Dextra 3D for print




13136 Views 2 Likes 0 Downloads Download the piece here from 3dforprint
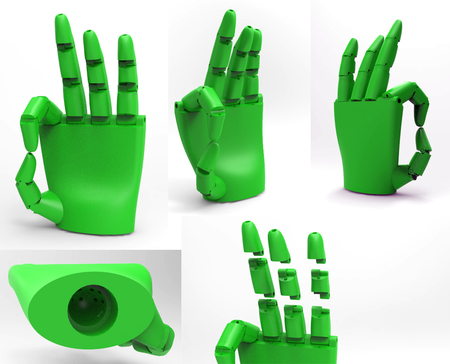
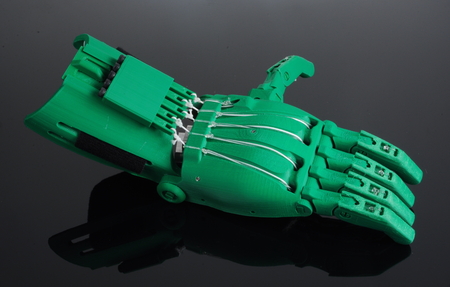
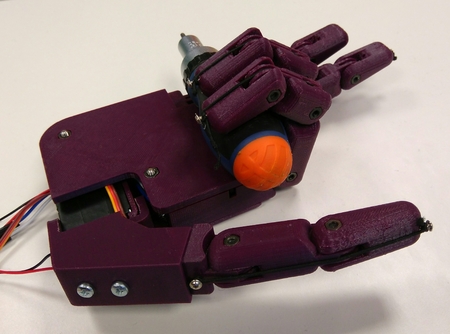
Dextra is a printable human-sized robotic hand that is being developed as an open-source and affordable alter...native to commercial robotic hand prosthesis. Although it has been designed to be used as a prosthesis, this robotic hand can also be used in education, research or more general applications in robotics. The key design points of Dextra are: adaptive grip, compact size, mechanical simplicity and ease of replication.
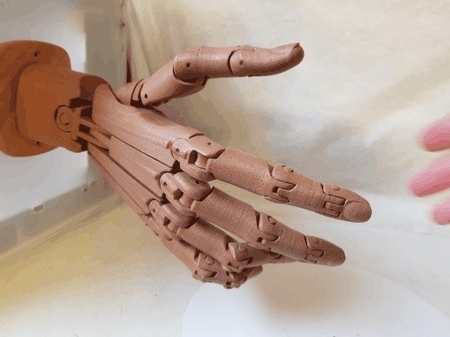
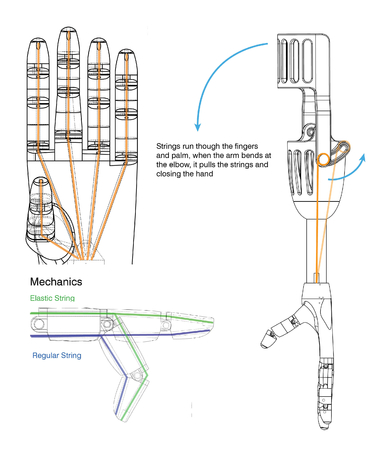
The mechanical design of Dextra is based on the finger module. A finger module comprises a compact linear actuator based on a geared DC micro motor, position feedback provided by a magnetic encoder, and the mechanical printable finger. This module is used in the four fingers of the hand, and the thumb is a variation of the same design. To reduce the size, as well as the mechanical complexity of Dextra, the fingers are underactuated, that is, they have more degrees of freedom (DOF) than actuators. Each finger module has three DOF and one motor, while the thumb has two DOF and one motor. Besides that, the abduction/adduction of the thumb is independently actuated by a servomotor.
The motion of the fingers of Dextra is controlled by a position control loop. Each finger is controlled by a PID loop that takes a position setpoint as the input and uses the feedback position measured by a magnetic quadrature encoder to adjust the real position of the DC motor driving the finger.
More details about the design and operation of Dextra can be found in its hackaday.io project page (https://hackaday.io/project/9890-dextra) and on its Github repository (https://github.com/Alvipe/Dextra.git).
5x spool.stl
4x motor_holder.stl
4x proximal.stl
4x middle.stl
4x distal.stl
1x motor_holder_thumb.stl
1x proximal_thumb.stl
...1x distal_thumb.stl
1x abductor.stl
1x palm.stl
1x dorsal.stl
Motors and electronics:
5x Pololu Micro Metal Gearmotor 1000:1 HP with extended motor shaft
5x DRV8838 Single Brushed DC Motor Driver Carrier
5x Pololu magnetic encoder for Micro Metal Germotors
1x Turnigy TGY-EX5252MG Twin BB Digital Micro Servo
1x Teensy 3.1
Other components:
1x Fishing line spool (0.6 mm max. diameter)
14x M3x14 screw
10x M3x8 screw
2x M3x12 screw
2x M3x12 spacer
26x M3 nut
Designer
Alvipe3d model description
Open-source myoelectric hand prosthesisDextra is a printable human-sized robotic hand that is being developed as an open-source and affordable alter...native to commercial robotic hand prosthesis. Although it has been designed to be used as a prosthesis, this robotic hand can also be used in education, research or more general applications in robotics. The key design points of Dextra are: adaptive grip, compact size, mechanical simplicity and ease of replication.
The mechanical design of Dextra is based on the finger module. A finger module comprises a compact linear actuator based on a geared DC micro motor, position feedback provided by a magnetic encoder, and the mechanical printable finger. This module is used in the four fingers of the hand, and the thumb is a variation of the same design. To reduce the size, as well as the mechanical complexity of Dextra, the fingers are underactuated, that is, they have more degrees of freedom (DOF) than actuators. Each finger module has three DOF and one motor, while the thumb has two DOF and one motor. Besides that, the abduction/adduction of the thumb is independently actuated by a servomotor.
The motion of the fingers of Dextra is controlled by a position control loop. Each finger is controlled by a PID loop that takes a position setpoint as the input and uses the feedback position measured by a magnetic quadrature encoder to adjust the real position of the DC motor driving the finger.
More details about the design and operation of Dextra can be found in its hackaday.io project page (https://hackaday.io/project/9890-dextra) and on its Github repository (https://github.com/Alvipe/Dextra.git).
3d model print parameters
Printable parts:5x spool.stl
4x motor_holder.stl
4x proximal.stl
4x middle.stl
4x distal.stl
1x motor_holder_thumb.stl
1x proximal_thumb.stl
...1x distal_thumb.stl
1x abductor.stl
1x palm.stl
1x dorsal.stl
Motors and electronics:
5x Pololu Micro Metal Gearmotor 1000:1 HP with extended motor shaft
5x DRV8838 Single Brushed DC Motor Driver Carrier
5x Pololu magnetic encoder for Micro Metal Germotors
1x Turnigy TGY-EX5252MG Twin BB Digital Micro Servo
1x Teensy 3.1
Other components:
1x Fishing line spool (0.6 mm max. diameter)
14x M3x14 screw
10x M3x8 screw
2x M3x12 screw
2x M3x12 spacer
26x M3 nut