胡桃夹子别针步行器 3D打印





11661 视图 1 喜欢 0 下载 下载
https://youtu.be/j8txVIA9YJA
“机器人胡桃夹子针行者”让人想起我和父亲用我最喜欢的童...年圣诞礼物之一“美泰动力商店”(大约五十多年前)用轻木制作的静态胡桃夹子模型,“机器人胡桃夹子针行者”是一个 3D 打印的针行者形式的复制品,上面有层压胡须和车床加工的手臂、手、身体、脚和头部胡桃夹子,我父亲多年前教我如何使用我的动力商店进行铣削。我无法找到我们最初的计划,因此这个版本是根据记忆的点点滴滴、家庭照片和互联网搜索重新创建的。
这个 3D 打印的复制品是为单挤出 3D 打印机设计的,因此一些彩色细节件被穿入或粘合(我使用了厚氰基丙烯酸酯胶)到位。我还设计了此模型,使其无需支撑材料即可打印,但是,如果您可以使用以 PVA 为支撑的双挤出打印机,“Base.stl”打印后需要的清理工作将少得多。推动此模型的机制与我之前的销钉行走器设计非常相似,无论是 3D 打印部件还是购买部件。
对于这种尺寸的销钉行走模型的纵向和横向稳定性,重要的是质心位于销钉椭圆路径的中心(从前到后)上方,并位于销钉之间的中心(从左到右)。从 Autodesk Fusion 360 计算出的质心图像中可以看出,此模型的前后和左右质心都满足这些条件,但略微上重,因此我在设计中使用了较低转速的齿轮马达来提高稳定性。使用我为此模型选择的电池和齿轮马达,平均功耗约为 16MA,因此它应该可以运行几个小时才需要充电。
和往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时提问,因为我确实犯了很多错误。
最后说明一下,我不会以任何形式获得此模型中使用的设计、设备、零件和/或材料的报酬。
哦,还有最后一点,来自 Lora 和我以及我们全家,祝您和您的家人圣诞快乐!
使用 Autodesk Fusion 360 设计,使用 Cura 4.4.0 切片,并在 Ultimaker 2+ Extended、Ultimaker 3 Extended 和 Ultimaker S5 上以 PLA 打印。
我为该模型购买了以下零件:
• 一块 3.7vdc 100ma 锂电池 (https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 �...��电缆 (https://www.adafruit.com/product/3814)。
• 一个 N20 6VDC 74RPM 齿轮马达。
• 一个微动开关 (Uxcell a12013100ux0116 高旋钮 3P 2 位置 1P2T SPDT 垂直 • 滑动开关,0.5 安培,50V DC,50 件,3 毫米)。
您还需要一个合适的电池充电器。
我用 PLA 以 0.15 毫米层高 3D 打印了以下零件,填充率为 20%(除非另有说明)且没有支撑:
• 两个“Axle, Body.stl”,白色。
• 两个“Axle, Pin.stl”,白色。
• 一个“Axle, Seesaw.stl”。
• 四个“Band.stl”,黄色。
• 一个“Base.stl”,使用 Cura 4.4.0“Gradual Infill”选项,黑色,带有可选的 PVA 支持。
• 一个“Belt.stl”,黑色。
• 两个“Bolt, Shoulder.stl”,黄色。
• 一个“Buckle.stl”,黄色。
• 六个“Button.stl”,黄色。
• 一个“Cam And Axle.stl”,白色。
• 一个“Cam.stl”,白色。
• 两个“Cuff.stl”,绿色。
• 一个“Eye, Left.stl”,黑色。
• 一个“Eye, Right.stl”,黑色。
• 一个“Eyebrow, Left.stl”,黄色。
• 一个“Eyebrow, Right.stl”,黄色。
• 一个“Gear, Crown, Axle.stl”,白色。
• 一个“Gear, Crown, Motor.stl”,白色。
• 两个“Hand.stl”,白色。
• 一个“Hat, Medallion Button.stl”,黄色。
• 一个“Hat, Medallion.stl”,黄色。
• 一个“Hat, Pin.stl”,黑色。
• 一个“Hat.stl”,使用 Cura 4.4.0“Gradual Infill”选项,黑色。
• 一个“Head.stl”,白色。
• 一个“Leg Band, Left.stl”,黄色。•
• 一个“Leg Band, Right.stl”,黄色。
• 一个“Mustache.stl”,黄色。
• 两个“Pin”,白色。
• 一个“Seesaw.stl”,白色。
• 一个“Shoulders.stl”,黄色。
• 一个“Torso, Lower.stl”,红色。
• 一个“Torso, Upper.stl”,红色。
该模型是高精度打印和组装,有时在狭窄空间内使用非常小的精度 3D 打印部件。组装前,对所有部件进行试装和修整、锉平、钻孔、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
此模型还使用螺纹组装,因此我使用丝锥和板牙套装(6mm x 1)清洁螺纹。
组装帽子。
为了组装帽子,我执行了以下步骤:
• 将“Hat, Medallion Button.stl”压入“Hat.stl”。
• 将“Hat, Medallion.stl”粘到帽子组件上。
• 将“Hat, Pin.stl”粘到帽子组件上。
组装头部。
为了组装头部,我执行了以下步骤:
• 将“Eye, Right.stl”、“Eye, Left.stl”、“Eyebrow, Right.stl”和“Eyebrow Left.stl”按压并粘贴到“Head.stl”中。
• 将“Mustache.stl”粘贴到鼻子下方的组件上。
将帽子组件连接到头部组件。
为了将帽子组件连接到头部组件,我使用帽针作为定心引导,将两个组件粘在一起。
组装身体。
为了组装身体,我执行了以下步骤:
• 将四个“Button.stl”按压到“Torso, Upper.stl”中。
• 将“Buckle.stl”按压到“Belt.stl”上。
• 将皮带组件滑到躯干组件上,将皮带组件中的插槽与躯干组件上的腿对齐。
• 将“Shoulders.stl”压到躯干组件上。
• 将一个“Band.stl”放在躯干组件的一条腿上。
• 将一个“Bolt, Shoulder.stl”向上滑过肩部、躯干和带子。
• 将一个“Band.stl”放在躯干组件的剩余一条腿上。
• 将剩余的“Bolt, Shoulder.stl”向上滑过肩部、躯干和带子。
• 将一个“Cuff.stl”放在每个肩部螺栓上。
连接电机、开关和 JST 连接器。
为了连接电机、开关和 JST 连接器,我执行了以下步骤:
• 将 JST 连接器上的黑线剪至 20 毫米长,剥去末端的皮并镀锡,然后将其焊接到开关的中心端子上。
• 将剩余 80 毫米长的黑线末端跳线并镀锡,然后将其从开关的一个外部端子焊接到“-”电机端子。
• 将 JST 连接器的红线焊接到电机“+”端子。
接线后,我将电池连接到 JST 连接器,打开开关,并验证从电机轴端看电机轴是否顺时针旋转(如果不是,我反转了电机接线)。然后我关闭开关并断开电池。
组装底座。
要组装底座,我执行了以下步骤:
• 将剩余的两个“Button.stl”按入“Torso, Lower.stl”。
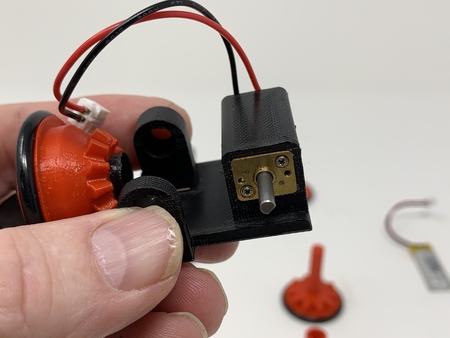
• 将电机从“Base.stl”的脚侧向上按入位置,使电机轴高出电机冠齿轮板表面 3 毫米。
• 将躯干组件放置在底座组件上(位于低音组件底座下孔上方的中心,按钮朝前),然后使用“Axle, Body.stl”将其固定到位,确保下半身在轴上自由摆动。
• 将开关、JST 连接器和电线穿过下半身组件,然后将开关压入下半身。
• 将“Gear, Crown, Motor.stl”压在裸露的电机轴上,与末端齐平,并用一小点氰基丙烯酸酯胶固定到位。
• 将“Gear, Crown, Axle.stl”放置在底座组件内较小的轴孔上方。
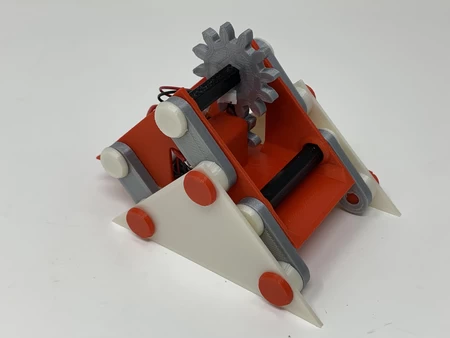
• 将“Cam and Axle.stl”的六角轴滑入底座组件较大的轴孔。
• 将六角轴轴穿过轴齿轮并从底座组件中较小的轴孔中压出(这必须是紧密配合,如果不是,我加了一小点氰基丙烯酸酯胶)。
• 将“Cam.stl”压到轴组件的六角轴端,使凸轮与“Cam And Axle.stl”组件成 180 度角(这必须紧密配合,如果不是,我添加了一小点氰基丙烯酸酯胶)。
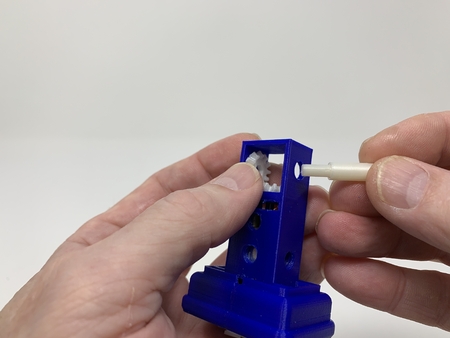
• 将一个“Pin”滑入底座组件,并将凸轮环放置在凸轮上,然后用一个“Axle, Pin.stl”固定到位。
• 将剩余的“Pin.stl”滑入底座组件,并将凸轮环放置在凸轮上,然后用剩余的“Axle, Pin.stl”固定到位。
• 用手旋转电机齿轮,直到腿部销钉水平(一个凸轮笔直向前,其余凸轮笔直向后)。
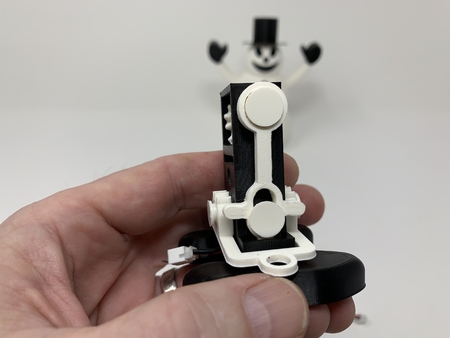
• 将“Seesaw.stl”放置在底座组件的上部螺纹孔上,并用“Axle, Seesaw.stl”固定到位,确保跷跷板的中心两个齿围绕着下躯干齿轮的中心齿。
最终组装。
对于最终组装,我执行了以下步骤:
• 使用双面胶带将电池固定到位,然后将电池插入 JST 连接器。
• 将身体组件倒置,将底座组件滑入身体组件。
• 将一个“Band.stl”放置在身体组件的肩部螺栓上,将带子与底部躯干的轮廓对齐。
• 将一个“Hand.stl”放置在身体组件的肩部螺栓的螺纹上,将手柄放在躯干上,并通过顺时针旋转肩部螺栓将其固定到位(螺栓、上躯干、带子、袖口、带子和手形成一个“虎钳”机制,将底座组件固定到身体组件上)。
• 对剩下的手重复上一步。
• 使用小点氰基丙烯酸酯胶将头部固定到组件上。
• 使用小点氰基丙烯酸酯胶将两个“Leg Band, Left.stl”和“Leg Band, Right.stl”固定到底座上。
• 打开电源,胡桃夹子开始走针!
这就是我 3D 打印和组装胡桃夹子走针器的方法。
希望你喜欢它!
设计师
Greg Zumwalt3D 模型描述
穿着胡桃夹子服装的针行者。https://youtu.be/j8txVIA9YJA
“机器人胡桃夹子针行者”让人想起我和父亲用我最喜欢的童...年圣诞礼物之一“美泰动力商店”(大约五十多年前)用轻木制作的静态胡桃夹子模型,“机器人胡桃夹子针行者”是一个 3D 打印的针行者形式的复制品,上面有层压胡须和车床加工的手臂、手、身体、脚和头部胡桃夹子,我父亲多年前教我如何使用我的动力商店进行铣削。我无法找到我们最初的计划,因此这个版本是根据记忆的点点滴滴、家庭照片和互联网搜索重新创建的。
这个 3D 打印的复制品是为单挤出 3D 打印机设计的,因此一些彩色细节件被穿入或粘合(我使用了厚氰基丙烯酸酯胶)到位。我还设计了此模型,使其无需支撑材料即可打印,但是,如果您可以使用以 PVA 为支撑的双挤出打印机,“Base.stl”打印后需要的清理工作将少得多。推动此模型的机制与我之前的销钉行走器设计非常相似,无论是 3D 打印部件还是购买部件。
对于这种尺寸的销钉行走模型的纵向和横向稳定性,重要的是质心位于销钉椭圆路径的中心(从前到后)上方,并位于销钉之间的中心(从左到右)。从 Autodesk Fusion 360 计算出的质心图像中可以看出,此模型的前后和左右质心都满足这些条件,但略微上重,因此我在设计中使用了较低转速的齿轮马达来提高稳定性。使用我为此模型选择的电池和齿轮马达,平均功耗约为 16MA,因此它应该可以运行几个小时才需要充电。
和往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请随时提问,因为我确实犯了很多错误。
最后说明一下,我不会以任何形式获得此模型中使用的设计、设备、零件和/或材料的报酬。
哦,还有最后一点,来自 Lora 和我以及我们全家,祝您和您的家人圣诞快乐!
使用 Autodesk Fusion 360 设计,使用 Cura 4.4.0 切片,并在 Ultimaker 2+ Extended、Ultimaker 3 Extended 和 Ultimaker S5 上以 PLA 打印。
3D模型打印参数
零件。我为该模型购买了以下零件:
• 一块 3.7vdc 100ma 锂电池 (https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 �...��电缆 (https://www.adafruit.com/product/3814)。
• 一个 N20 6VDC 74RPM 齿轮马达。
• 一个微动开关 (Uxcell a12013100ux0116 高旋钮 3P 2 位置 1P2T SPDT 垂直 • 滑动开关,0.5 安培,50V DC,50 件,3 毫米)。
您还需要一个合适的电池充电器。
我用 PLA 以 0.15 毫米层高 3D 打印了以下零件,填充率为 20%(除非另有说明)且没有支撑:
• 两个“Axle, Body.stl”,白色。
• 两个“Axle, Pin.stl”,白色。
• 一个“Axle, Seesaw.stl”。
• 四个“Band.stl”,黄色。
• 一个“Base.stl”,使用 Cura 4.4.0“Gradual Infill”选项,黑色,带有可选的 PVA 支持。
• 一个“Belt.stl”,黑色。
• 两个“Bolt, Shoulder.stl”,黄色。
• 一个“Buckle.stl”,黄色。
• 六个“Button.stl”,黄色。
• 一个“Cam And Axle.stl”,白色。
• 一个“Cam.stl”,白色。
• 两个“Cuff.stl”,绿色。
• 一个“Eye, Left.stl”,黑色。
• 一个“Eye, Right.stl”,黑色。
• 一个“Eyebrow, Left.stl”,黄色。
• 一个“Eyebrow, Right.stl”,黄色。
• 一个“Gear, Crown, Axle.stl”,白色。
• 一个“Gear, Crown, Motor.stl”,白色。
• 两个“Hand.stl”,白色。
• 一个“Hat, Medallion Button.stl”,黄色。
• 一个“Hat, Medallion.stl”,黄色。
• 一个“Hat, Pin.stl”,黑色。
• 一个“Hat.stl”,使用 Cura 4.4.0“Gradual Infill”选项,黑色。
• 一个“Head.stl”,白色。
• 一个“Leg Band, Left.stl”,黄色。•
• 一个“Leg Band, Right.stl”,黄色。
• 一个“Mustache.stl”,黄色。
• 两个“Pin”,白色。
• 一个“Seesaw.stl”,白色。
• 一个“Shoulders.stl”,黄色。
• 一个“Torso, Lower.stl”,红色。
• 一个“Torso, Upper.stl”,红色。
该模型是高精度打印和组装,有时在狭窄空间内使用非常小的精度 3D 打印部件。组装前,对所有部件进行试装和修整、锉平、钻孔、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都光滑。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
此模型还使用螺纹组装,因此我使用丝锥和板牙套装(6mm x 1)清洁螺纹。
组装帽子。
为了组装帽子,我执行了以下步骤:
• 将“Hat, Medallion Button.stl”压入“Hat.stl”。
• 将“Hat, Medallion.stl”粘到帽子组件上。
• 将“Hat, Pin.stl”粘到帽子组件上。
组装头部。
为了组装头部,我执行了以下步骤:
• 将“Eye, Right.stl”、“Eye, Left.stl”、“Eyebrow, Right.stl”和“Eyebrow Left.stl”按压并粘贴到“Head.stl”中。
• 将“Mustache.stl”粘贴到鼻子下方的组件上。
将帽子组件连接到头部组件。
为了将帽子组件连接到头部组件,我使用帽针作为定心引导,将两个组件粘在一起。
组装身体。
为了组装身体,我执行了以下步骤:
• 将四个“Button.stl”按压到“Torso, Upper.stl”中。
• 将“Buckle.stl”按压到“Belt.stl”上。
• 将皮带组件滑到躯干组件上,将皮带组件中的插槽与躯干组件上的腿对齐。
• 将“Shoulders.stl”压到躯干组件上。
• 将一个“Band.stl”放在躯干组件的一条腿上。
• 将一个“Bolt, Shoulder.stl”向上滑过肩部、躯干和带子。
• 将一个“Band.stl”放在躯干组件的剩余一条腿上。
• 将剩余的“Bolt, Shoulder.stl”向上滑过肩部、躯干和带子。
• 将一个“Cuff.stl”放在每个肩部螺栓上。
连接电机、开关和 JST 连接器。
为了连接电机、开关和 JST 连接器,我执行了以下步骤:
• 将 JST 连接器上的黑线剪至 20 毫米长,剥去末端的皮并镀锡,然后将其焊接到开关的中心端子上。
• 将剩余 80 毫米长的黑线末端跳线并镀锡,然后将其从开关的一个外部端子焊接到“-”电机端子。
• 将 JST 连接器的红线焊接到电机“+”端子。
接线后,我将电池连接到 JST 连接器,打开开关,并验证从电机轴端看电机轴是否顺时针旋转(如果不是,我反转了电机接线)。然后我关闭开关并断开电池。
组装底座。
要组装底座,我执行了以下步骤:
• 将剩余的两个“Button.stl”按入“Torso, Lower.stl”。
• 将电机从“Base.stl”的脚侧向上按入位置,使电机轴高出电机冠齿轮板表面 3 毫米。
• 将躯干组件放置在底座组件上(位于低音组件底座下孔上方的中心,按钮朝前),然后使用“Axle, Body.stl”将其固定到位,确保下半身在轴上自由摆动。
• 将开关、JST 连接器和电线穿过下半身组件,然后将开关压入下半身。
• 将“Gear, Crown, Motor.stl”压在裸露的电机轴上,与末端齐平,并用一小点氰基丙烯酸酯胶固定到位。
• 将“Gear, Crown, Axle.stl”放置在底座组件内较小的轴孔上方。
• 将“Cam and Axle.stl”的六角轴滑入底座组件较大的轴孔。
• 将六角轴轴穿过轴齿轮并从底座组件中较小的轴孔中压出(这必须是紧密配合,如果不是,我加了一小点氰基丙烯酸酯胶)。
• 将“Cam.stl”压到轴组件的六角轴端,使凸轮与“Cam And Axle.stl”组件成 180 度角(这必须紧密配合,如果不是,我添加了一小点氰基丙烯酸酯胶)。
• 将一个“Pin”滑入底座组件,并将凸轮环放置在凸轮上,然后用一个“Axle, Pin.stl”固定到位。
• 将剩余的“Pin.stl”滑入底座组件,并将凸轮环放置在凸轮上,然后用剩余的“Axle, Pin.stl”固定到位。
• 用手旋转电机齿轮,直到腿部销钉水平(一个凸轮笔直向前,其余凸轮笔直向后)。
• 将“Seesaw.stl”放置在底座组件的上部螺纹孔上,并用“Axle, Seesaw.stl”固定到位,确保跷跷板的中心两个齿围绕着下躯干齿轮的中心齿。
最终组装。
对于最终组装,我执行了以下步骤:
• 使用双面胶带将电池固定到位,然后将电池插入 JST 连接器。
• 将身体组件倒置,将底座组件滑入身体组件。
• 将一个“Band.stl”放置在身体组件的肩部螺栓上,将带子与底部躯干的轮廓对齐。
• 将一个“Hand.stl”放置在身体组件的肩部螺栓的螺纹上,将手柄放在躯干上,并通过顺时针旋转肩部螺栓将其固定到位(螺栓、上躯干、带子、袖口、带子和手形成一个“虎钳”机制,将底座组件固定到身体组件上)。
• 对剩下的手重复上一步。
• 使用小点氰基丙烯酸酯胶将头部固定到组件上。
• 使用小点氰基丙烯酸酯胶将两个“Leg Band, Left.stl”和“Leg Band, Right.stl”固定到底座上。
• 打开电源,胡桃夹子开始走针!
这就是我 3D 打印和组装胡桃夹子走针器的方法。
希望你喜欢它!