• Glissa une "broche" dans l'assemblage de base et positionné l'anneau de came sur la came puis fixé en place avec un "essieu, broche.stl".
• Gliez la "broche.stl" restante dans l'assemblage de base et positionné l'anneau de came sur la came puis fixé en place avec le "essieu, Pin.stl" restant.
• Affait le moteur à la main jusqu'à ce que les épingles de jambe soient de niveau (une came directe en avant, restant droit vers l'arrière).
• Positionné "Seesaw.stl" sur le trou fileté supérieur sur l'assemblage de la base et fixé en place avec "essieu, bascule.stl", en s'assurant que les deux dents du centre de la bascule ont entouré la dent centrale de l'équipement du torse inférieur.
Assemblage final.
Pour l'assemblage final, j'ai effectué les étapes suivantes:
• fixé la batterie en place à l'aide du ruban adhésif double face, puis a branché la batterie dans le connecteur JST.
• Tout en maintenant l'ensemble du corps à l'envers, glissant l'assemblage de base dans l'assemblage du corps.
• Positionné une "bande.stl" sur le boulon de l'épaule dans l'assemblage du corps, alignant la bande avec le contour du torse de base.
• Positionné une "main.stl" sur les filetages du boulon d'épaule dans l'ensemble du corps avec la poignée sur le torse et fixé en place en tournant le boulon à épaule dans le sens horaire (le boulon, le torse supérieur, la bande, la manche, la bande et la forme de la main un mécanisme "vice" qui sécurise l'assemblage de base à l'assemblage du corps).
• Répétit l'étape précédente pour la main restante.
• fixé la tête vers l'assemblage à l'aide de petits points de colle cyanoacrylate.
• Sécurisé les deux "Band des jambes, gauche.stl" et "Band de jambe, droite.stl" à la base en utilisant de petits points de colle cyanoacrylate.
• A allumé la puissance, et hors de ce casse-noisette est allé à la marche!
Et c'est comme ça que j'ai imprimé en 3D et assemblé la marche du noix de casse-noisette.
J'espère que vous l'avez apprécié!