Ada robotic hand 3d pour imprimer














20237 Vues 1 Goûts 1 Téléchargements Téléchargez ici la pièce à partir de 3dforprint
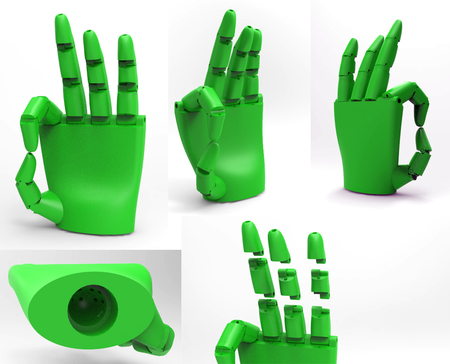
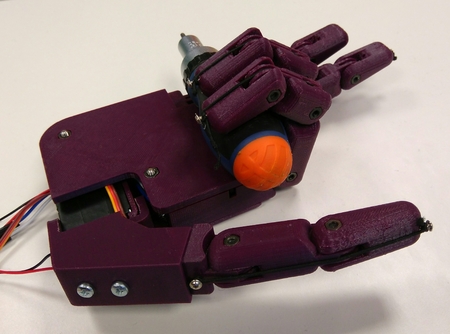
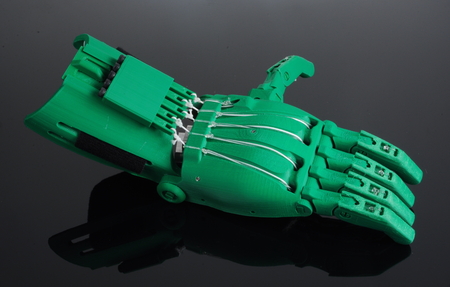
C...eci est la main robotique ADA d'Open Bionics (www.openbionics.com), une main robotique imprimable entièrement 3D, dérivée de la main robotique dextrus par le projet à main ouverte. Cette conception de la main est entièrement open source et gratuite pour vous télécharger et télécharger et télécharger et vous télécharger et utiliser.
Tous les composants requis pour une main droite commencent par «R» et les composants pour une main gauche commencent par «L».
Une seule main nécessite les composants imprimés 3D suivants:
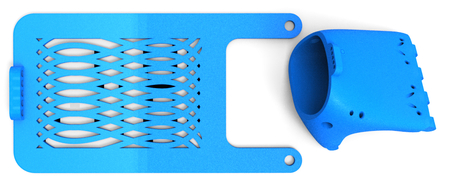
- Palm - Ninjaflex
- Couverture arrière - PLA / ABS
- PCB Tray supérieur - PLA / ABS
- Bac PCB inférieur - PLA / ABS
Composants imprimés non 3D:
- 9 boulons x m3 (longueur de 6 mm)
- 13 x M3 Inserts poussants filetés
- 1 m x chaîne tendon de 0,7 mm
- 5 x actionneurs linéaires Firgelli 12V (PQ12-30-12-P)
- 1 x Bionics Amond Electronics
- 5 X Micro Gel Fingertip Grips]
- Super colle
(Tous les composants ci-dessus sont disponibles sur www.openbionics.com/shop)
Historique des versions
16/02/16 - ADA V1.1
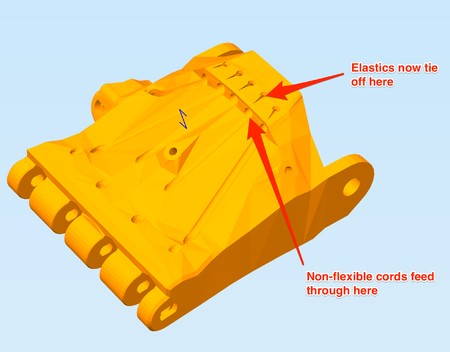
Un pas a été ajouté du côté dorsal (arrière) des joints proximaux. Cela "absorbe" l'impact de tout curling de couche supérieure pendant l'impression, protégeant les articulations. Cela devrait empêcher toute imprime de mains avec des doigts disquettes sur des machines non optimisées.
02/02/16 - ADA V1.0
Libération initiale de la main ADA
Pour les instructions d'assemblage et un guide sur l'installation du firmware, nous avons écrit quelques tutoriels (www.openbionics.com/tutorial).
Ce travail est concédé sous licence Creative Commons Attribution-Sharealike 4.0 International Licence (http://creativecommons.org/licenses/by-sa/4.0/)
- 9 boulons x m3 (longueur de 6 mm)
- 13 x M3 Inserts poussants filetés
- 1 m x chaîne tendon de 0,7 mm
- 5 x actionneu...rs linéaires Firgelli 12V (PQ12-30-12-P)
- 1 x Bionics Amond Electronics
- 5 X Micro Gel Pringertip Grips
- Super colle
(Tous les composants ci-dessus peuvent provenir de www.openbionics.com/shop)
Designer
Open BionicsDescription du modèle 3D
La main robotique ADA d'Open Bionics, une main robotique imprimable entièrement 3D, dérivée de la main robotique dextrus par le projet Open Hand.C...eci est la main robotique ADA d'Open Bionics (www.openbionics.com), une main robotique imprimable entièrement 3D, dérivée de la main robotique dextrus par le projet à main ouverte. Cette conception de la main est entièrement open source et gratuite pour vous télécharger et télécharger et télécharger et vous télécharger et utiliser.
Tous les composants requis pour une main droite commencent par «R» et les composants pour une main gauche commencent par «L».
Une seule main nécessite les composants imprimés 3D suivants:
- Palm - Ninjaflex
- Couverture arrière - PLA / ABS
- PCB Tray supérieur - PLA / ABS
- Bac PCB inférieur - PLA / ABS
Composants imprimés non 3D:
- 9 boulons x m3 (longueur de 6 mm)
- 13 x M3 Inserts poussants filetés
- 1 m x chaîne tendon de 0,7 mm
- 5 x actionneurs linéaires Firgelli 12V (PQ12-30-12-P)
- 1 x Bionics Amond Electronics
- 5 X Micro Gel Fingertip Grips]
- Super colle
(Tous les composants ci-dessus sont disponibles sur www.openbionics.com/shop)
Historique des versions
16/02/16 - ADA V1.1
Un pas a été ajouté du côté dorsal (arrière) des joints proximaux. Cela "absorbe" l'impact de tout curling de couche supérieure pendant l'impression, protégeant les articulations. Cela devrait empêcher toute imprime de mains avec des doigts disquettes sur des machines non optimisées.
02/02/16 - ADA V1.0
Libération initiale de la main ADA
Pour les instructions d'assemblage et un guide sur l'installation du firmware, nous avons écrit quelques tutoriels (www.openbionics.com/tutorial).
Ce travail est concédé sous licence Creative Commons Attribution-Sharealike 4.0 International Licence (http://creativecommons.org/licenses/by-sa/4.0/)
Paramètres d'impression du modèle 3D
Composants imprimés non 3D:- 9 boulons x m3 (longueur de 6 mm)
- 13 x M3 Inserts poussants filetés
- 1 m x chaîne tendon de 0,7 mm
- 5 x actionneu...rs linéaires Firgelli 12V (PQ12-30-12-P)
- 1 x Bionics Amond Electronics
- 5 X Micro Gel Pringertip Grips
- Super colle
(Tous les composants ci-dessus peuvent provenir de www.openbionics.com/shop)