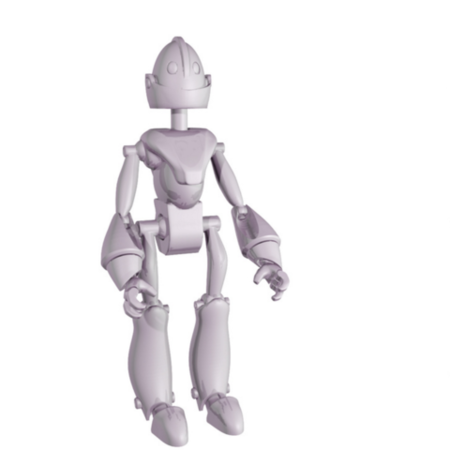
Ultimaker 机器人“pin walker”。 3D打印
























11606 视图 1 喜欢 0 下载 下载
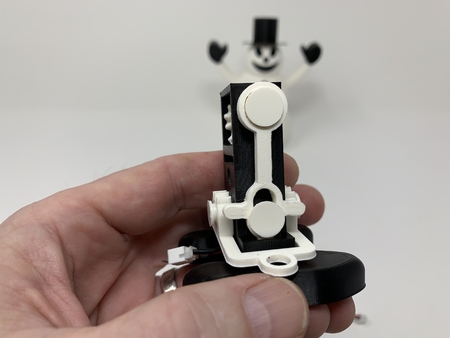
一位 Youtube 粉丝建议我设计一个“pin walker”机制,这是我从未见过或听说过�...�,所以他把我引向了 RobotHut 网站,我非常感兴趣,立即开始设计一个 pin walker 机制。设计机制后,由于我使用 Ultimaker 3D 打印机,我决定使用 Ultimaker 机器人作为 Ultimaker 机器人“Pin Walker”的主体来完成模型。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请不要犹豫,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
最后说明一下,我不会以任何形式获得此模型中使用的零件和/或材料的补偿。
购买、打印和准备零件。>/b>
我使用了以下耗材:
• 厚氰基丙烯酸酯胶。
• 氰基丙烯酸酯胶促进剂。
• 轻质机油。
• 焊料。
• 双面胶带。
此模型使用以下非 3D 打印部件:
• 一个 3.7vdc 100ma 锂电池 (https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 针电缆 (https://www.adafruit.com/product/3814)。
• 一个 N20 6VDC 150RPM 齿轮马达。
• 一个微动开关 (Uxcell a12013100ux0116 高旋钮 3P 2 位置 1P2T SPDT 垂直滑动开关,0.5 安培,50V DC,50 件,3 毫米)。
您还需要一个合适的电池充电器。
对于 3D 打印部件,我提供了文件“3D Printed Parts.pdf”,其中包含我打印的 3D 部件的部件名称、数量、层高、填充和支撑设置。
这是一个高精度打印和组装模型,有时使用非常小的部件,并且空间非常狭窄。组装前,对所有部件进行试装和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都是光滑的。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
该模型还使用螺纹组装,因此我使用丝锥和板牙套件(6mm x 1)进行螺纹清洁。
我使用少量厚氰基丙烯酸酯胶将车身后部与车身前部连接起来,将接线固定到底座上,并在需要时固定螺纹。
我还使用轻质机油来润滑齿轮和车轴。
为了连接机器人电机和开/关开关,我执行了以下步骤:
• 将 JST 连接器上的电线...剪至 40 毫米长,然后剥去电线末端的电线并镀锡。
• 将 JST 连接器上的黑线焊接到电机“-”端子。
• 将 JST 连接器上的红线焊接到外部开关端子之一。
• 将开关中心引脚上的红线焊接到电机“+”端子。
接线后,我将 JST 连接器连接到电池并操作开关以打开和关闭电机。
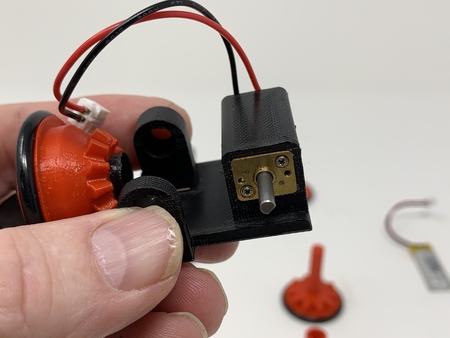
组装底座。
为了组装底座,我执行了以下步骤:
• 将齿轮电机压入“Base.stl”,使电机轴高于电机齿轮板 3 毫米。
• 将“Gear, Crown, Motor.stl”压到电机轴上。
• 将“Gear, Crown, Axle.stl”放置在底座组件内较小的轴孔上方。
• 将“Axle.stl”的较长六角轴滑入底座组件较大的轴孔中。
• 将较长的六角轴轴穿过轴齿轮并从底座组件中较小的轴孔中拉出。
• 将一个“Cam.stl”压在轴上并旋转齿轮系,使凸轮处于最高位置。
• 将剩余的“Cam.stl”压在轴的另一端,使凸轮处于最低位置(与第一个凸轮成 180 度)。
• 将一个“Leg.stl”滑入底座组件并将凸轮环放置在凸轮上方,然后用一个“Axle, Leg.stl”固定到位。
• 将剩余的“Leg.stl”滑入底座组件,并将凸轮环置于凸轮上方,然后用剩余的“Axle, Leg.stl”固定到位。
• 将“Seesaw.stl”置于底座组件上部螺纹孔上方,然后用“Axle, Seesaw.stl”固定到位。
• 将电池连接器按在底座组件上的机器人脚和电机外壳之间,然后使用双面胶带将电池固定到底座组件上。
此时,我将电机连接到电源以测试组件。我润滑并操作了组件,并注意到功耗为 18 到 20ma。
最终组装。
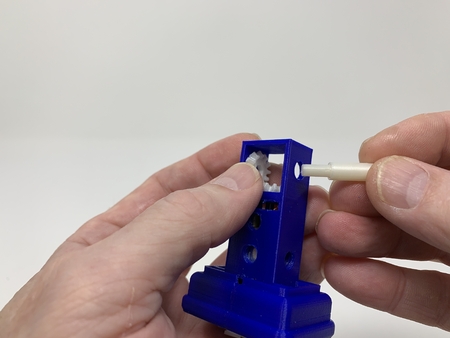
对于最终组装,我执行了以下步骤:
• 旋转齿轮系,直到跷跷板水平。
• 将“Ultimaker Robot, Front.stl”(或“Ultimaker Robot, Front.3mf”)放置在底座组件正面的下部螺纹孔上,确保机器人正面的齿轮齿与跷跷板上的齿轮齿啮合,然后用一个“Axle, Body.stl”固定到位。
• 将“Ultimaker Robot, Rear.stl”放置在底座组件背面的下部螺纹孔上,然后用剩余的“Axle, Body.stl”固定到位。
• 使用一小点氰基丙烯酸酯胶或小条双面胶带将身体两半固定在一起。
• 使用一小点氰基丙烯酸酯胶或一小条双面胶带将开关固定在脚内侧。
这就是我打印和组装 Ultimaker Robot“Pin Walker”的方式。
希望您喜欢它!
设计师
Greg Zumwalt3D 模型描述
Ultimaker 机器人的“Pin Walker”形式。一位 Youtube 粉丝建议我设计一个“pin walker”机制,这是我从未见过或听说过�...�,所以他把我引向了 RobotHut 网站,我非常感兴趣,立即开始设计一个 pin walker 机制。设计机制后,由于我使用 Ultimaker 3D 打印机,我决定使用 Ultimaker 机器人作为 Ultimaker 机器人“Pin Walker”的主体来完成模型。
像往常一样,我可能忘记了一两个文件,或者谁知道还有什么,所以如果您有任何问题,请不要犹豫,因为我确实犯了很多错误。
使用 Autodesk Fusion 360 设计,使用 Cura 4.2 切片,并在 Ultimaker 2+ Extended 和 Ultimaker 3 Extended 上以 PLA 打印。
最后说明一下,我不会以任何形式获得此模型中使用的零件和/或材料的补偿。
购买、打印和准备零件。>/b>
我使用了以下耗材:
• 厚氰基丙烯酸酯胶。
• 氰基丙烯酸酯胶促进剂。
• 轻质机油。
• 焊料。
• 双面胶带。
此模型使用以下非 3D 打印部件:
• 一个 3.7vdc 100ma 锂电池 (https://www.adafruit.com/product/1570)。
• 一根 JST PH 2 针电缆 (https://www.adafruit.com/product/3814)。
• 一个 N20 6VDC 150RPM 齿轮马达。
• 一个微动开关 (Uxcell a12013100ux0116 高旋钮 3P 2 位置 1P2T SPDT 垂直滑动开关,0.5 安培,50V DC,50 件,3 毫米)。
您还需要一个合适的电池充电器。
对于 3D 打印部件,我提供了文件“3D Printed Parts.pdf”,其中包含我打印的 3D 部件的部件名称、数量、层高、填充和支撑设置。
这是一个高精度打印和组装模型,有时使用非常小的部件,并且空间非常狭窄。组装前,对所有部件进行试装和修整、锉平、打磨等,以确保移动表面平稳移动,非移动表面紧密贴合。根据您的打印机、打印机设置和您选择的颜色,可能需要或多或少地进行修整、锉平和/或打磨。仔细锉平与构建板接触的所有边缘,以确保所有构建板“渗出物”都被清除,并且所有边缘都是光滑的。我使用小型珠宝锉刀和足够的耐心来执行此步骤。
该模型还使用螺纹组装,因此我使用丝锥和板牙套件(6mm x 1)进行螺纹清洁。
我使用少量厚氰基丙烯酸酯胶将车身后部与车身前部连接起来,将接线固定到底座上,并在需要时固定螺纹。
我还使用轻质机油来润滑齿轮和车轴。
3D模型打印参数
连接机器人电机和开/关开关。为了连接机器人电机和开/关开关,我执行了以下步骤:
• 将 JST 连接器上的电线...剪至 40 毫米长,然后剥去电线末端的电线并镀锡。
• 将 JST 连接器上的黑线焊接到电机“-”端子。
• 将 JST 连接器上的红线焊接到外部开关端子之一。
• 将开关中心引脚上的红线焊接到电机“+”端子。
接线后,我将 JST 连接器连接到电池并操作开关以打开和关闭电机。
组装底座。
为了组装底座,我执行了以下步骤:
• 将齿轮电机压入“Base.stl”,使电机轴高于电机齿轮板 3 毫米。
• 将“Gear, Crown, Motor.stl”压到电机轴上。
• 将“Gear, Crown, Axle.stl”放置在底座组件内较小的轴孔上方。
• 将“Axle.stl”的较长六角轴滑入底座组件较大的轴孔中。
• 将较长的六角轴轴穿过轴齿轮并从底座组件中较小的轴孔中拉出。
• 将一个“Cam.stl”压在轴上并旋转齿轮系,使凸轮处于最高位置。
• 将剩余的“Cam.stl”压在轴的另一端,使凸轮处于最低位置(与第一个凸轮成 180 度)。
• 将一个“Leg.stl”滑入底座组件并将凸轮环放置在凸轮上方,然后用一个“Axle, Leg.stl”固定到位。
• 将剩余的“Leg.stl”滑入底座组件,并将凸轮环置于凸轮上方,然后用剩余的“Axle, Leg.stl”固定到位。
• 将“Seesaw.stl”置于底座组件上部螺纹孔上方,然后用“Axle, Seesaw.stl”固定到位。
• 将电池连接器按在底座组件上的机器人脚和电机外壳之间,然后使用双面胶带将电池固定到底座组件上。
此时,我将电机连接到电源以测试组件。我润滑并操作了组件,并注意到功耗为 18 到 20ma。
最终组装。
对于最终组装,我执行了以下步骤:
• 旋转齿轮系,直到跷跷板水平。
• 将“Ultimaker Robot, Front.stl”(或“Ultimaker Robot, Front.3mf”)放置在底座组件正面的下部螺纹孔上,确保机器人正面的齿轮齿与跷跷板上的齿轮齿啮合,然后用一个“Axle, Body.stl”固定到位。
• 将“Ultimaker Robot, Rear.stl”放置在底座组件背面的下部螺纹孔上,然后用剩余的“Axle, Body.stl”固定到位。
• 使用一小点氰基丙烯酸酯胶或小条双面胶带将身体两半固定在一起。
• 使用一小点氰基丙烯酸酯胶或一小条双面胶带将开关固定在脚内侧。
这就是我打印和组装 Ultimaker Robot“Pin Walker”的方式。
希望您喜欢它!